
上一期我們更新了蔡老師整理的物理系列叢書
今天我們就來看看第三個知識體系,機械與動力~
全面的
框架
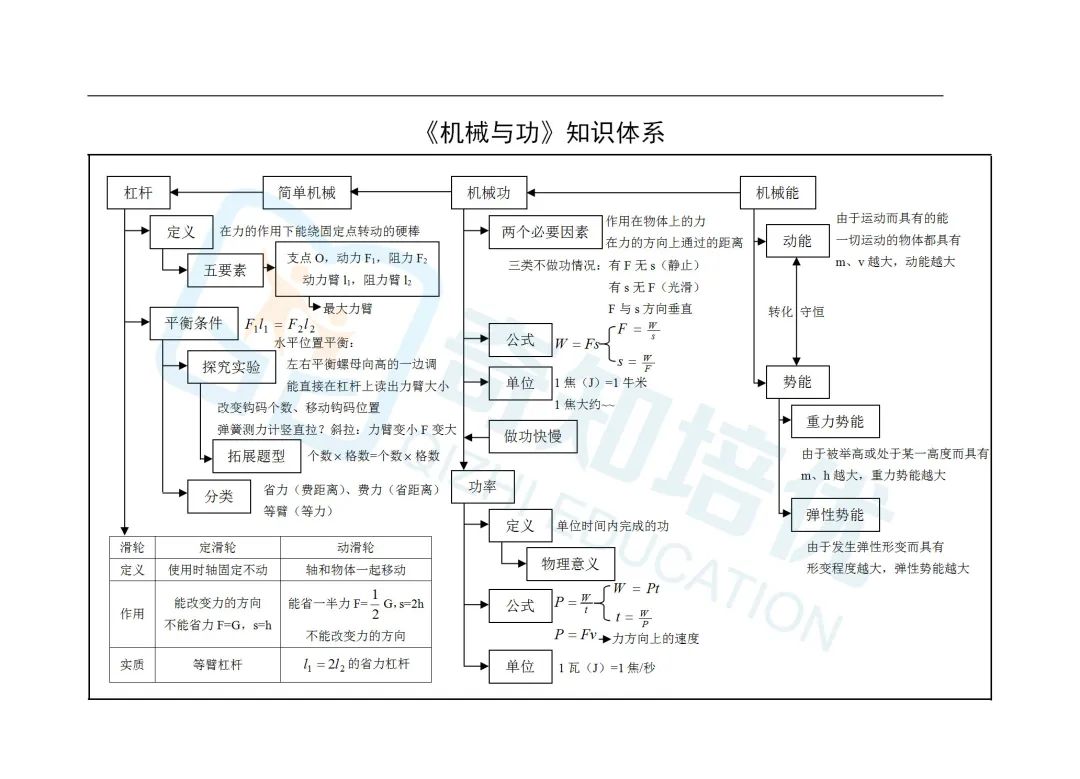
1. 杠桿
1、定義:在力的作用下繞固定點轉動的硬桿稱為杠桿。
闡明:
①杠桿可以是直的,也可以是彎的,形狀任意。
②在某些情況下,可以實際轉動杠桿來幫助確定支點。 如:魚竿、鏟子。
2.五個要素——杠桿構成圖。
① 支點:杠桿轉動的點。 用字母O表示。
②動力:使杠桿轉動的力。 用字母F1表示。
③阻力:阻礙杠桿轉動的力。 用字母F2表示。
(說明:力和阻力都是作用在杠桿上的力,所以作用點在杠桿上。
力和阻力的方向不一定相反,但它們使杠桿旋轉方向相反)
④動力臂:支點到動力作用線的距離。 用字母l1表示。
⑤阻力臂:支點到阻力作用線的距離。 用字母l2表示。
3、畫杠桿臂的方法:一是找支點,二是畫線,三是距離,四是標注。
⑴找到支點O; ⑵延長力的作用線(虛線); ⑶畫出力臂(實心雙箭頭,畫一條過支點垂直于力作用線的垂線); ⑷ 標記力臂
研究杠桿的均衡條件:
杠桿平衡是指:杠桿水平靜止或勻速旋轉。
實驗前:應調整杠桿兩端的螺母,使杠桿在水平位置保持平衡。 這樣做的目的是輕松測量杠桿的力臂。
結論:杠桿(或杠桿原理)的均衡條件是:
功率×功率臂=阻力×阻力臂。 寫為公式F1l1=F2l2,也可寫為:F1 / F2=l2 / l1
解題指導:分析解決杠桿平衡條件相關問題,必須畫出杠桿示意圖; 明確力和方向以及力臂的大小; 然后具體情況分析,確定如何利用平衡條件解決相關問題。 (例如:杠桿轉動時所施加的力量如何變化,向哪個方向施加的力最小等)
解決平衡杠桿時的最小力量問題:在這類問題中,阻力×阻力臂是某個值。 為了最小化功率,必須最大化功率臂。 要使力臂最大化,①在杠桿上找一點,使這個支點距離最遠; ②力的方向應為通過該點并垂直于連線的方向。
4. 應用:
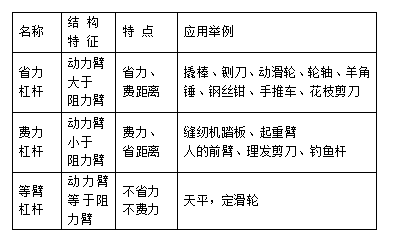
注:杠桿應根據實際情況選擇。 當需要較大的力來解決問題時英語作文,應選擇省力杠桿。 當使用方便、節省距離時,應選用省力杠桿。
2.滑輪
1、定滑輪:
①定義:中間有固定軸的滑輪。
②本質:定滑輪的本質是:等臂杠桿
③特點:使用定滑輪不能省力,但可以改變動力方向。
④對于理想的定滑輪(不包括軸間摩擦)F=G
繩索自由端的移動距離SF(或速度VF)=重物的移動量
距離SG(或速度VG)
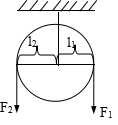
2、動滑輪:
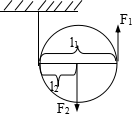
①定義:承載重物移動的滑輪。 (可以上下左右移動)
②本質:動滑輪的本質是:動力臂是一個省力的杠桿,是阻力臂的兩倍。
③特點:使用動滑輪可以節省一半的力,但不能改變力的方向。
理想的動滑輪(不計算軸間摩擦力和動滑輪重力)為:
F=G/2 若僅忽略輪軸間的摩擦力,則拉力F=(G物體+G移動)/2;
繩索自由端移動的距離是重物移動距離的兩倍S(或VF)= 2 h(或VG)
3.滑輪組
①定義:定滑輪和動滑輪組合成滑輪組。
②特點:使用滑輪不僅可以節省勞動力,而且可以改變動力的方向。
③理想滑輪單元(不計算軸間摩擦力和動滑輪重力)的拉力為F=G/n。 僅忽略軸間摩擦力,拉力 F=(G 物體 + G 運動)/n 繩索自由端移動的距離為 n 乘以重物移動的距離 SF(或 VF)= nhG(或 VG)
④滑輪組的組裝方法:首先根據公式n=(G物體+G運動)/F求出繩索的股數。然后根據“奇動偶定”的原則。 根據課題的具體要求組裝滑輪。
3. 鑼
1、力學中所說的功包括兩個必要因素:一是作用在物體上的力;二是作用在物體上的力。 另一個是物體沿力的方向移動的距離。
2、不做功有三種情況:力無距離、力無距離、力與距離垂直。
鞏固:☆某同學踢足球,球從他腳后飛出10m。 當足球飛10m時,人不做任何工作。 (原因是足球靠慣性飛出去了)。
3. 力學規定,功等于力與物體沿力方向移動的距離的乘積。 公式:W=FS
4、功的單位:焦耳,1J=1N·m。 將雞蛋舉起1m高,所做的功約為0.5J。
5、應用功公式注意事項:
①區分哪個力作用在物體上,計算時F就是這個力;
②式中S必須是力方向上經過的距離,強調對應。
③ 功的單位是“焦耳”(N·m=焦耳),不要與力和力臂的乘積的單位(N·m,不能寫成“焦耳”)混淆。
4. 電源
1.定義:單位時間內完成的工作
2、物理意義:表示做功速度的物理量。
3、公式:P=W/t
4.單位:主要單位W,常用單位kW mW馬力
換算:1kW=103W 1mW=106W 1馬力=735W
汽車的功率為66kW,這意味著:汽車在1秒內完成工作
5、功的原理
1、內容:
使用機械時,人所做的工作不會少于手工直接完成的工作; 也就是說,使用任何機械都不會節省工作量。
2. 說明:(請注意理想工作原理如何表達?)
①工作原理是一個普遍結論,適用于任何機器。
②工作原理告訴我們:用機械省力,就必須拉遠距離; 為了節省距離,必須付出努力。 沒有一種機器既省力又省距離。
③雖然使用機械不能省力,但人類還是使用它,因為使用機械可以省力、節省距離、改變力的方向,給人類的工作帶來很多方便。
④我們遇到的大多數問題都是理想機器(忽略摩擦力和機器本身的重力)。 理想機器:使用機器時,人所做的功(FS)=用手直接對重物所做的功(Gh)
6、機械效率
1、有用工作的定義:對人有用的工作。
公式:W 有用 = Gh(舉起重物) = W 總計 - W 數量 = ηW 總計
坡度:W 有用 = Gh
2.額外工作的定義:我們不需要但必須做的工作

公式:W量=W總量-W有用=G動h(動滑輪與滑輪組忽略軸摩擦力)
斜面:W=fL
3.總功的定義:有用功加上額外功或功率所做的功
公式:W總量=W有用+W量=FS=W有用/η
斜面:W總計=fL+Gh=FL
4、機械效率:
①定義:有用功與總功的比值。
②公式:
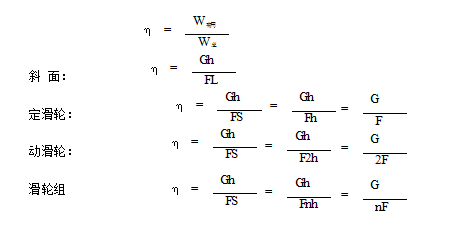
③ 有用功總是小于總功,因此機械效率總是小于1。通常用百分比表示。 滑輪的機械效率為60%,這意味著有用功占總功的60%。
④提高機械效率的方法:減輕機械重量,減少零件間的摩擦。
5、機械效率的測量:
①原理:
②待測物理量:鉤碼重力G、鉤碼提升高度h、拉力F、繩索自由端移動距離S
③設備:除吊鉤碼外,還需要鐵架、滑輪、細鋼絲、秤、彈簧測力計等。
④步驟:必須勻速拉動彈簧測力計,使吊鉤碼上升。 目的:保證測功機指示保持不變。
⑤結論:影響滑輪組機械效率的主要因素有:
A、動滑輪越重、數量越多,額外做功越大。
B. 提升物體越重初中物理滑輪知識點初中物理滑輪知識點,做的有用功就越多。
C、摩擦。 摩擦力越大,做的額外功就越多。
纏繞方式和重物提升高度不影響滑輪的機械效率。
動能和勢能
1.能量:如果一個物體可以對外做功,我們就說它有能量。 能量和功的單位是焦耳。 有能量的物體不一定在做功;有能量的物體不一定在做功。 做功的物體必須有能量。
2、動能:物體因運動而具有的能量稱為動能。
3.所有運動的物體都具有動能。 物體是否具有動能的標志是它是否在運動。
4、勢能包括重力勢能和彈性勢能。
5、重力勢能:物體由其高度決定的能量稱為重力勢能。
6、彈性勢能:物體因彈性變形而具有的能量稱為彈性勢能。
機械能及其轉化
1、機械能:動能和勢能統稱為機械能。 動能是物體運動時所具有的能量,勢能是儲存的能量。 動能和勢能可以相互轉換。 如果僅動能和勢能相互轉換,總機械能不變,即機械能守恒。
2、動能與重力勢能的換算規則:
① 一定質量的物體加速下落,動能增大,重力勢能減小,重力勢能轉化為動能;
② 一定質量的物體減速上升,其動能減少,重力勢能增加,動能轉化為重力勢能。
3、動能與彈性勢能的換算規則:
① 如果一個物體的動能減小,而另一個物體的彈性勢能增大,則動能轉化為彈性勢能;
②如果一個物體的動能增大,而另一個物體的彈性勢能減小,則彈性勢能轉化為動能。
蔡老師物理知識體系系列正在持續更新中。
下一期將為您帶來質量和密度。
讓我們一起期待吧~


