MOS管電樞驅動振蕩現象的原因及解決方法-管
MOS管基極驅動振蕩
電源由于具有開關速度快、驅動功率低、幀率低等優點,已廣泛應用于中小容量晶閘管。
當采用功率橋拓撲時,同一橋臂上的兩個功率元件在轉換過程中,載波驅動信號會產生振蕩,此時功率元件的損耗較大。 當振蕩幅度較大時,功率元件將導通,從而導致功率開關管被擊穿。
目前常用的解決方案是在關斷時對集電極施加反壓,以減弱振蕩的影響,但反壓電路占用空間,降低成本。
在深入分析基礎振蕩形成機理的基礎上,設計了硬件驅動電路。 理論分析和實驗結果表明,采用本文提出的方法,只需減少元件數量就可以最大程度地抑制振動。
電樞驅動信號振蕩的形成機制
從電源的等效電路可以看出,三極之間有結電容,集電極輸入相當于電容網絡,驅動電路有分布電感和驅動電阻。 此時橋式逆變電路如圖1所示。
以上述晶體管導通過程為例,當下晶體管V2已經完全截止時,柵極和源極處于相同電位。 在上管開通過程中,設上管開通時間為ton,直流母線電流為E,因為開通過程時間很短,漏源電流很快從直流母線電流上升到接近零,相當于下管V2的漏源電流,極間突然加入電流E,產生很高的dv/dt。
dv/dt值與上管V1的開通率有關,可近似為
圖1 半橋拓撲等效電路
此時,即使下管已經完全關斷,由于結電容Cgd2的存在,dv/dt也會對柵源狀??態產生影響。
從上式可以看出,當上管導通時,下管基極會形成阻尼衰減振蕩信號,如圖2所示。同樣,當上管關斷時,下管基極會形成阻尼衰減振蕩信號。下管導通,上管基極也會振蕩,但相位與后者相反,其振幅可表示為
由于振蕩頻率很高,處于高頻開關狀態,導致開關損耗很大。
更嚴重的是,如果振蕩幅度達到閾值電流,下管將導通,而上管處于導通狀態。 此時會導致上下功率管直通現象,造成嚴重損壞。 上述現象可以通過調整驅動電路的參數來抑制。
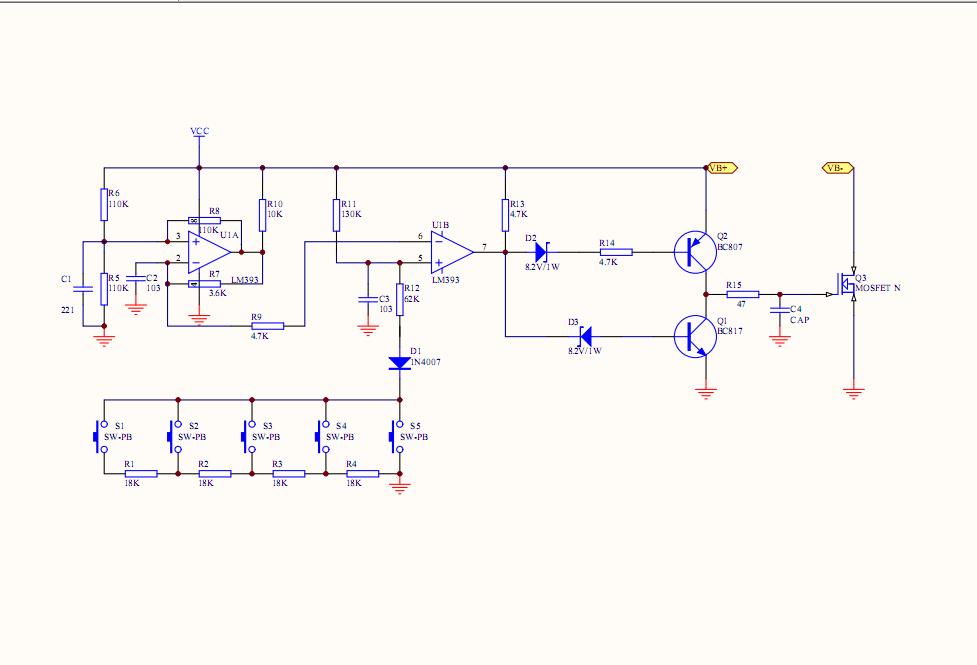
圖2 基極振蕩干擾實測波形
驅動電路的改進降低了分布電感。 如果取極限情況,驅動電路的分布電感為零,則驅動信號由式(3)簡化為如下方式
式中短路電流過大的危害,S=。
從上式可以看出,此時振蕩已經轉變為指數衰減模式,并且在t=0時為最大值
從上面的分析可以看出,分布電感主要影響驅動信號振蕩的瞬態性能。 如果分布電感最小化,驅動信號將從減振振蕩轉變為指數衰減,從而可以消除高頻開關損耗。 同時,也可以在一定程度上減小振蕩幅度。
因此,在設計電路時,盡量使驅動芯片靠得很近,并減少閉環所包圍的面積。 如果通過電線連接,應使用雙絞線或同軸電纜,以盡量減少分布電感。
開通和關斷時間的協調和調整由式(5)和式(8)可以看出,開通時間是影響驅動信號振蕩幅度的主要因素,即成反比。
如果適當減少元件的導通時間,可以很大程度上減小振蕩幅度。 因此,考慮在驅動芯片與基極之間添加緩沖電路,即人為串聯驅動電阻,在柵極與源極之間并聯一個電容。 延長基極電容的充電時間,提高電流變化率。
但關斷時間和開啟時間之間存在一定的矛盾。 如果簡單地減少開啟時間,則關閉時間也必須減少。 從減少死區時間的角度來看,關斷時間預計會更短,因此考慮調整開通時間。 和休息時間;
為了減少dv/dt的偏轉,減少基極的充電時間,關斷時間應較短,以便在開啟和關閉時使用較短的時間常數。 較短的死區時間可降低輸出波形的紋波集中度。 電路如圖3所示。
通過上述措施,可以在保證較短的關斷時間的同時,減少導通時間并降低電流變化率。
圖3 改進后的驅動電路
理論上,開通時間越長,dv/dt偏轉越小,振蕩引起的干擾影響越不明顯,開關損耗近似公式
式中:f為工作頻率。
由于它一般工作在幾十kHz的開關狀態,其充放電電壓由柵源電容和驅動電流決定。 如果驅動器內阻選得較大,則電路損耗過大,不利于驅動電路的安全運行。 綜合考慮內阻和電容的值。
通常,驅動內阻的電阻為幾十個8,柵源并聯電容的值根據公式(10)確定。
其他措施考慮到驅動信號振蕩主要發生在橋臂兩側的關斷階段,即柵極和源極均為零電位時,由于PNP二極管的工作原理,需要外接一個PNP驅動芯片與驅動內阻之間連接有二極管。 當驅動芯片提供高電平時,二極管不導通,不影響電路邏輯。
在驅動芯片提供低電平的過程中,當沒有形成振蕩時,二極管的柵極和基極電位近似為零,二極管不工作; 通過,振蕩電流通過反并聯晶閘管和二極管快速泄放,避免了欺詐性通信。
同時,柵極和源極之間并聯了穩壓管,進一步限制柵極和源極的缺相。 最終改進后的驅動電路如圖3所示。
圖4是在沒有緩沖電路的情況下工作頻率f為40kHz時基頻驅動信號的實測波形。 此時驅動芯片直接連接到基頻。 由于沒有考慮分布電感的影響,芯片距離放置位置比較遠。
實際測量驅動電路的分布電感L為135nH,驅動器內阻近似為零。 從圖4可以看出,改進前的振蕩幅度很大,導致發熱嚴重,直至過熱損壞逆變器。 正常工作。
改進驅動電路后,實測分布電感L為23.5nH,驅動內阻Rg取30Ω,并聯電容C取0.01μF。 實測載波驅動波形如圖5所示。可以看出,改進電路很好地解決了基極驅動信號的振蕩問題。
圖4 改進前的驅動信號波形
圖5 改進后的驅動信號波形
推理
橋式拓撲功率在開關轉換過程中的直接現象是由于結電容、驅動電路的分布電感以及開關過程中形成高dv/dt而在基極形成振蕩。
在分析了電樞驅動信號的振蕩機理后,對驅動電路進行了優化設計短路電流過大的危害,在柵極和源極處減少了緩沖電路。
與外加負電壓電路和有源驅動電路相比,該電路具有實現簡單、安全可靠的特點。 該驅動電路所實現的燈管在常年工作中未出現過熱或損壞的情況。