4. 組織機構
1. 制度分析的常用方法
2 基本結構設計
3 組合機構分析與設計
4. 機構參考圖例
1. 制度分析的常用方法
(1)組織自由度分析
一、常用術語的概念
(1)常用術語概念:表4-1-1、P4-3
(2)運動副的分類:表4-1-2、P4-3
2、機構運動圖及操縱圖
(1)如何繪制機構運動圖:表4-1-3、P4-4
(2)機構動作圖(圖形)符號(GB/T 4460-2013):表4-1-4、P4-5
3、組織自由度分析
(1)平面機構自由度分析:P4-9
(2) 單閉環空間機構自由度計算
A.平面機構自由度分析示例:表4-1-5、P4-10
B、計算F時的注意事項:表4-1-6、P4-11
C、單閉環機構公共約束數M的確定:表4-1-7、P4-12
D、采用框架切割法確定單閉環空間機構的M:表4-1-8、P4-13
(3)多閉環空間機構和開環機構的自由度計算:P4-14
(4) 空間機構自由度計算示例:P4-14
4.平面機構的結構分析
1、平面機構的組成及結構分類:表4-1-9、P4-16
(2)平面機構運動分析
(1)平面機構運動分析方法比較:表4-1-10、P4-17
矢量圖法、解析法、瞬時中心法、線圖微積分法、實驗法
1、機構位置及構件上某一點的軌跡分析
2、機構速度和加速度分析
(1)矢量圖解法
A、矢量圖形法求解機構軌跡的方法:表4-1-11、P4-18
B、矢量圖形法求解機構運動的步驟和方法:表4-1-12、P4-19
C、幾種常用絲杠機構的速度、加速度矢量方程:表4-1-13、P4-19
D、III、IV多桿機構速度、加速度矢量方程:表4-1-14、P4-22
(2) 分析方法
A.解析法求解機構運動的步驟和方法:表4-1-15、P4-24
(3)即刻心法
A、三種常用四桿機構運動分析公式(1桿為原始運動部件):表4-1-16、P4-25
B、III、IV類機構運動分析的分析方法:表4-1-17、P4-28
C、幾種常用機構的瞬時中心位置和部件速度:表4-1-18、P4-29
3、高級副職機構變動分析
(1)使用高并行低代方法求解:P4-29
(2)利用高層機制直接求解:P4-30
(3)平面機構受力分析
1、桿組及部件慣性力靜定條件計算:表4-1-19、P4-33
2、運動副摩擦力的計算:表4-1-20、P4-34
3 機構受力分析
(1)圖形計算方法:表4-1-21、P4-35
(2) 用速度杠桿法求平衡力F_{p}:表4-1-22、P4-37
(3)機構動靜態分析方法:表4-1-23、P4-37
4、慣性力的平衡
(1)不規則形狀旋轉部件平衡重力的確定:表4-1-24、P4-39
(2)平面機構平衡:表4-1-25、P4-39
(4) 單自由度機械動力學分析
1、機械的運動過程及運動方程:P4-43
2. 求解機器運動方程:P4-43
3、機器周期性速度波動的調整及飛輪設計:P4-43
A、機器運動方程:表4-1-26、P4-44
B. 運動方程應用舉例:表4-1-27、P4-46
(1) 機床主軸平均角速度{m}及速度不均系數δ:P4-48
(2) 飛輪設計:P4-48
A、各類機械允許速度不均勻系數δ:表4-1-28、P4-49
B、飛輪尺寸的確定:表4-1-29、P4-50
4.機械效率的計算
(1) 傳動機構不同連接方式時的總效率及特性:表4-1-30、P4-51
至 4-51
2 基本結構設計
(1)平面連桿機構
1、四桿機構結構形式:表4-2-1、P4-52
2.根據傳動角度設計四桿機構
(1)按照最小傳動角有最大值的條件設計曲柄搖桿機構:P4-53
(2)根據最小傳動角:P4-54設計行程速比系數k=1({12}=180°)的曲柄搖桿機構
(3) 根據最小傳動角取最大值的條件設計偏置曲柄滑塊機構:P4-55
(4)按最小傳動角設計雙曲柄機構:P4-55
3、根據輸入桿和輸出桿的位置關系設計四桿機構。
(1)幾何法
A、旋轉極、等視角關系及相對旋轉極:P4-56
B、采用相對極點法合成四桿機構,使輸入、輸出元件滿足三種對應位置關系:表4-2-2、P4-57
C、采用相對極點法合成四桿機構,使輸入、輸出桿滿足四種對應位置關系:表4-2-3、P4-58
(2) 分析方法:P4-60
(3) 實驗方法:P4-63
4、根據連桿位置和連桿點位置綜合鉸鏈四桿機構。
(1) 具有三個已知連桿位置的綜合鉸鏈四桿機構:表4-2-4斜面機械效率特點斜面機械效率特點,P4-63
(2) 具有四個已知連桿位置的綜合鉸鏈四桿機構:P4-64
(3) 點曲線和圓心曲線:P4-65
(4)連桿位置已知的綜合鉸鏈四桿機構:P4-65
(5)軌跡合成:P4-67
(6) 同等機構及其應用:P4-70
(7) 直線運動機構:表4-2-5、P4-70
(2)瞬時中心線機構和互包絡機構
1、瞬時中心線機構的工作特性及設計計算一般原則:P4-71
2.非圓齒輪節線設計
(1) 非圓齒輪節線設計,再現給定自變量的函數
A. 重現給定自變量函數的非圓齒輪節線設計:表 4-2-6,P4-73
B、8種典型非圓齒輪節線曲線和5種典型非圓齒輪齒條、小齒輪節線曲線計算公式:表4-2-7、P4-75
(2)共軛偏心圓齒輪和非圓齒輪:表4-2-8、P4-76
(3)橢圓-橢圓齒輪及橢圓齒輪傳動
A、橢圓-橢圓齒輪及橢圓齒輪傳動計算表:表4-2-9、P4-78
B、橢圓積分數值表 E=int_{0}^{Pi/2}sqrt{1-K^{2}sin^{2}}d:表 4-2-10、P4-79
3、互包絡機構工作特性:P4-80
4、互信封機制設計
A、互包絡機構設計計算公式(運動學法):表4-2-11、P4-81
B、互包絡機構設計計算實例:表4-2-12、P4-82
(3)凸輪機構
1.凸輪機構的術語和一般設計步驟
(1)術語和符號:表4-2-13、P4-84
(2)半凸輪設計步驟:表4-2-14、P4-84
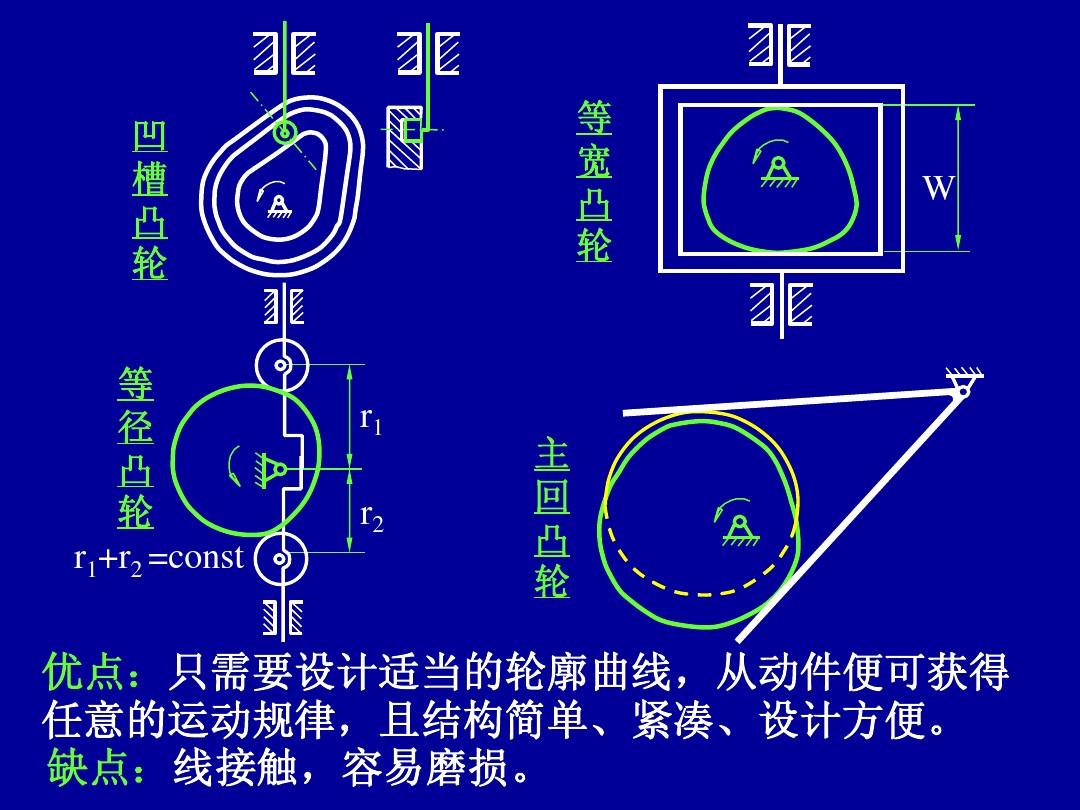
2、凸輪機構的基本型式及關閉方法
(1)凸輪機構的基本類型及特點:表4-2-15、P4-85
平面凸輪機構、空間凸輪機構、從動式
(2)凸輪機構關閉方式:表4-2-16、P4-87
3、凸輪機構壓力角:表4-2-17、P4-88
4.基圓半徑R_{b}、圓柱凸輪最小半徑R_{min}、滾子半徑R_{r}
(1)基圓半徑R_{b}對凸輪機構的影響:表4-2-18、P4-89
(2)基圓半徑R_{b}和R_{min}的確定方法
A、用畫圖法求圓盤凸輪R_{b}的一般方法:表4-2-19、P4-91
B、凸輪與軸的連接方法及R_{b}、R_{min}的計算公式:表4-2-20、P4-92
(3)滾子半徑R_{r}的確定
5.從動件運動規則和方程
(1) 跟隨者移動規則
A、凸輪機構各種運動模式比較:表4-2-21、P4-93
加速間斷運動、Ⅰ雙停運動、Ⅱ不停運動、3單停運動
(2) 基本運動規律參數曲線
A、基本運動規則參數曲線:表4-2-22、P4-95
B. 基本運動定律方程:表4-2-23、P4-96
(3)常用組合運動定律方程的應用
A、常用的組合運動規律方程及其比較和應用:表4-2-24、P4-97
B、常用多項式運動定律方程:表4-2-25、P4-101
C、非對稱加速度多項式運動規律方程:表4-2-26、P4-101
D、根據指定的特殊邊界條件建立多項式運動定律方程示例:表4-2-27、P4-102
E、停止、推動、返回、停止運動規律方程舉例:表4-2-28、P4-102
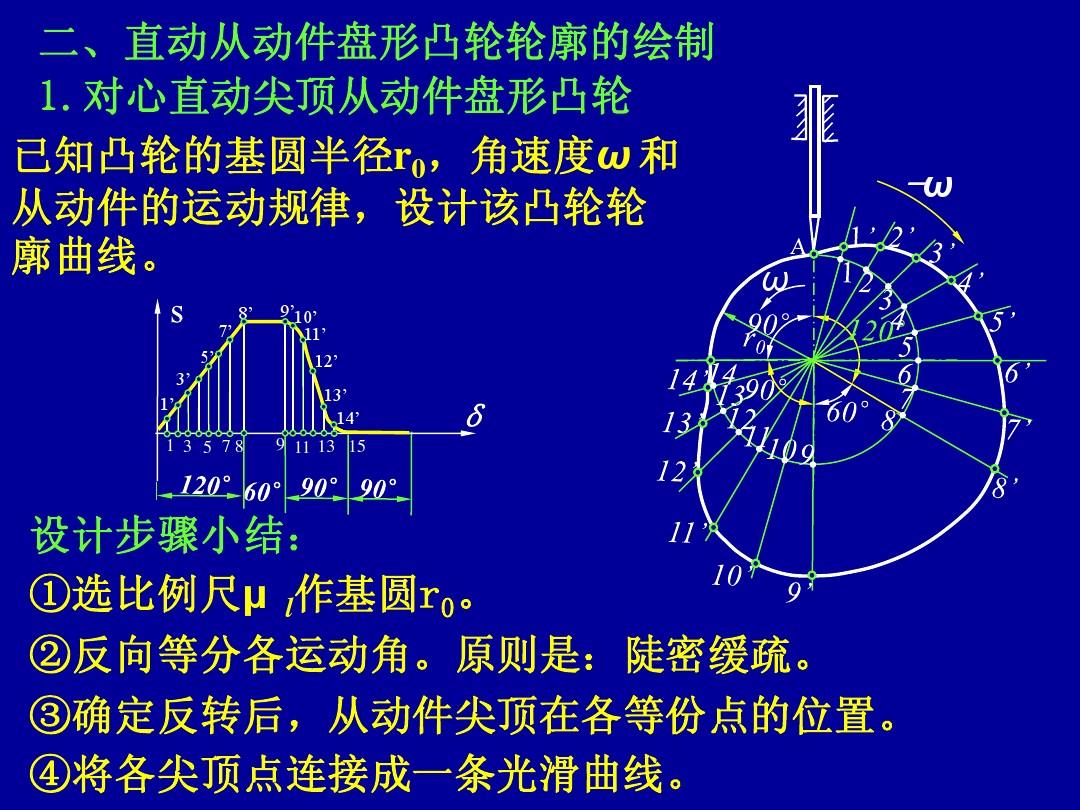
6、滾子從動凸輪工作輪廓設計
(1) 繪制方法
A、直線或擺動滾子從動件盤形凸輪工作輪廓設計:表4-2-29、P4-103
B、軸向直線及擺動從動件圓柱凸輪工作型線設計:表4-2-30、P4-104
(2) 分析方法
A、直線、擺動滾子從動件盤形凸輪工作輪廓線設計:表4-2-31、P4-105
B、共軛凸輪理論輪廓方程:表4-2-32、P4-106
7、平底從動盤凸輪工作輪廓設計
(1)直線直角平底從動盤凸輪基本尺寸的確定:表4-2-33、P4-111
(2) 固定從動件板形凸輪工作輪廓設計(繪圖法):表4-2-34、P4-112
(3) 直線平底、擺動平底從動件盤形凸輪工作輪廓設計(解析法):表4-2-35、P4-113
8、圓弧凸輪工作輪廓設計
(1)單圓弧凸輪(偏心輪)
A、單圓弧凸輪及其從動件運動參數計算:表4-2-36、P4-114
(2) 多圓弧凸輪
A、定義及接弧條件:表4-2-37、P4-114
B、中心作用直線滾子和直線作用直角平底從動件的四圓弧凸輪輪廓設計:表4-2-38、P4-115
C、三角凸輪工作輪廓設計:表4-2-39、P4-116
9、凸輪、滾子結構、材質、強度、精度、表面粗糙度、加工圖
(1)凸輪、滾柱結構:P4-116
A、托輥各部分尺寸參考數據:表4-2-40、P4-118
(2)常用材料
A、凸輪與從動輪接觸端常用材料、熱處理、極限應力{HO}:表4-2-41、P4-119
(3)強度校核及許用應力
A.強度校準公式(初始線接觸):表4-2-42、P4-119
(4)凸輪精度和表面粗糙度
A、凸輪公差和表面粗糙度:表4-2-43、P4-120
(5) 凸輪工作圖:P4-120
(4)分度凸輪機構
1、分度凸輪機構的性能及其運動參數
(1)幾種常用間歇分度機構的性能比較:表4-2-44、P4-122
(2)分度凸輪機構中主要運動參數的符號及含義:表4-2-45、P4-122
2.圓弧面(滾齒式)分度凸輪機構
(1)基本結構及工作原理:P4-122
(2)圓弧分度凸輪機構主要運動參數及幾何尺寸
A、圓弧分度凸輪機構主要運動參數及計算實例:表4-2-46、P4-124
B、圓弧分度凸輪機構主要幾何尺寸及計算實例:表4-2-47、P4-126
(3)圓弧分度凸輪工作面設計及實例計算
A、圓弧分度凸輪工作輪廓的設計計算:表4-2-48、P4-127
B、凸輪與轉盤對應角位置、機構角速度比、壓力角計算示例:表4-2-49、P4-128
C、凸輪工作面三維坐標x_{1}、y_{1}、z_{1}計算示例(參數同表4-2-49): 表4-2-50 , P4-129
(4)圓弧分度凸輪機構動力學計算
A、圓弧分度凸輪機構主要動態參數:表4-2-51、P4-129
(5)圓弧分度凸輪機構主要零件材料、熱處理及技術要求:表4-2-52、P4-131
(6)圓弧分度凸輪機構設計要點:P4-131
(7) 圓弧分度凸輪機構主要構成圖示例:P4-131
(8) 圓弧凸輪分度箱
A、GJC系列圓弧凸輪分度機構安裝結構尺寸:表4-2-53、P4-133
B、GT型圓弧凸輪分度機構:表4-2-54、P4-135
3. 圓柱分度凸輪機構
(一)工作原理及主要型號:P4-135
(2)圓柱分度凸輪機構主要運動參數及幾何尺寸:P4-135
A、圓柱分度凸輪機構主要運動參數及計算實例:表4-2-55、P4-136
B、圓柱分度凸輪機構主要幾何尺寸及計算實例:表4-2-56、P4-137
(3) 圓柱分度凸輪工作輪廓設計:表4-2-57、P4-138
(4)圓柱分度凸輪機構主要零件材料、技術要求及結構設計要點:P4-138
(5) 圓柱分度凸輪輪廓面展開為平面矩形時的設計計算:表4-2-58、P4-139
4.共軛(平行)分度凸輪機構
(1)基本結構及工作原理:P4-140
(2)共軛分度凸輪機構主要運動參數及幾何尺寸
A、共軛盤分度凸輪機構主要運動參數及計算實例:表4-2-59、P4-141
B、共軛盤分度凸輪機構主要幾何尺寸及算例:表4-2-60、P4-142
(3)用于用圖形繪制凸輪的理論輪廓和工作輪廓
A、共軛盤形分度凸輪廓線設計繪制方法:表4-2-62、P4-144
(4)共軛盤分度凸輪機構凸輪廓線解析計算:P4-145
A、共軛盤形分度凸輪廓線設計解析方法:表4-2-63、P4-146
B、凸輪與1、3號滾子嚙合的理論輪廓和工作輪廓:表4-2-64、P4-147
(5)共軛(平行)凸輪分度箱:表4-2-65、P4-147
(5)棘輪機構、溝槽機構、不完全齒輪機構、銷輪機構
1. 棘輪機構
(一)常用形式
A、棘輪機構的常見形式:表4-2-66、P4-148
B、棘輪摩擦面型式:表4-2-67、P4-149
(2)設計要點:表4-2-68、P4-149
2.滑輪機構
(1)工作原理及形式:P4-150
(2)滑輪機構幾何尺寸和主要運動參數計算(均勻分布徑向槽)
A、外滑輪機構和內滑輪機構主要參數計算:表4-2-69、P4-152
B、滑輪機構主要參數表(均勻分布徑向槽):表4-2-70、P4-154
C.滑輪機構的k和τ值:表4-2-71、P4-154
D、球面滑輪機構的幾何尺寸和運動特性:表4-2-72、P4-155
(3)滑輪機構動態特性:表4-2-73、P4-155
3、齒輪機構不完整
(1)基本形式及嚙合特性:P4-156
(2)設計參數計算:P4-158
A、從動輪鎖緊圓弧所跨越的完整循環數K與無齒頂干涉的主動輪最終齒頂高度系數h_{am}^{*}:表4-2-74、P4-159
(3)不完全齒輪機構設計計算公式及工作圖:表4-2-75、P4-161
4. 風車機構
(1)風車機構的主要類型及特點
A、針輪機構主要類型及特點:表4-2-76、P4-163
(2)風車機構設計計算
A、針輪機構幾何尺寸及運動參數:表4-2-77、P4-164
(6)傾斜機構和螺旋機構
1、斜面機構的特性指標及計算公式:P4-165
(1)斜面機構的特性指標及計算公式:表4-2-78、P4-166
2、螺旋機構
(1)螺旋機構特性指標:表4-2-79、P4-168
(2)絲杠機構傳動型式:表4-2-80、P4-168
3、參數選擇
(1) 升程角α參考值:表4-2-81、P4-169
(7)往復式油(缸)缸機構運動設計
1. 參數計算
(1)擺動油缸計算公式:表4-2-82、P4-169
2、參數選擇
(1)擺動油缸機構基本參數選擇:圖4-2-92、P4-171
3. 動作設計
(1)幾何法:表4-2-83、P4-171
(2)分析方法:表4-2-84、P4-172
至 P4-172
3 組合機構分析與設計
(1)基本機構主要組合類型:P4-173
1.系列組合
2、并聯組合
3、復雜組合
(2)凸輪連桿組合機構
1. 固定凸輪連桿組合機構:P4-174
2、移動凸輪連桿組合機構:P4-176
3、連桿凸輪連桿組合機構
(3)齒輪連桿組合機構
1、行星輪系與二級拉桿組組合機構:P4-179
A、單排內嚙合行星輪系-連桿組合機構計算:表4-3-1、P4-181
2、四桿機構與行星輪系的組合:P4-182
A、幾種具有停止特性的四桿鉸軸輪系組合機構:表4-3-2、P4-185
3、五桿機構與齒輪機構的組合機構:P4-187
A、五連桿鉸鏈機構與定軸齒輪系的組合:P4-187
B、五連桿鉸鏈機構與行星輪系復合組合機構:P4-189
(4)凸輪-齒輪組合機構
1、輸出部分凸輪齒輪組合機構實現周期變速運動:P4-190
2、凸輪-齒輪組合機構實現軌跡要求:P4-192
3.實現周期性停止的輸出凸輪齒輪組合機構:P4-192
(5) 柔性部件組合機構
1、正時皮帶連桿組合機構:P4-194
2、差速帶、鏈節組合機構:P4-194
A、差速帶、鏈節組合機構中各部件之間的運動學關系:表4-3-3、P4-195
至 P4-195
4. 機構參考圖例
(1) 勻速旋轉機構:P4-196
1、固定傳動比、勻速旋轉機構:P4-196
2. 分級傳動機構:P4-201
3、無級變速機構:P4-203
(2)非等速旋轉機構:P4-204
(3) 往復機構:P4-206
(4)緊急返回機構:P4-214
(5)行程放大機構:P4-216
(6) 可調行程機構:P4-218
(7) 間歇運動機構:P4-221
(8)超控停止及單向機構:P4-227
(9) 換向機構:P4-229
(10)差動補償機構:P4-232
(11)氣動、液壓驅動機構:P4-235
(12)增力夾緊機構:P4-239
(13) 實現預期軌跡的組織:P4-244
(14)安全保險及制動裝置:P4-250
(15)定位聯鎖機構:P4-255
(16)伸縮機構:P4-257
(17)振動機構:P4-260
至 P4-263