大學第一學期課程名稱(系、系) 學年 機械原理 指導班主任 中學生職稱 專業名稱 班級學號 起止日期 年月 課程設計任務書 年月 大學機械工程系(系)年月日目錄 1.設計任務書設計方案分析與評價... 12 機械傳動系統的速比及變速系統... ………… 13 執行機構運動規范設計…………………………………………………………………………………………………… …………………………………………………………………………………………………………………… ………………………………………………] ……………………………………16 速度和加速度分析………………………………………… …………………………………………………………………………………………………………………… 16 ..................... 17 十一設計總結 ............................................... ..................................................... ..................................................... ..................................................... ..................................................... ..................................................... .......................................第18課設計任務書學院(系、系)專業課課程名稱:機械原理課程設計課程名稱:精密特種壓力機運動圖設計時限: 一、設計任務及主要技術參數壁式鋁合金鑄件及設計要求: 1、具有快速逼近錐面、等速下引、快速回位的運動特性; 2、成品生產率約903個/分鐘,上模總行程280mm。 拉伸行程置于總行程中間,約100mm; 4.成型率變化率K; 鑄件最大輸送距離為200mm; 7、上模滑塊總重量為40kg,最大生產阻力為5000N,假定為拉深區生產平衡阻力; 8. 設置最大擺動預制構件質量為40kg/m,繞剛體旋轉力矩為2kg.m/mm。 剛體簡化為桿長的中點,忽略其他預制構件的質量和轉動矩; 9. 傳動裝置等效轉矩設定為30kgm,機器運行不均勻系數[δ]=; 動作與協調需要制定運動循環圖,選擇執行器,構思機械運動方案,并進行選擇與評價,確定機械運動的總體方案,確定機械運動的速度傳輸系統按任務書上的技術參數。 變比變速機構,制作機構運動示意圖,分析設計相關執行機構的具體尺寸。
需要一份設計規范和一兩張相關圖紙。 (有條件要求使用3D動畫解說)。 起止日期,構思機械運動方案,運動分析及制圖,組織指令和防御工作內容。 上海:高等教育出版社,2008:15-200 主要是鄒慧君. 機械原理課程設計[M]. 上海:高等教育出版社,2009:15-250 參考資料 指導班主任:系**研究室)主任:年月 一、工作原理及工藝動作過程簡介有壁的鋁合金鑄件沖壓工藝。 如圖所示,上模先以逐漸增加的速度接近鑄件,然后勻速拉深成型,然后上模繼續向下運動將成品推出型腔,最后返回迅速地。 上模推出固定的下模后,送料機構將新鑄件從側面送到待加工位置,從而完成一個循環。 圖1-1 特種精壓機運動示意圖 2.流程動作分解 根據任務書的要求,機器的流程應該寫成:機構有一個注射機構和一個送料機構,它執行預制構件的運動方式是: 1)沖壓過程中預制構件上模的一般運動規律如圖1-2所示。 圖1-22),送料機構是輔助工作機構,需要與注塑機構配合。 送料運動是間歇式的,即沖頭送入預制構件將原材料送至模孔上方后即可進入模孔注射,直到沖頭向上移動一定時間后才進行最后一次送料動作距離。 鑄件最大輸送距離為200mm。 送料機構的一般運動規律如圖1-3所示: 圖1-3根據工藝動作和協調要求制定運動循環圖。 對于特種精密壓力機運動圖的循環圖,主要是確定注塑機構和進料結構的預制件。 各執行器的順序和相位有利于各執行器的設計、裝配和調試。
特種精密壓力機的注塑機構為主體機構,以其活動部件零角為橫坐標起點,縱坐標為各預制件位移起始位置。 圖1-4為精壓機兩種機構的運動循環圖。 注塑機構由工作行程和回程兩部分組成。 送料運動是間歇式的,即沖頭送入預制構件將原材料送至模孔上方后即可進入模孔注射,直到沖頭向上移動一定時間后才進行最后一次送料動作距離。 因此,在注射成型前,送料機構必須將鋼錠送入模孔等待注射成型。 圖1-4 運動循環圖 三、沖壓機構和送料機構運動方案的制定 1、機構的組成 整個機構分為注射機構和送料機構兩部分。 主要移動預制件分別為上模和推桿。 輸送帶送料機構可采用曲軸機構、槽輪機構、棘輪機構和不完全蝸桿實現間歇送料。 如果考慮成品的切邊,則需要一個提升拉制成品的機構配合推桿完成將成品推出模腔的運動。 2、運動方案方案1 設計方案1的注塑機構由四連桿機構與手柄滑塊機構串聯組成,進料機構為曲柄滑塊機構。 該方案的自由度為一個,自由度的個數等于原動機的個數,可以滿足傳動要求。 該機構增壓時間短,一次傳動角最大,效率高,成本低什么是機械運動簡圖,但工作穩定性一般,加工裝配難度大。 圖2-1 方案1 機構運動示意圖 方案2 導桿-手柄滑塊注射機構及曲軸進給機構 注射成型機構是在倒桿機構的基礎上串接手柄滑塊機構的組合。
導桿機構按給定的行程率變化系數設計,與手柄滑塊機構組合,可滿足工作段近勻速的要求。 適當選擇導向位置可使工作段的壓力角變小。 進給機構的曲柄機構通過曲柄機構與曲軸連接。 根據機構的運動圖確定曲軸的工作角度和從動件的運動規律,然后機構可以在預定的時間將型腔送至子加工位 曲軸進給機構 注塑機構采用二自由度雙曲柄七桿機構,用蝸桿合為一自由度。 適當選擇點的軌跡和確定預制件的規格,可以保證機構具有快速返回運動的特點,工作段接近勻速,壓力角盡可能小。 該機制可以使用實驗方法進行設計; 當要求較高時,可采用解析法,或將實驗法得到的結果作為優化設計的初值。 進給機構由曲軸機構和曲軸機構串聯組成。 根據機構的運動循環圖,可以確定曲軸的工作角度和從動件的運動規律,從而在預定的時間將型腔送到加工位置。 圖2-3 方案三運動圖方案四曲軸曲軸注塑進料機構進料機構和注塑機構均由曲軸機構組成。 曲軸機構可以通過推算桿的長度來設計,選擇合適的規格后,就可以實現所需的速比和運動要求。 通過適當選擇鉸接點和拉桿長度,可使機構具有更小的壓力角和更理想的傳動角,從而達到運動功能,滿足傳動要求。
圖2-4 方案4 運動結構件示意圖方案5-6 連桿注射機構及曲軸連桿進給機構注射成型機構由鉸鏈四曲柄機構和手柄滑塊機構串聯組成。 可以根據沖程率的變化系數對四桿機構進行圖形化設計,然后選擇曲軸長度和導軌位置,并根據要求確定鉸點位置工作段接近勻速。 如果規格選擇得當,機構傳動角能滿足預制構件在工作段運動時的要求,壓力角小。 曲軸進給機構的曲軸通過蝸桿機構與曲軸相連。 如果根據機構的運動循環圖確定曲軸轉角及其從動件的運動規律,則機構可以在預定的時間將型腔送到加工位置。 4、方案分析與評價 前面5個方案提出后,小組進行了比較,發現每個方案由不同的地基組成,均能完成設計要求的運動。 并且考慮到機制的性能、處理成本以及后期建模分析的便利性,團隊經過討論最終決定采用方案四。 分析:方案一貌似可以完成設計要求的運動,穩定性不高。 可延長二次機構加壓時間,效率高,結構簡單,裝配更容易; 一級傳動角小,不利于注塑成型。 方案三比以上兩種方案更穩定,傳輸角度更大; 且結構過于復雜,不利于加工,成本較高。 選項五在結構上也過于復雜。 事實上,曲軸可以很容易地設計輪廓曲線,使其滿足預定設計要求的運動規律,但曲軸與從動件之間的點接觸或線接觸容易生銹。
但在設計要求中,該機構每分鐘必須生產90件,該機構的運轉速度相對較高。 且其上模滑塊總質量為40kg,最大生產阻力為5000N,對其機構的傳動性能有要求,曲軸機構不適用于傳遞力過大的場合。 因此我們選擇第四個選項。 而且,第四種方案可以滿足快速返回運動的要求,工作臺上輸送調味料和上模注塑兩個工步也可以輕松協調。 使整個機構完成一個加料注射循環。 五、機械傳動系統和變速機構的速比 1、沖壓機構的傳動比 由于電動機的大小為1KW-730r/min,精壓機每分鐘必須生產90個產品。 據估算,機構需要的周期T=2/3s,角速度W1=3π; 電機的W2=π。 注塑機構總傳動比:iA=W2/W1=設初級傳動比i1=4,次級傳動比i2=2。 一次傳動是注塑機構中電機與中間蝸桿之間的傳動比,二次傳動是注塑機構中中間蝸桿與傳動蝸桿之間的傳動比。 2、送料機構的傳動比由于送料機構要與注塑機構保持相同的運動周期,所以其傳動比應與注塑機構的總傳動比一樣大:iB=W2/W1=所以我們也可以選擇相同的一級或二級傳動比:i1=4,i3=2。 一級傳動是電機與中間蝸桿的傳動比,二級傳動是中間蝸桿與進給機構傳動蝸桿的傳動比。
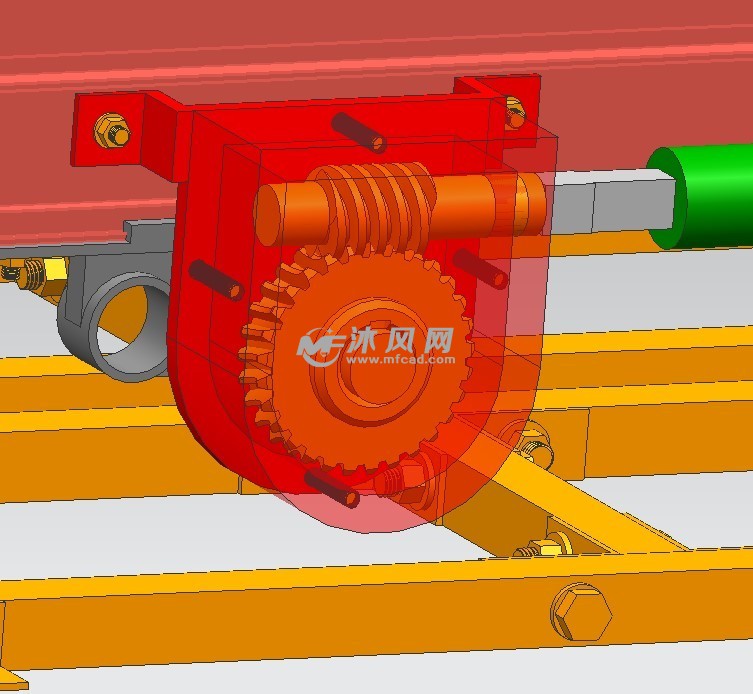
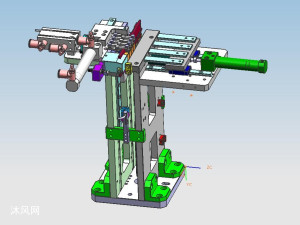
六、執行器運動規格估算 圖6-1 設計規格示意圖 1、上模注塑機構規格設計:由于上模注塑機構采用曲柄滑塊傳動機構,并且速比必須小于等于。 取k=,則θ=52要求上模射出總行程為280mm,則模錘最低點到最高點的距離CD=H/(2*sin26)=160mm; 取AB=250mm,則可計算:AC=250/(sin26)=570mm。 2、傳動系統的規格設計:i=Z2/Z1=D2/D1=,設初級傳動比i1=4,次級傳動比i2=2; 則中間蝸桿的角速度為6π,取模數m=2; z1=50, z2=100; 估計d1=100,d2=200mm; 送料機構傳動蝸桿參數均與注塑機構相同。 因此,d3=d1=100,z3=z1=50; 沖程速比為θ=52度; 并且最大送料距離也是200mm,所以可以推算出HG=175mm,GF=75mm,H勾勒出即將到來的整體根據設計規范的要求,畫出最終的結構、運動、結構和配光圖7-1 整機機構示意圖 右圖為3D模型示意圖 某一時刻機構的速度和加速度分析: 圖9-1 注射機構立即運動 圖7-2 送料機構立即移動 圖9-1中的注射機構處于上模的最低位置。
排量最大,速度如圖9-2。 此時送料機構應達到最大位移,等待上模加工。 滑塊向右有一個速度,因為機構是勻速運動,加速度為0。朱力。 機械原理[M]. 上海:高等教育出版社,2008:15-200 [2]鄒慧君. 機械原理課程設計[M]. 上海:高等教育出版社,2009:15-250 第十一期設計總結 經過一周的努力,在老師的帶領下,我終于完成了機械設計課程的設計。 在這次任務中,我遇到了很多困難。 一次次的估算,一次次的設計變更,暴露了我前期在這方面知識和經驗的不足。 但是,重要的是,通過這次課程設計,我有很多感慨和收獲。 首先,我對機械原理這門課程有了更深的理解。 我通常只是處于初級的感性認識階段,對所學的具體原理和應用問題沒有真正的理解,在設計過程中總是在問為什么以及如何解決。 理論有深刻理解。 在這個設計過程中,如何將所學的理論應用到實踐中是我們的目的。 這也是我們畢業后必須具備的能力,可以為以后的學習和工作積累寶貴的經驗。 據悉,我對繪畫的掌握程度提高了; 、proe、Word,這些只是必須掌握的工具和軟件。 對我來說,最大的收獲是技能和能力。 這些分析和解決問題的技能和能力。 在整個過程中,我發現像我們這樣的中學生最缺乏的是經驗,沒有感性認識,更缺乏理論知識。 這是一個很大的問題,需要我們把所學的所有相關知識系統地聯系起來,暴露出自己的不足,需要改進的地方。 有時候一個人的力量是有限的。 相信結合群眾的智慧什么是機械運動簡圖,我們的作品會更加完美! 課程設計告一段落。 今后,我一定會以這樣的心態面對未來的學習,以更加細膩的熱情投入到學習和工作中,做一個不斷探索、敢于創新的大學生。