學好簡單機械的關鍵66j物理好資源網(原物理ok網) 簡單機械包括杠桿、滑輪、輪軸和斜面等,重點內容是杠桿、杠桿的平衡條件、滑輪和滑輪組等。掌握以下關鍵點就能順利地學好本部分內容。
66j物理好資源網(原物理ok網) 一、杠桿66j物理好資源網(原物理ok網) 學習杠桿的關鍵點:(1)支點是杠桿繞著轉動的點,同一根杠桿使用方法不同,支點的位置可能不同,要能根據具體情況區分支點。(2)畫動力或阻力時應注意力的作用點和方向。動力和阻力都是杠桿受到的力,其作用點都在杠桿上。有同學認為同一根杠桿上動力和阻力的方向一定相同,有同學認為一定不同,這都是錯誤的。正確的認識是:動力和阻力能使杠桿轉動的方向一定是相反的。即一個力能使杠桿向順時針方向轉動,則另一個力一定是能使杠桿向逆時針方向轉動。(3)力臂不是支點到力的作用點的距離,而是支點到力的作用線的距離。借用幾何用語,力臂不是點到點的距離,而是點到直線的距離。作點到直線的距離必須使用直角三角板的兩個直角邊。
66j物理好資源網(原物理ok網) 例1 小明進行的實驗是“探究杠桿的平衡條件”,他在完成教材中的探究任務后,又多加了一個彈簧測力計繼續進行探究。他的困惑是:在圖1所示杠桿已經平衡的情況下,不知道怎樣測彈簧拉力的力臂。請你在圖1中幫小明作出彈簧拉力
F對支點
O的力臂。
66j物理好資源網(原物理ok網)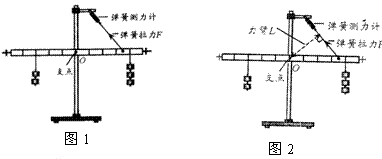 66j物理好資源網(原物理ok網) 解析:
66j物理好資源網(原物理ok網) 解析:畫力臂可以按“找點、畫線、作垂線、標符號”這樣的步驟完成。“找點”──找支點。由題意知,杠桿的支點是
O;“畫線”──畫出力的作用線。將
F分別向兩端延長,變為一條直線,就是力的作用線。“作垂線”──用直角三角板的兩條直角邊從支點
O向力的作用線畫垂線,支點到垂足的距離就是力臂。“標符號”──把支點到垂足的距離用大括號或帶箭頭的線段勾出,在旁邊標上字母
L。
66j物理好資源網(原物理ok網) 答案:如圖2所示。
66j物理好資源網(原物理ok網) 二、杠桿平衡條件及應用66j物理好資源網(原物理ok網) (1)利用杠桿平衡條件來判斷一個桿桿是否平衡,若等式成立桿桿平衡,反之不平衡。
66j物理好資源網(原物理ok網) (2)利用杠桿 平衡條件進行有關計算。先根據杠桿轉動的效果,找出動力和阻力;再根據支點的位置,確定每個力的力臂;最后根據杠桿的平衡條件,代入數據計算出結果。
66j物理好資源網(原物理ok網) (3)三種杠桿的劃分:依據是杠桿的平衡條件,即F1L1=F2L2,若
L1>
L2,則
F1<
F2;同理可得出其它結論。三種杠桿的劃分與比較見下表。
| 杠桿名稱 |
力臂的比較 |
力的比較 |
距離的比較 |
特點 |
| 省力杠桿 |
動力臂大于阻力臂 |
動力小于阻力 |
動力作用點移動的距離大于阻力點移動的距離 |
能省力但費距離 |
| 費力杠桿 |
動力臂小于阻力臂 |
動力大于阻力 |
動力作用點移動的距離小于阻力點移動的距離 |
費了力但能省距離 |
| 等臂杠桿 |
動力臂等于阻力臂 |
動力等于阻力 |
動力作用點移動的距離等于阻力點移動的距離 |
雖不省力但能改變用力的方向 |
例2 桿秤是一種很古老但現在仍然在廣泛使用的一種測量質量的工具。小林同學用一桿秤稱一實心球的質量,如圖3所示。當桿秤在水平位置平衡時,秤砣拉線正好壓在4 kg的刻度線上。根據秤砣拉線、提紐和稱鉤所在秤桿的位置之間的距離的粗略關系,可以估測出秤砣的質量大約是( )
66j物理好資源網(原物理ok網)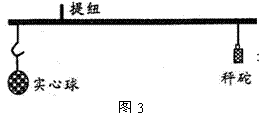 66j物理好資源網(原物理ok網)
66j物理好資源網(原物理ok網) A.10 g
66j物理好資源網(原物理ok網) B.400 g
66j物理好資源網(原物理ok網) C.1000 g
66j物理好資源網(原物理ok網) D.4000 g
66j物理好資源網(原物理ok網) 解析:桿秤是利用杠桿的平衡條件工作的,桿秤平衡時滿足。此時的
F1. F2分別是實心球和秤砣對秤桿的拉力,其大小就等于它們受到的重力。秤砣拉線正好壓在4 kg的刻度線上,說明實心球的質量為4 kg。當桿秤在水平位置平衡時,提紐到稱鉤所在秤桿位置的距離,及提紐到秤砣拉線的距離分別是
L1. L2。根據圖3估計
L2=4
L1。
66j物理好資源網(原物理ok網) 答案:C
66j物理好資源網(原物理ok網) 例3 汶川地震中,滾滾的山石擋住了道路。增援人員要用撬棒撬開山石,分別沿如圖所示的四個方向用力,其中最省力的是
66j物理好資源網(原物理ok網) A.沿
F1方向 B.沿
F2方向
66j物理好資源網(原物理ok網) C.沿
F3方向 D.沿
F4方向
66j物理好資源網(原物理ok網)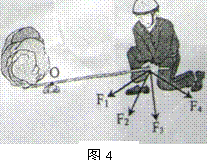 66j物理好資源網(原物理ok網) 分析:
66j物理好資源網(原物理ok網) 分析:題目中撬棒的支點是O,什么時候最省力呢?根據杠桿的平衡條件,,在
F2 、
L2不變的情況下,要使
F1 最小,必須使
L1 最大。
L1 的最大值是多少呢?圖中
L1 的最大值就等于
O點到手的距離,與之垂直的力就是最小的力。
66j物理好資源網(原物理ok網) 答案:C.
66j物理好資源網(原物理ok網) 點撥:要作出使杠桿平衡的最小的力,根據杠桿的平衡條件,必須使這個力的力臂最長。一般情況下,這個最長的力臂就是從支點到力的作用點的長度, 與之垂直的力就是最小的力。
| 類型 |
定義 |
特點 |
實質 |
重物提升的高度h與繩子通過的距離s的關系 |
| 定滑輪 |
使用過程中,滑輪的位置不改變 |
不省力,但可以改變用力方向66j物理好資源網(原物理ok網)
F=G物(不計摩擦) |
等臂杠桿 |
s = h |
| 動滑輪 |
使用過程中,滑輪的位置隨物體改變 |
能省力,但不能改變用力方向66j物理好資源網(原物理ok網)
F = (G物+G動)/2(不計摩擦) (G物+G動)/2(不計摩擦) |
動力臂是阻力臂二倍的省力杠桿 |
s =2h |
| 滑輪組 |
將定滑輪和動滑輪組合在一起即為滑輪組 |
可以省力,也可以改變用力方向66j物理好資源網(原物理ok網)
F = (G物+G動)/n(不計摩擦,n 指承擔物重的繩子的股數) (G物+G動)/n(不計摩擦,n 指承擔物重的繩子的股數) |
|
s = nh(n 指承擔物重的繩子的股數) |
例4 如圖5所示,不考慮滑輪與輕繩之間的摩擦,米袋總重為800N,而繩上吊著的靜止的“紳士”重500N,則米袋對地面的壓力為( )
66j物理好資源網(原物理ok網) A.500N B.250N C.300N D.800N
66j物理好資源網(原物理ok網) 66j物理好資源網(原物理ok網) 解析:
66j物理好資源網(原物理ok網) 解析:從圖5判斷,圖中的滑輪是定滑輪,“紳士”通過定滑輪對米袋向上的拉力等于他的重力,則米袋對地面的壓力為800N-500N=300N.
66j物理好資源網(原物理ok網) 答案:C
66j物理好資源網(原物理ok網) 例5 用滑輪組將一個重為5N的物體勻速提升10cm,由圖6可知,繩端受到的拉力
F為 N,繩端移動的距離
s為 cm。
66j物理好資源網(原物理ok網)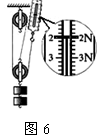 66j物理好資源網(原物理ok網) 解析:
66j物理好資源網(原物理ok網) 解析:繩端受到的拉力可以通過彈簧測力計讀出,為2.0N。從滑輪組的繞線可以看出有三股繩子連著動滑輪,所以n=3,則
s =
nh =3×10cm=30cm。
66j物理好資源網(原物理ok網) 答案:2.0 30
66j物理好資源網(原物理ok網) 例6 小漢同學在“研究動滑輪特點”的實驗時,進行了正確操作,并記錄數據如下表,分析數據后發現,實驗結果與課本中“使用動滑輪能省一半力”的結論不符。面對這一事實,下列做法中
最不可取的是( )
| 實驗次數 |
物重G/N |
拉力F/N |
| 1 |
1.0 |
0.65 |
| 2 |
1.5 |
0.90 |
| 3 |
2.0 |
1.15 |
A.與同學分析可能原因
66j物理好資源網(原物理ok網) B.實驗失敗,停止實驗
66j物理好資源網(原物理ok網) C.改進實驗條件,重新實驗
66j物理好資源網(原物理ok網) D.查閱資料,了解結論的適用條件
66j物理好資源網(原物理ok網)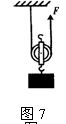 66j物理好資源網(原物理ok網) 解析:
66j物理好資源網(原物理ok網) 解析:對于“使用動滑輪能省一半力”,我們是通過實驗探究得出來的。可是小漢同學在進行這個實驗時,實驗結果卻與課本中的結論不符。問題在哪里呢?題目排除了操作錯誤,記錄的數據也正確。實際上,物理中的許多結論都是在忽略某些次要因素的基礎上得出的。“使用動滑輪能省一半力”,是在不考慮動滑輪和繩子的重力,并不考慮摩擦的情況下獲得的結論。而在進行實驗時,這些因素都是存在的。如果把這些因素都考慮進去,勢必得不出規律性的東西,得不到正確的結論。怎么辦呢?此時就要設法減小以上次要因素的影響,如選用更輕的動滑輪和繩子,進一步減小摩擦,還有盡可能使物體重力更大一些等。
66j物理好資源網(原物理ok網) 答案:B
66j物理好資源網(原物理ok網)
發表評論