1. 三種基本彈性物體 1. 彈簧
1678年,英國物理學家羅伯特·胡克在實驗中發(fā)現(xiàn),彈簧的彈力F與彈簧長度的變化成正比,即F=kΔx,其中k為常數(shù),為彈簧的剛度系數(shù)。目的。 Δx和F都是矢量,這意味著彈簧在伸長和壓縮時會提供兩個不同方向的力,因此彈簧可以提供拉力或支撐力。 胡克的工作向人們介紹了彈性物體的實驗結(jié)果,為材料力學和彈性力學的發(fā)展奠定了基礎(chǔ)。
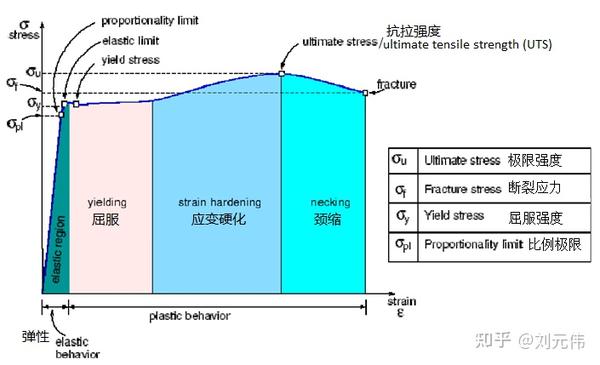
胡克之后,又進行了大量的工作不斷豐富這一理論: 1、只有當彈簧處于彈性變形范圍內(nèi)時,彈力才與變化量成正比。 當力超過一定值時,彈簧甚至會斷裂; 2、許多固體材料在一定的力范圍內(nèi),其力與變形之間存在線性關(guān)系; 3. 此外,還可以繪制材料的力和變形圖。 從受力到斷裂整個過程的應(yīng)力應(yīng)變曲線分為四個階段:彈性階段、屈服階段、應(yīng)變硬化階段和頸縮斷裂階段; 4、在實際工程設(shè)計和荷載驗證過程中,通常會留有足夠的余量,因此材料一般工作在彈性階段。
2. 桿
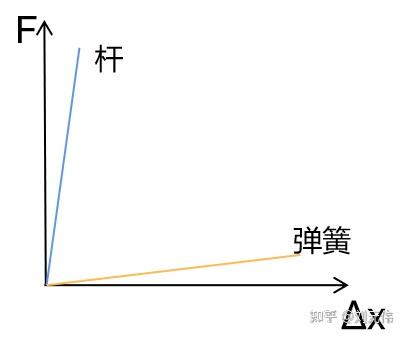
棒是上述固體材料的一種表現(xiàn)形式。 就像彈簧一樣,它既能提供拉力,又能提供支撐力。 當桿受到這些力的作用時,不可避免地會產(chǎn)生變形,因此拉力和支撐力本質(zhì)上都是彈性。 桿和彈簧之間的區(qū)別在于,當受到與彈簧相同的力時,桿變形很小。 換句話說,桿的“剛度系數(shù)”(更準確地稱為彈性模量)非常大。 圖片上的表現(xiàn)可能是:
另外,桿和彈簧的受力方向也不同。 由桿提供或接收的力可能不是沿著桿的方向。 也就是說,桿不僅能抵抗拉壓(沿桿的軸向力)、抵抗彎曲(垂直于桿的徑向力),而且還能抵抗扭轉(zhuǎn)。 (繞軸的圓周力)。 當然,高中物理不會考慮畸變。 請記住,作用在桿上的力不一定沿著桿。 實際問題常常涉及將力分解為沿桿的方向和垂直于桿的方向。
3.繩子
繩子是人類的一項偉大發(fā)明。 本來就脆弱的麻,捻成繩子后卻能承受很大的拉力。 當然,繩索在受到拉力時不可避免地會發(fā)生變形。 在一定范圍內(nèi),變形也可以認為與力的大小成正比。
與桿一樣,繩索的“剛度系數(shù)”很大,因此繩索受力時變形很小。
與桿不同,繩索只能提供拉力而不能提供支撐力,并且作用在繩索上的力的方向必須沿著繩索。
2. 剛性假設(shè)
前面我們提到,桿和繩的“剛度系數(shù)”非常大,在力-位移圖像中體現(xiàn)為一條斜率非常大的直線。 為了簡化問題(并使問題更容易表述),通常假設(shè)我們有一根剛性桿和一根剛性繩。 那么,什么是剛性桿和剛性繩呢? 桿和繩索的剛度假設(shè)如何簡化問題? 剛性假設(shè)引入了什么樣的約束?
經(jīng)過思考,我認為剛性桿和剛性繩的假設(shè)意味著:
“剛度系數(shù)”等于無窮大;
受力時,變形量等于0;
桿或繩上的每一點在沿桿或沿繩的方向上具有相同的速度;
如果拉力方向上的力F取為正,則剛性繩相當于一根滿足約束F≥0的剛性桿。
補充說明:假設(shè)3只是假設(shè)速度相等,但加速度不一定相等。 考慮在繩子或桿的牽引下進行圓周運動的情況。 此時,繩索上各點沿繩索方向的速度為0。但是,由于垂直于繩索的方向存在速度,因此沿半徑各點的向心加速度是不同的。
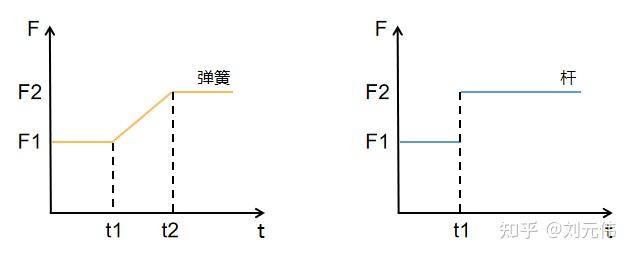
在這樣的假設(shè)下,我們提供給剛性桿和剛性繩的力可以在瞬間發(fā)生變化。 這就是力突變的問題。 下圖顯示了彈簧和繩索提供的力與時間的函數(shù)關(guān)系:
到目前為止,我們已經(jīng)介紹了三種基本的彈性物體,并介紹了剛度假設(shè)。 剛性桿、剛性繩和彈簧的受力特性總結(jié)如下表:
模型的力方向、力類型和力可以變異嗎?
剛性桿
不一定沿著桿
能夠承受緊張和壓力
力量可以變異
剛性繩索
沿著繩子
能承受拉力
力量可以變異
春天
沿著春天
能夠承受緊張和壓力
力量不能變異
由于剛繩的力必須沿著繩子的方向,并且可以變異,彈簧的力也必須沿著彈簧的方向,并且不能變異,所以它們經(jīng)常放在一起來分析(chu)和分析(ti)。 我們先來看看繩子和彈簧的突變。 直觀的動畫:

3. 例題
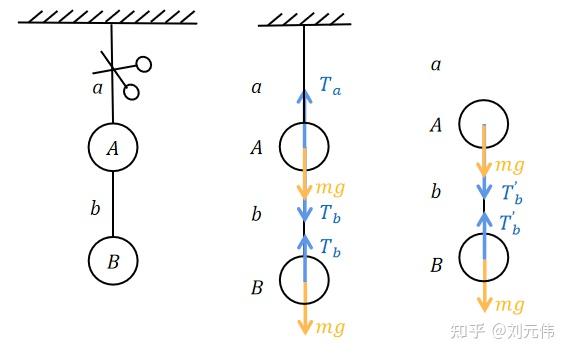
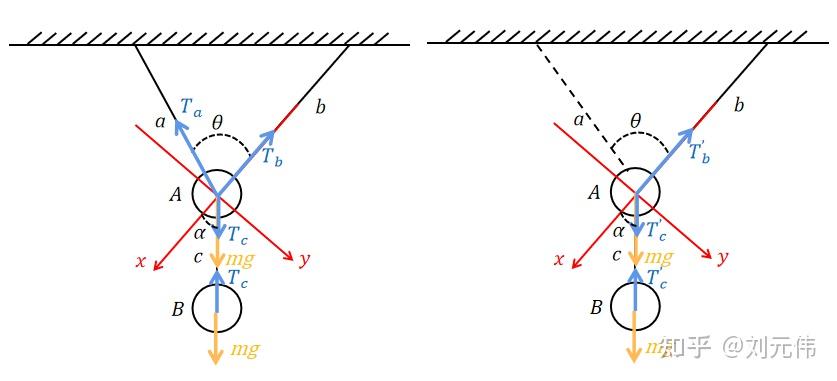
問題1:球A、B的質(zhì)量均為m。 初始力是平衡的。 當繩子a突然被切斷時,繩子b所受的力是多少?
這個問題的答案在上面的動畫中已經(jīng)給出了。 切斷a后,繩子b上的力為0。
但我們還是想用剛度假設(shè)來簡單推導(dǎo),建立初始狀態(tài)下的平衡方程。 我們有
T_{b}=mg\ T_{a}=T_{b}+mg
割斷繩子后,在假設(shè)條件成立的前提下建立牛頓第二定律方程(以垂直向下為正),有
mg-T_b^{'}=ma_B\ mg+T_b^{'}=ma_A
根據(jù)剛繩假設(shè),此時球A和球B都沒有水平速度,所以a_A = a_B,所以T_b^{'}=0,滿足T_b^{'}geq0的條件,是解到這個方程。
問題2:球A、B、C的質(zhì)量均為m。 它們最初是平衡的。 如果繩子a突然被切斷,求A、B、C的加速度。

與問題1相同的思路,我們建立球A、B、C在初始狀態(tài)和剪切后狀態(tài)的方程。
處于平衡狀態(tài)時有:
T_a = T_b + mg\ T_b = mg + \ = mg
切斷繩子 a 后,繩子 b 的力會發(fā)生變異,假設(shè)力變異為 T_b^{'} (滿足約束 T_b^{'}geq0)。 彈簧的力不能突然改變,所以仍然是F_。 球C上的力仍然平衡,加速度為0。
left{begin{array} { c } { { mg } + { T } _ { { b } } ^ { prime } = { ma } _ { { A } } } \ { mg + F _ { text { 炸彈 } } - { T } _ { { b } } ^ { prime } = { ma } _ { { B } } } \ { mg - F _ { 文本 { prime} } = 0 } end{array} left{begin{array}{c} {mg}+{T}_{{b}}^{prime}={ ma}_{{A}} \ 2 m g-{T}_{{b}}^{prime}={ma}_{{B}} end{array}right 。正確的。\
根據(jù)剛繩假設(shè),此時球A和球B都沒有水平速度高中物理彈簧長度與力,則a_A = a_B,所以T_b^{'}=0.5mg,滿足T_b^{'}geq0的條件,為這個方程的解。 所以a_A=a_B=1.5g,a_C=0。
問題3:最初,球在繩索a和b的拉力下保持平衡。 兩根繩子之間的角度為θ。 如果繩子a突然被切斷,問繩子b的力會發(fā)生什么變化。
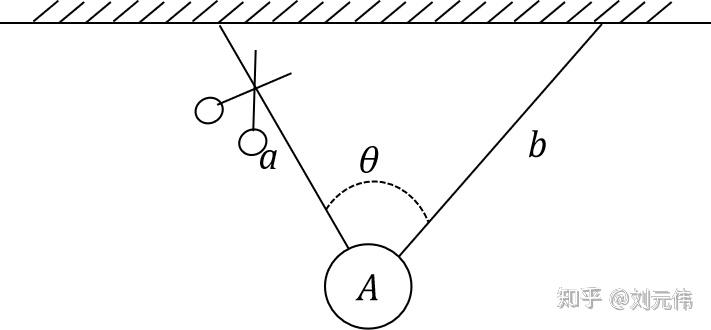
初始狀態(tài)下,球A在重力、繩索a的拉力和繩索b的拉力的作用下保持平衡。 切斷a繩后,a繩的張力瞬間消失。 因為角度的存在,此時A球無法保持平衡,必須有加速度。 球A加速度的大小和方向與繩索b突變的大小有關(guān)。 乍一看,繩子B的力的任何突然變化似乎都是合理的,但無論如何它已經(jīng)不平衡了。
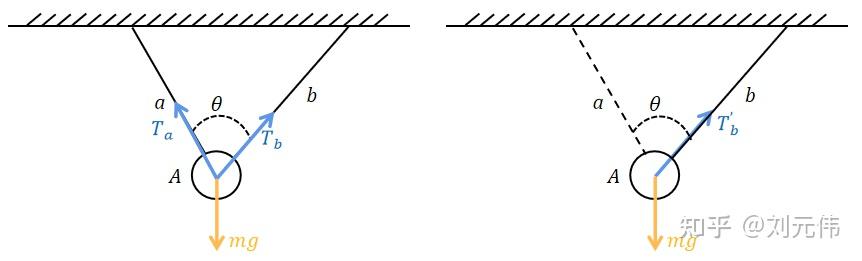
但根據(jù)剛繩假設(shè),球 A 在剪切瞬間的速度為 0,因此做圓周運動所需的向心力為 0,因此繩索 b 方向的加速度(向心加速度)為 0,即即,力沿繩索b的方向施加。 平衡。 鑒于此,我們不妨沿繩子b的方向和垂直于繩子b的方向建立坐標系,分別建立初始狀態(tài)和繩子a切斷后狀態(tài)的平衡方程和牛頓第二定律方程。
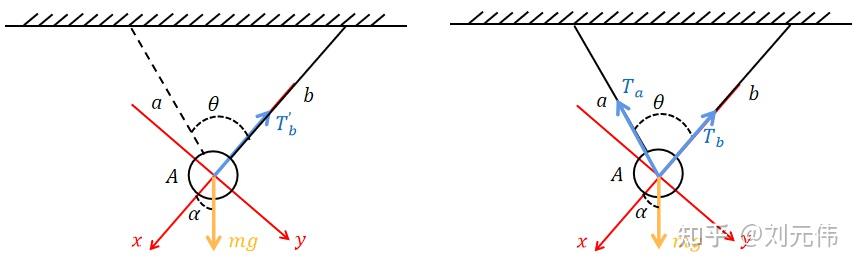
初始狀態(tài):
T_b + T_acostheta = mgcosalpha\ T_asintheta = mgsinalpha
剪斷繩子后:
mgcosalpha = T_b^{'}\ mgsinalpha = ma
因此,T_b^{'}=T_b+T_acostheta,要分析繩b前后張力的變化,只需看T_acostheta的情況即可。 顯然,當theta, 0">T_acostheta>0時,T_acostheta=0,T_b^{'}=T_b;當90^時。">theta>90^。 , T_b^{'};
問題4:球A、B的質(zhì)量均為m。 它們最初在繩索 a、b 和 c 的張力下保持平衡。 當a突然被切斷時,繩索b和c的張力發(fā)生變化。
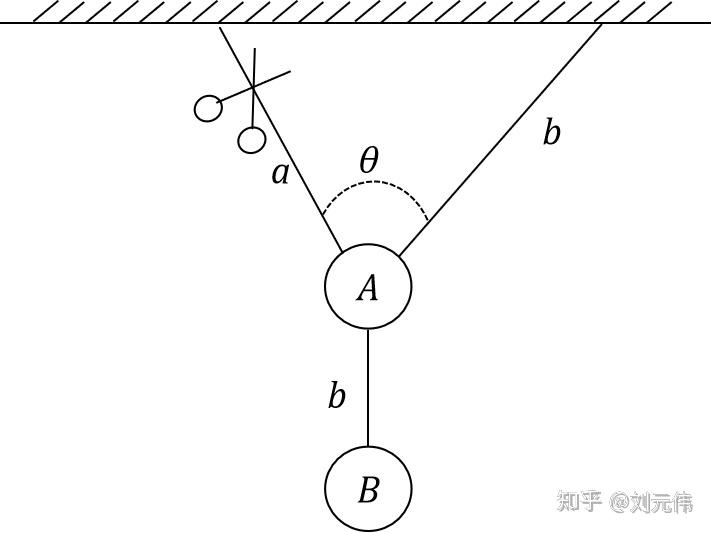
這道題是題1和題3的結(jié)合體,高中物理練習冊上沒有找到。 我不確定正確答案是什么。 下面的解法仍然采用剛性繩的假設(shè),然后得出最終的結(jié)論。 如果剛性繩的假設(shè)不正確,那么結(jié)論也將是錯誤的。
初始狀態(tài):
致A:
(T_c+mg)cosalpha=T_b+T_acostheta\ (T_c+mg)sinalpha=T_asintheta
致乙:
T_c=毫克\
切斷繩子a后,沿繩子b方向的力平衡。 原因與問題3相同,垂直于繩索b的方向有加速度:
致A:
(T_c^{'}+mg)cosalpha=T_b^{'}\ (T_c^{'}+mg)sinalpha=ma_A
致乙:
mg-T_c^{'}=ma_B\
對于與繩索c相連的兩個球,球A的加速度垂直于繩索b的方向,而球B的加速度只能沿著繩索c的方向。 要使繩索 c 滿足剛性繩假設(shè),只能是 a_B=alpha 。
首先確定繩索c的受力變化,即T_c^{'}與T_c之間的關(guān)系。
取決于
left{begin{array}{c} T_{c}=mg \ m g-T_{c}^{prime}=m a_{B} \ a_{B}=a_{A} cos alpha end{數(shù)組}right.\
必須
T_{c}-T_{c}^{prime}=m a_{A} cos alpha=2 T_{c} sin alpha cos alpha\
所以
T_{c}^{prime}=T_{c}-2 T_{c} sin alpha cos alpha=T_{c}(1-2 sin alpha cos alpha)=T_{c }(1-sin 2 alpha)\
因為 alpha inleft(0^{circ}, 90^{circ}right) ,所以 sin2alpha inleft(0, 1right) ,所以 T_c^{'} ,繩索 c作用在其上的力就變小了。
接下來分析繩子b更復(fù)雜的力變化,即T_b^{'}與T_b的關(guān)系。
一個已知的
left{begin{array}{c} left(T_{c}^{prime}+mgright) cos alpha=T_{{b}}^{prime} \ left (T_{c}+mgright) cos alpha=T_{b}+T_{a} cos theta end{array}right.\
和
left{begin{array}{c} T_{c}=mg \ T_{c}^{prime}=T_{c}(1-sin 2 alpha) end{array}right .\
所以
left{begin{array}{c} {[mg(1-sin 2 alpha)+mg] cos alpha=T_{{b}}} \ 2 mg cos alpha=T_ {b}+T_{a} cos theta end{array}right.\
所以
T_{{b}}^{prime}-T_{b}=[mg(1-sin 2 alpha)+mg] cos alpha-2 mg cos alpha+T_{a} cos theta=T_{a} cos theta-m g sin 2 alpha cos alpha
因此,繩索b上張力的變化將由θ角和α角的條件決定。 因為 alpha inleft(0^{circ}, 90^{circ}right) ,所以 sin2alpha inleft(0, 1right) , cosalpha inleft(0 , 1right),所以 α cosalpha 一定大于 0。此時,繩索 b 的張力保持不變的臨界角將不再等于 90 度,而是小于 90 度。
問題5:球通過一根長度為L的繩子懸掛在天花板上,它從高處開始下降。 懸掛點下方L/2處有一釘子。 分析一下,當球在正下方擺動,繩子撞到釘子時,繩子上會發(fā)生什么? 力量的變化。
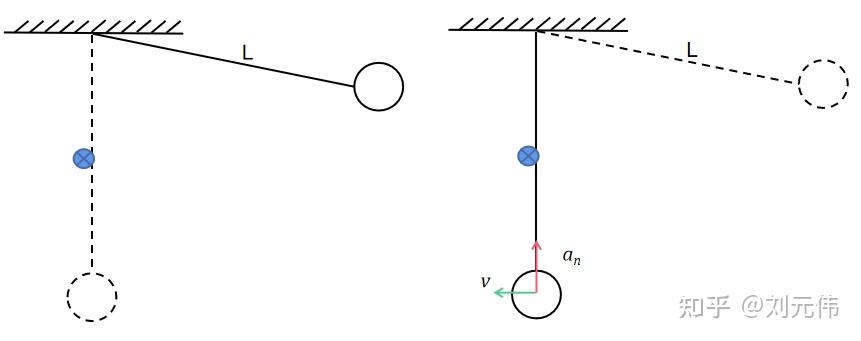
當球到達最低點時,它有速度v和向心加速度a_n,因為速度不能突然改變高中物理彈簧長度與力,但圓周運動的半徑從L變?yōu)長/2。 根據(jù)
a_{n}=frac{v^{2}}{R}\
此時,向心加速度突然變?yōu)橹爸档膬杀叮蛔兦袄K子所受的力為
T=mg+mfrac{v^2}{L}\
突變后繩子上的力為
T^{'}=mg+2mfrac{v^2}{L}\
擺模型張力的補充變化:
初始狀態(tài)下,球從開始擺動,在任意thetainleft(-,\right)處繪制拉力T的圖像。
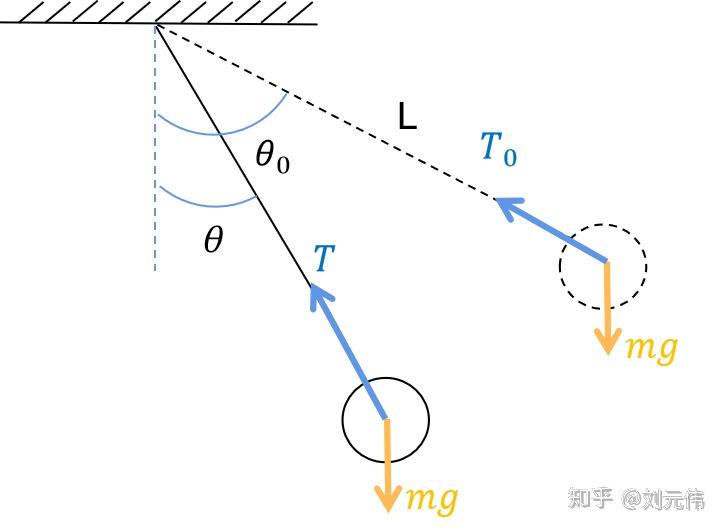
在處,受力分析為:
T_0=mgcos\
在θ處,力分析為:
T=mgcostheta+mga_n\
向心加速度
a_n=frac{v^2}{L}\
根據(jù)機械能守恒定律
mgleft(L cos theta-L cos {0}right)=frac{1}{2} mv^{2}\
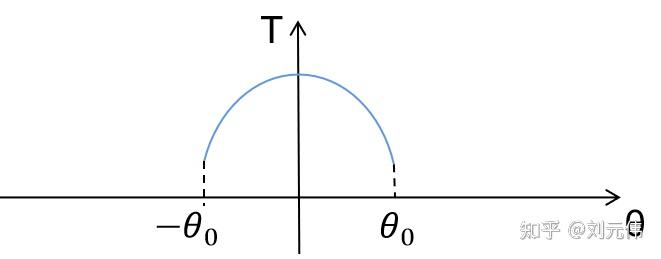
結(jié)合我們得到的四個方程
T=theta-\
函數(shù)圖為
4. 展開
第4題本身只是隨機抽簽。 初衷是想把它結(jié)合起來。 突然我意識到這是一個雙擺模型。 然后我想起了理論力學課上的場景,想把桿連接的雙擺模型的方程放出來。 供大家體驗。
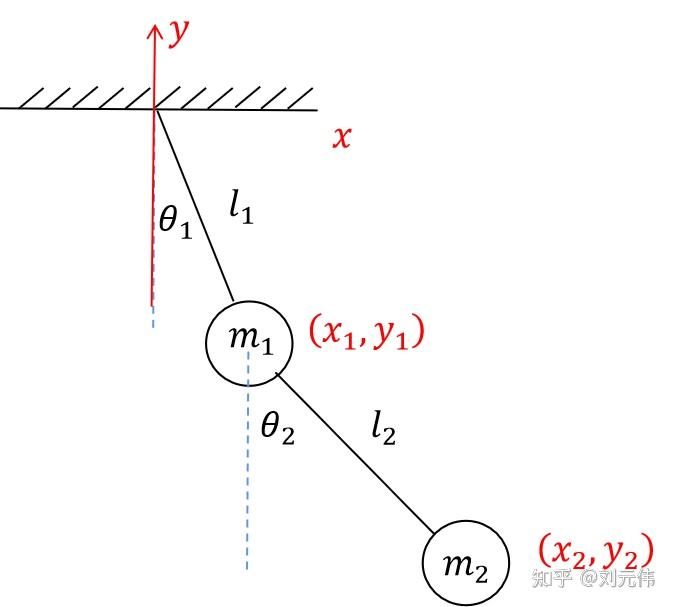
約束方程
left{begin{array}{c} x_{1}=l_{1} sin {1} \ y_{1}=-l_{1} cos {1} \ x_{2 }=l_{1} sin {1}+l_{2} sin {2} \ y_{2}=-l_{1} cos {1}-l_{2} cos { 2} end{數(shù)組}right.\
速度方程
left{begin{array}{c} dot{x}_{1}=dot{{1}} l_{1} cos {1} \ dot{y}_{1 }=dot{theta}_{1} l_{1} sin {1} \ dot{x}_{2}=dot{theta}_{1} l_{1} cos {1}+dot{theta}_{2} l_{2} cos {2} \ dot{y}_{2}=dot{theta}_{1} l_{1 } sin {1}+dot{{2}} l_{2} sin {2} end{array}right.\
勢能方程
V=+\
動能方程
{T}=frac{1}{2} {~m}_{1} {v}_{1}^{2}+frac{1}{2} {~m}_{ 2} {v}_{2}^{2}=frac{1}{2} {~m}_{1}left(dot{{x}}_{1}^{2 }+dot{{y}}_{1}^{2}right)+frac{1}{2} {~m}_{2}left(dot{{x}} _{2}^{2}+dot{{y}}_{2}^{2}right)\
根據(jù)拉格朗日方程
fracrvh7lpj{dt}left(frac{ L}{ dot{theta}_{i}}right)-frac{ L}{ {i}}=0 L=電視
最終的簡化形式為
left{begin{array}{c} left({m}_{1}+{m}_{2}right) l_{1} ddot{theta}_{1}+ {m}_{2} l_{2} ddot{theta}_{2} cos left({1}-{2}right)+{m}_{2} l_{ 2} dot{theta}_{2}^{2} sin left({1}-{2}right)+left({m}_{1}+{m} _{2}right) g sin {1}=0 \ {~m}_{2} l_{1} ddot{theta}_{2}+{m}_{2} l_{1} ddot{theta}_{1} cos left({1}-{2}right)-{m}_{2} l_{1} dot{theta} _{1}^{2} sin left({1}-{2}right)+{m}_{2} g sin {2}=0 end{array}right 。
根據(jù)這兩個偏微分方程,我們可以積分得到任意時刻和的值,從而知道兩個球的位置。 雙擺模型的運動大致是這樣的:

然而,這兩個微分方程受初始值的影響很大。 如果初始值稍有變化,球的最終軌跡就會完全不同。 這類對初始值具有敏感依賴性的系統(tǒng)稱為混沌系統(tǒng)。 下面的動畫展示了12個雙擺系統(tǒng)在不同初始值下的運動。
5. 后記
課堂上,為了便于分析問題,我們接觸到了很多理想的物體和狀態(tài),包括“同質(zhì)的、可以抽象為粒子”的小球、“光滑到能產(chǎn)生摩擦力”的塊體等。為0”,“受力后不發(fā)生變化”發(fā)生變形的剛體。 然而,世界上不存在理想的物體,甚至不存在確定的狀態(tài)。 我們生活的世界本身就是混亂的,我們也是混亂的一部分。 在這個世界上,你現(xiàn)在的每一個小舉動,都可能引領(lǐng)你走向不一樣的未來。
一想起來,萬千河山就起來了。