【知識(shí)回顧】bqa物理好資源網(wǎng)(原物理ok網(wǎng))
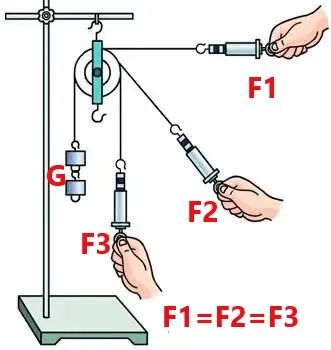
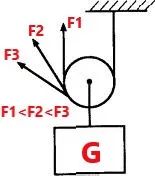
1、使用定滑輪的好處是可以改變力的方向,但不省力。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
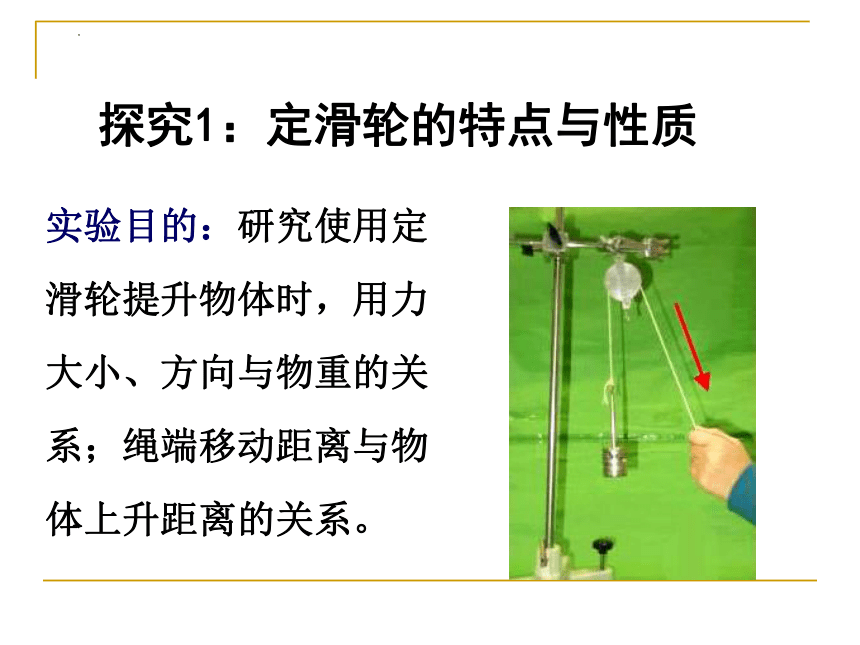
定滑輪實(shí)驗(yàn)場(chǎng)景bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
定滑輪圖bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
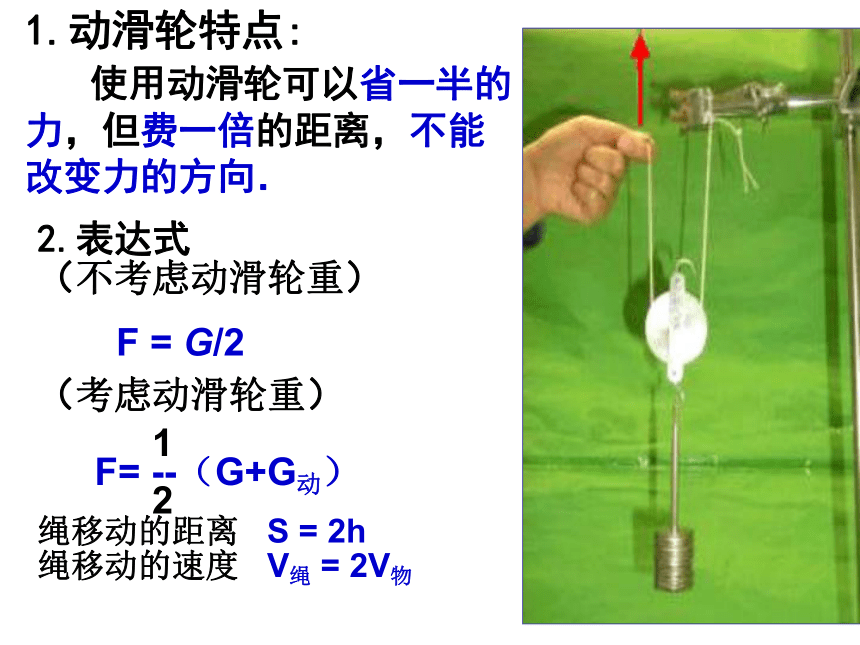
2、使用動(dòng)滑輪的優(yōu)點(diǎn)是可以省力,但不能改變力的方向。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
動(dòng)滑輪實(shí)驗(yàn)場(chǎng)景bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
動(dòng)滑輪示意圖bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
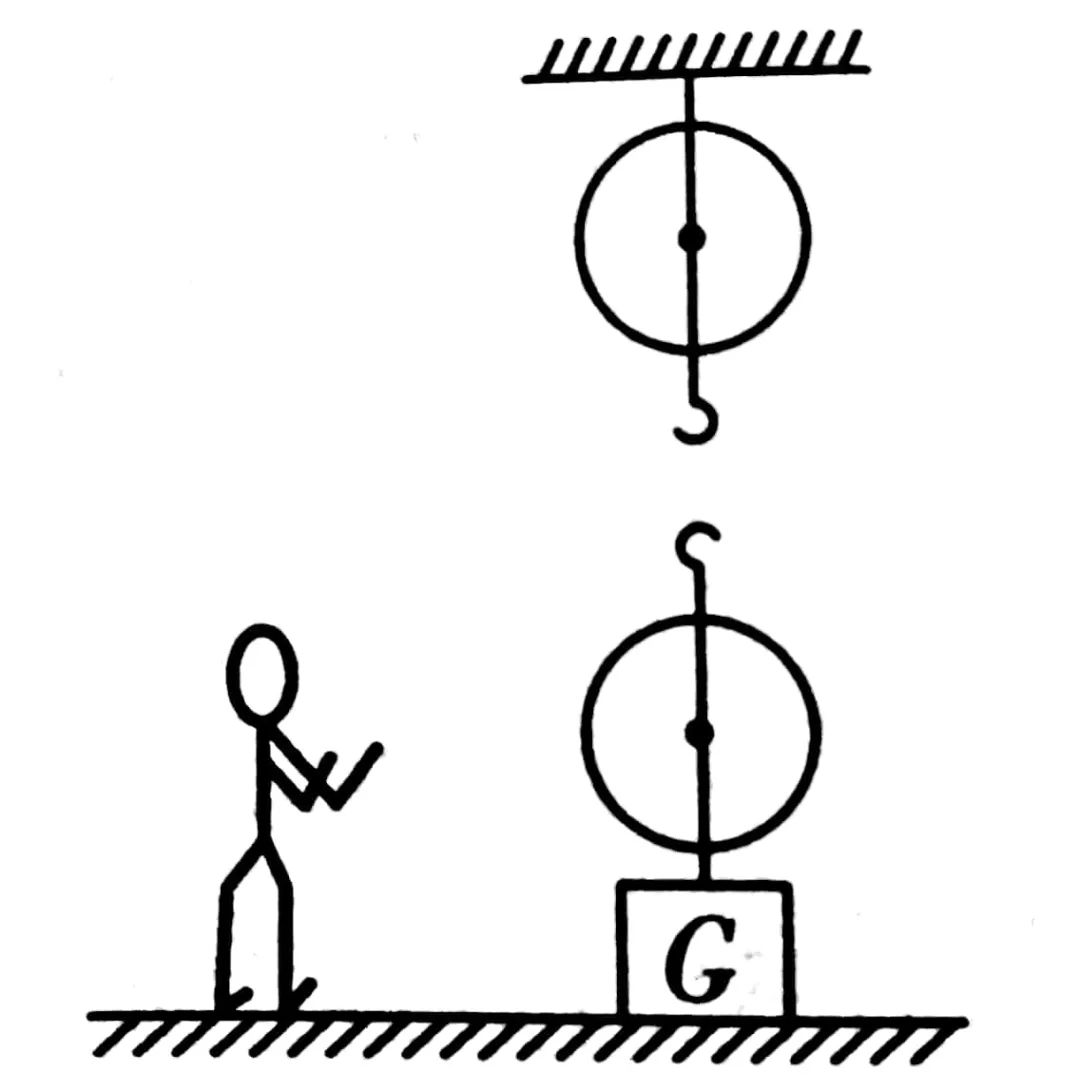
如果需要省力、改變力的方向,單獨(dú)使用定滑輪或動(dòng)滑輪是不能滿足人們的需要的。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
為了充分發(fā)揮定滑輪和動(dòng)滑輪的優(yōu)點(diǎn)并滿足人們的需要,將它們組合在一起形成滑輪組。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
【舉手提問】bqa物理好資源網(wǎng)(原物理ok網(wǎng))
1.什么是滑輪組? 它的優(yōu)點(diǎn)是什么?bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2、滑輪組繩子的纏繞方法怎么畫?bqa物理好資源網(wǎng)(原物理ok網(wǎng))
3、如何判斷滑輪組的拉力?bqa物理好資源網(wǎng)(原物理ok網(wǎng))
【新課學(xué)習(xí)】bqa物理好資源網(wǎng)(原物理ok網(wǎng))
一、滑輪組及其優(yōu)點(diǎn)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
1.滑輪組bqa物理好資源網(wǎng)(原物理ok網(wǎng))
人們把定滑輪和動(dòng)滑輪結(jié)合起來,利用定滑輪省力的能力和定滑輪改變力方向的能力,達(dá)到優(yōu)勢(shì)互補(bǔ)。 這樣組合的滑輪稱為滑輪組。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
實(shí)驗(yàn)滑輪組及示意圖bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2、滑輪組的優(yōu)點(diǎn)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
從實(shí)驗(yàn)和原理圖中可以看出,裝置中的動(dòng)滑輪有兩段繩索滑輪組,均分擔(dān)動(dòng)滑輪和鉤碼的重力。 定滑輪可以方便地改變拉力的方向。 這種組合發(fā)揮了定滑輪和動(dòng)滑輪的優(yōu)點(diǎn)。 因此,使用滑輪組的優(yōu)點(diǎn)是:bqa物理好資源網(wǎng)(原物理ok網(wǎng))
既可以省力又可以改變力的方向。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2、滑輪組的纏繞方法bqa物理好資源網(wǎng)(原物理ok網(wǎng))
滑輪組在使用過程中,有的需要省力,改變力的方向,有的需要省力,不改變力的方向。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
根據(jù)人們的需要選擇不同的纏繩方式。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
●最省力的繞繩方式bqa物理好資源網(wǎng)(原物理ok網(wǎng))
以由定滑輪和動(dòng)滑輪組成的滑輪組為例(如下圖所示)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
實(shí)驗(yàn)繞線法 拉絲繞線法bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
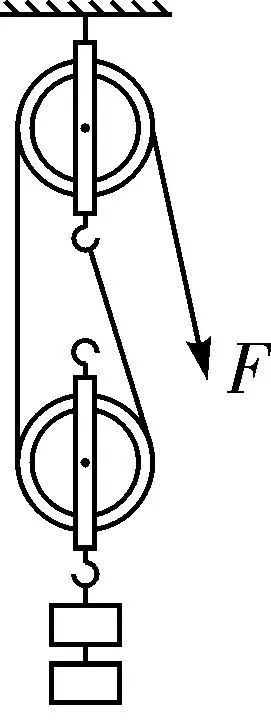
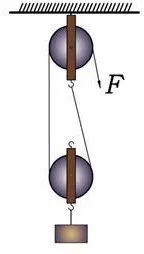
最省力的纏繞繩索的方法是將繩索的固定端掛在動(dòng)滑輪上。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
這樣就有三段繩子分擔(dān)物體和動(dòng)滑輪的重力。 即拉力為物體和動(dòng)滑輪重力的三分之一,即:F=G/3bqa物理好資源網(wǎng)(原物理ok網(wǎng))
若鉤碼升起高度為h,則三段繩需同時(shí)縮短h。 因此,繩索在自由端拉動(dòng)的長(zhǎng)度:S=3h。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
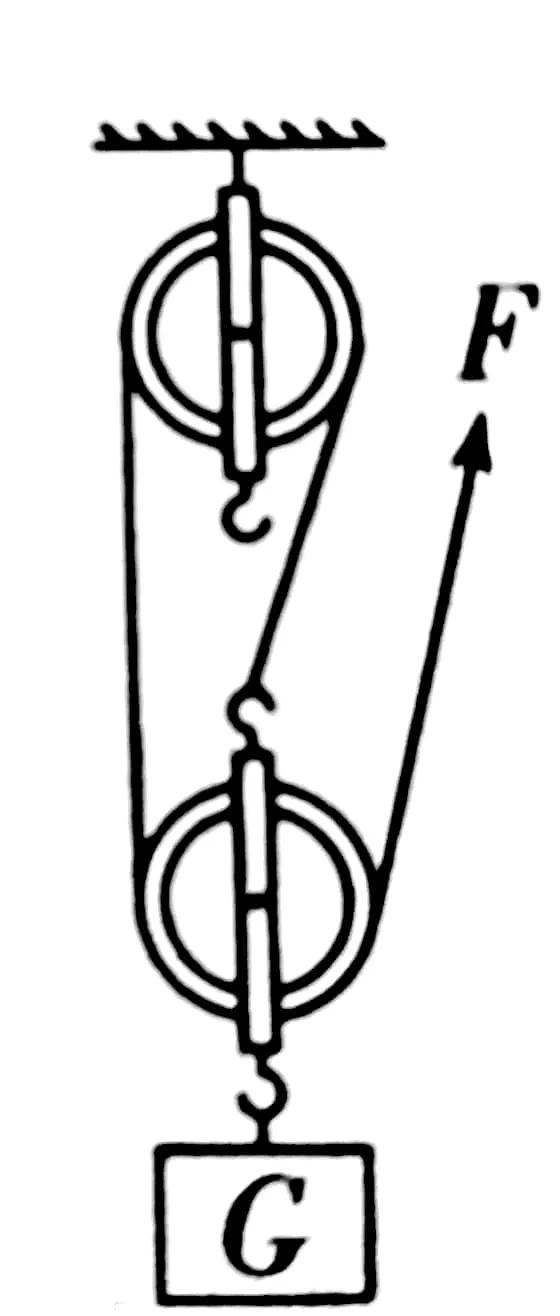
●繞繩方式改變力的方向bqa物理好資源網(wǎng)(原物理ok網(wǎng))
我們以一個(gè)由定滑輪和動(dòng)滑輪組成的滑輪組為例(如下圖所示)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
實(shí)驗(yàn)繞線法 拉絲繞線法bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
改變拉力方向的繞繩方法是將繩子的固定端掛在定滑輪上。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
這樣就有兩段繩子分擔(dān)物體和動(dòng)滑輪的重力。 定滑輪改變拉力的方向。 拉力為物體和動(dòng)滑輪重力的二分之一,即:F=G/2bqa物理好資源網(wǎng)(原物理ok網(wǎng))
若鉤碼高度為h,則兩段繩需同時(shí)縮短h。 因此,繩子自由端的長(zhǎng)度為:S=2h。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
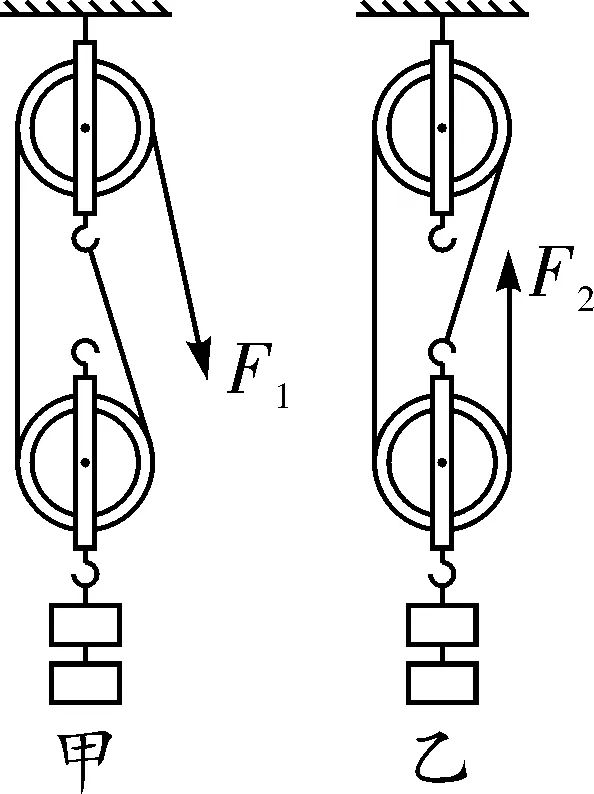
●同組滑輪最省力改變拉力方向?qū)Ρ葓Dbqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
分析:bqa物理好資源網(wǎng)(原物理ok網(wǎng))
1、若吊鉤碼重力為G,除去動(dòng)滑輪和繩索的重量,則圖A中F1=G/2,圖B中F2=G/3。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2、若吊鉤碼的起升高度為h,則圖A中鋼絲繩自由端長(zhǎng)度為S1=2h。 圖B中繩子自由端的長(zhǎng)度為S2=3h。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
[想討論]bqa物理好資源網(wǎng)(原物理ok網(wǎng))
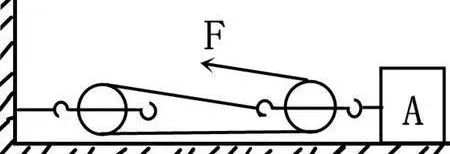
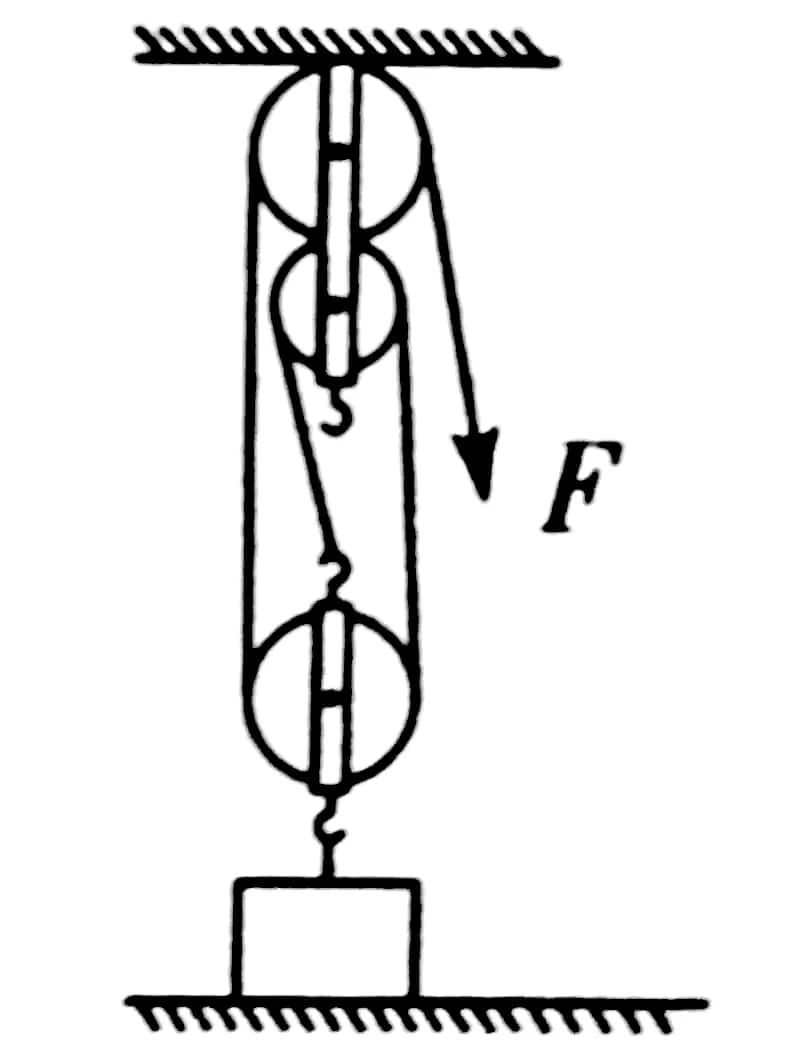
如圖所示,拉力F拉動(dòng)滑輪組,使物體A在水平地面上做勻速運(yùn)動(dòng)。 拉力F與A與地面之間的摩擦力f的關(guān)系為,繩子自由端拉下的長(zhǎng)度S與物體A移動(dòng)的距離S'有關(guān),其關(guān)系為。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
[溫馨提示]bqa物理好資源網(wǎng)(原物理ok網(wǎng))
當(dāng)物體在水平地面上以勻速拉動(dòng)時(shí),影響拉力的阻力是物體與地面之間的摩擦力,而不是滑輪與物體的重力。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
3、滑輪組的安裝bqa物理好資源網(wǎng)(原物理ok網(wǎng))
【觀察與實(shí)驗(yàn)】滑輪組的安裝bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(選擇橫向查看的音量)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
[視頻反思]bqa物理好資源網(wǎng)(原物理ok網(wǎng))
1、安裝滑輪組繞繩的方法有很多種,視頻中的繞繩方法只是其中一種。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2、實(shí)驗(yàn)過程中彈簧測(cè)功機(jī)指示出現(xiàn)誤差的原因有:bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(1)動(dòng)滑輪和繩索較重。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(2)輪與軸之間的摩擦。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(3)彈簧測(cè)功機(jī)的拉力方向不是垂直向上。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
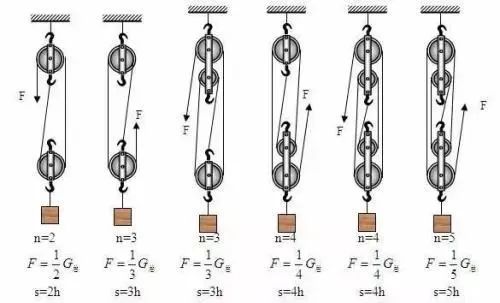
3、排除動(dòng)滑輪的重量和摩擦力,繩子自由端拉力F、鉤碼重力G、物體升起高度h、自由端運(yùn)動(dòng)長(zhǎng)度的關(guān)系繩索S和繩股數(shù)n:(如下圖)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
力關(guān)系:F=G/nbqa物理好資源網(wǎng)(原物理ok網(wǎng))
距離關(guān)系:S=nhbqa物理好資源網(wǎng)(原物理ok網(wǎng))
4、如果僅忽略繩索的自重和摩擦力,則拉力F、物體的重量G、動(dòng)滑輪GO的重量和繩股數(shù)n之間的關(guān)系應(yīng)為:F= (G+GO)/n。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如下圖:F1=(G輪+GM)/2bqa物理好資源網(wǎng)(原物理ok網(wǎng))
原理圖及受力分析圖bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
4、滑輪組的應(yīng)用bqa物理好資源網(wǎng)(原物理ok網(wǎng))
●滑輪組在物理實(shí)驗(yàn)室的應(yīng)用bqa物理好資源網(wǎng)(原物理ok網(wǎng))
實(shí)驗(yàn)室滑輪的組合方式有兩種,一種是并聯(lián)組裝(如圖A所示),另一種是串聯(lián)組裝(如圖B所示)。 無論采用哪種組合方式,滑輪的功能都是相同的。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
并行裝配bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(第一的)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
系列組裝bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(第二)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
●滑輪組在日常生活中的應(yīng)用bqa物理好資源網(wǎng)(原物理ok網(wǎng))
滑輪組是我們經(jīng)常見到的一種常用的簡(jiǎn)單機(jī)械組合。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
例如:起重機(jī)臂架前部的滑輪組、碼頭或工廠的門式起重機(jī)、機(jī)動(dòng)車或高鐵供電系統(tǒng)的滑輪組等。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
起重機(jī)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
門式起重機(jī)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
高鐵供電系統(tǒng)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
【中考真題訓(xùn)練】bqa物理好資源網(wǎng)(原物理ok網(wǎng))
(2019盤錦)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
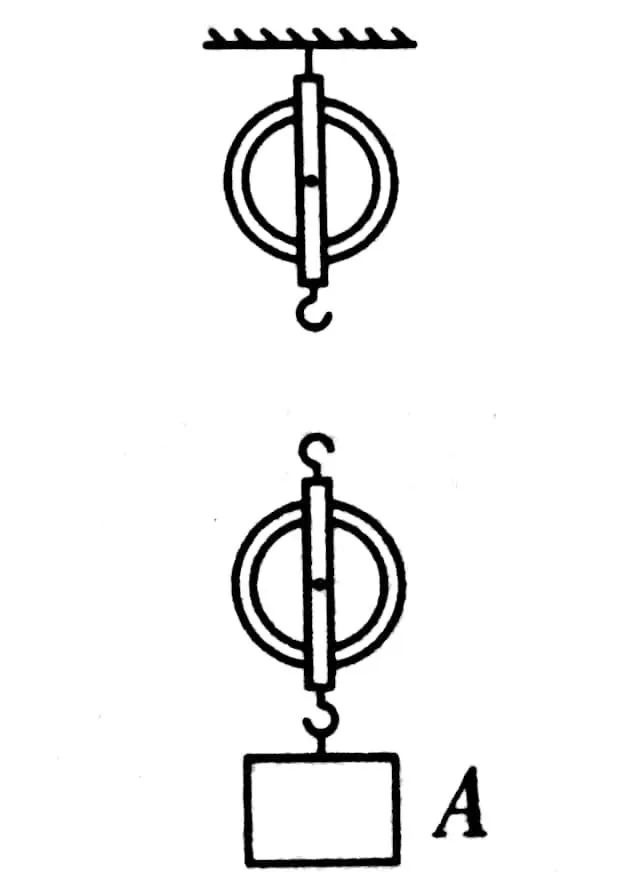
使用滑輪組提升物體A時(shí),請(qǐng)用鋼筆畫線代替繩子,畫出最省力的纏繞繩子的方法以及物體A的重力示意圖。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
2.(2019銅仁)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
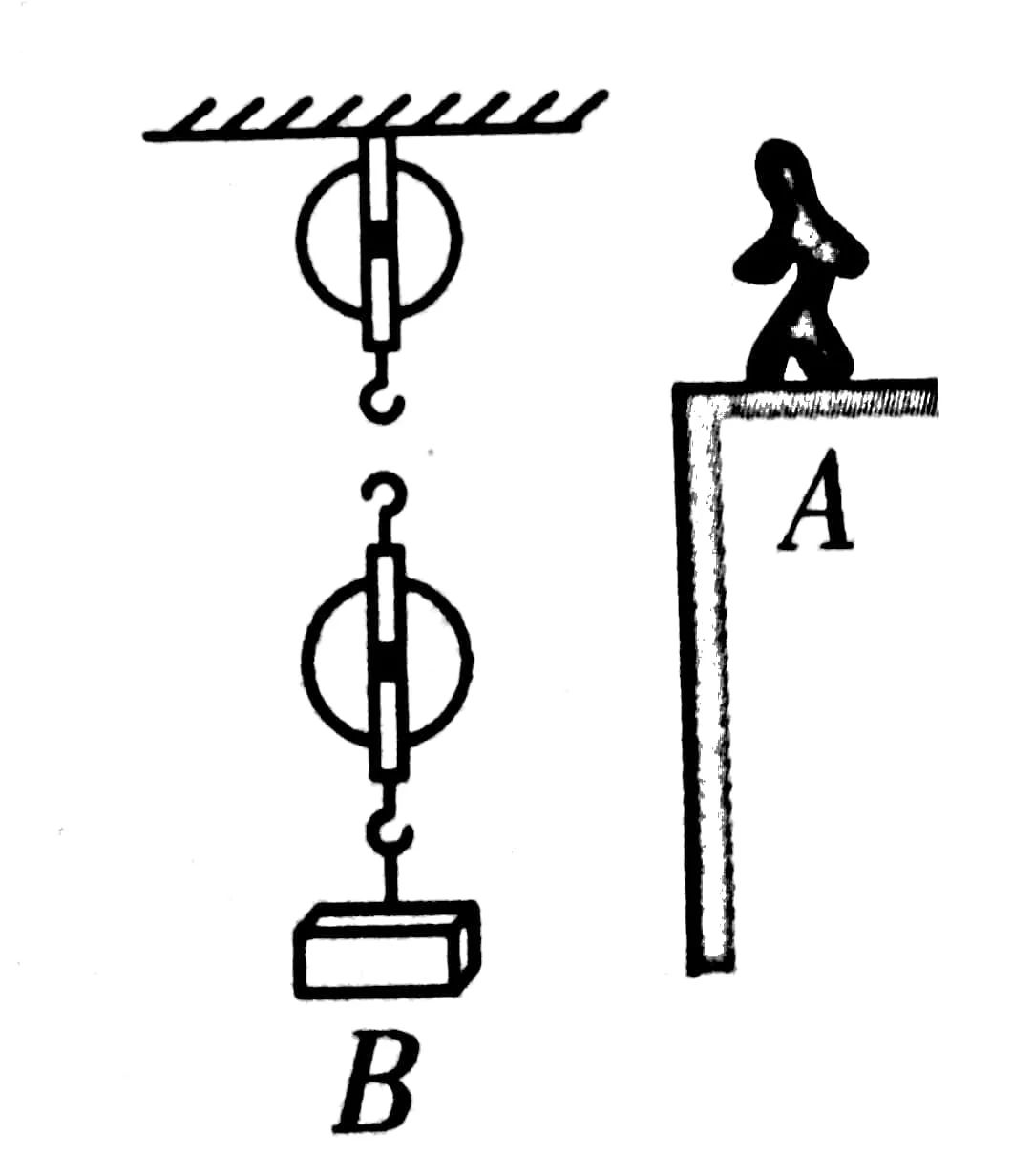
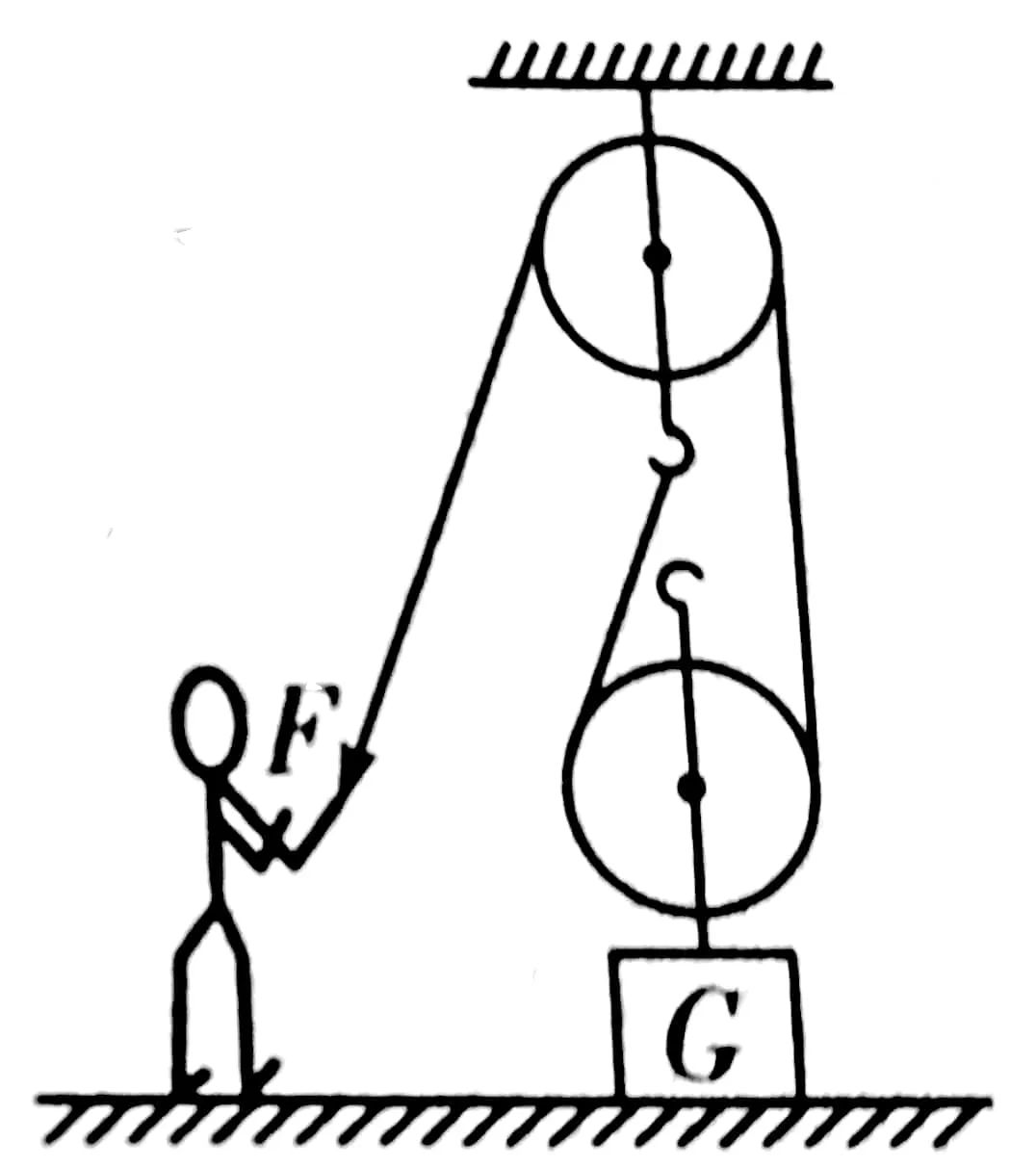
一名工人站在地面上,利用如圖所示的滑輪組將重物從地面提升到屋頂。 繩索的自由端需要向下拉。 請(qǐng)使用鋼筆線代替繩子來繪制最省力的方式來纏繞滑輪組。 。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
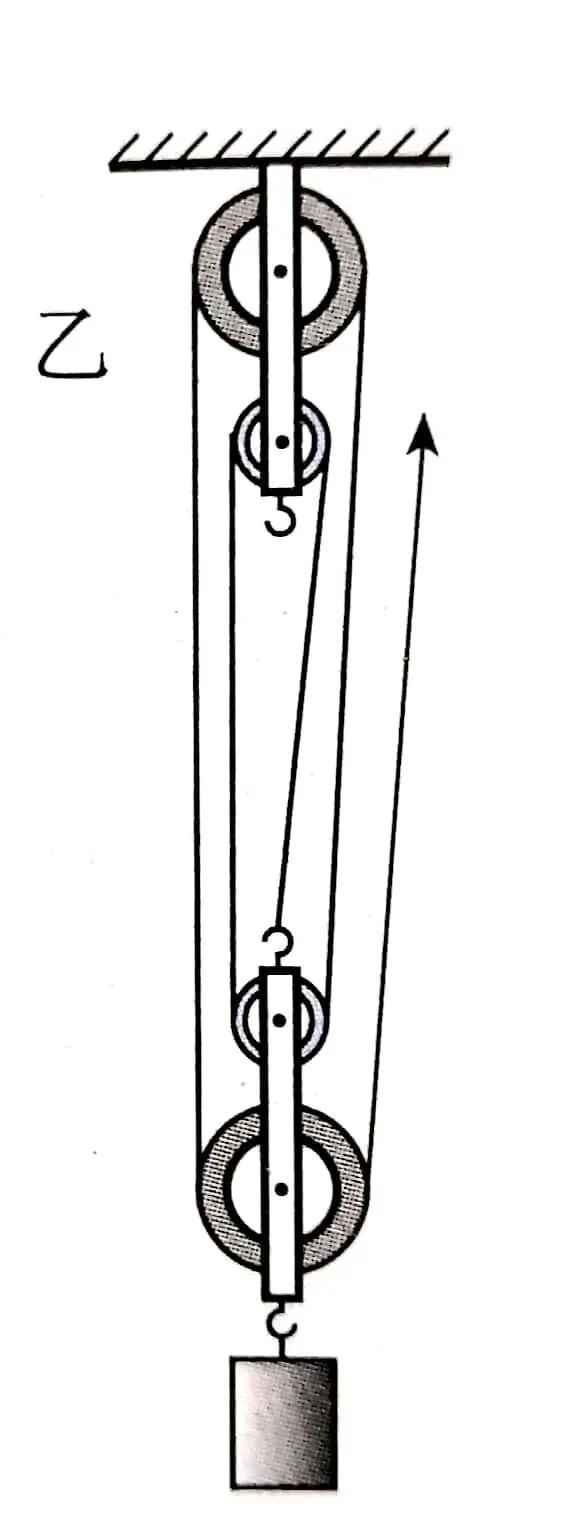
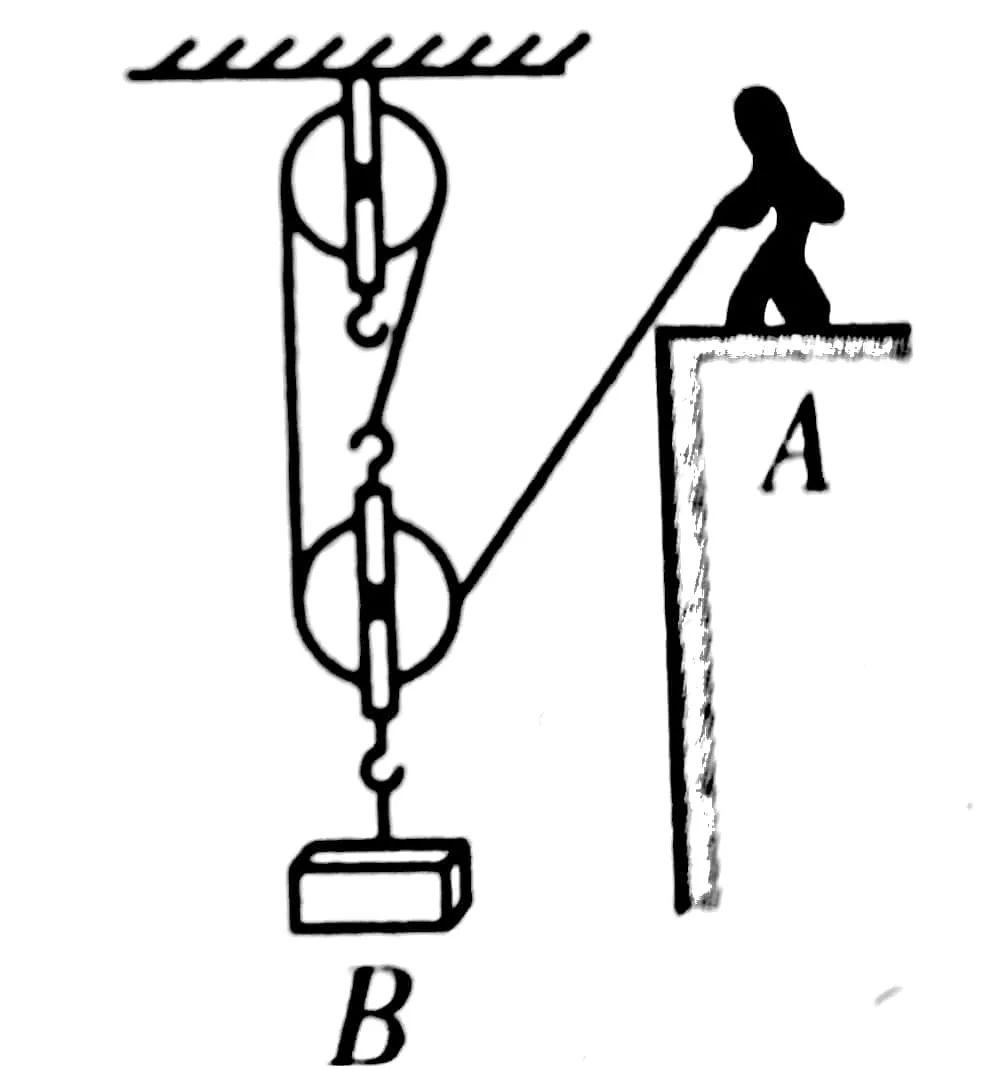
3、如圖所示,有人站在A處,通過一根繩子和兩個(gè)滑輪勻速提升物體B。 所用拉力為F=100N。 物體B重300N(不計(jì)算滑輪重量和繩索重量,也不計(jì)算摩擦力)。 取出滑輪組的繞組。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
4.(2016年賀州20題20分)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
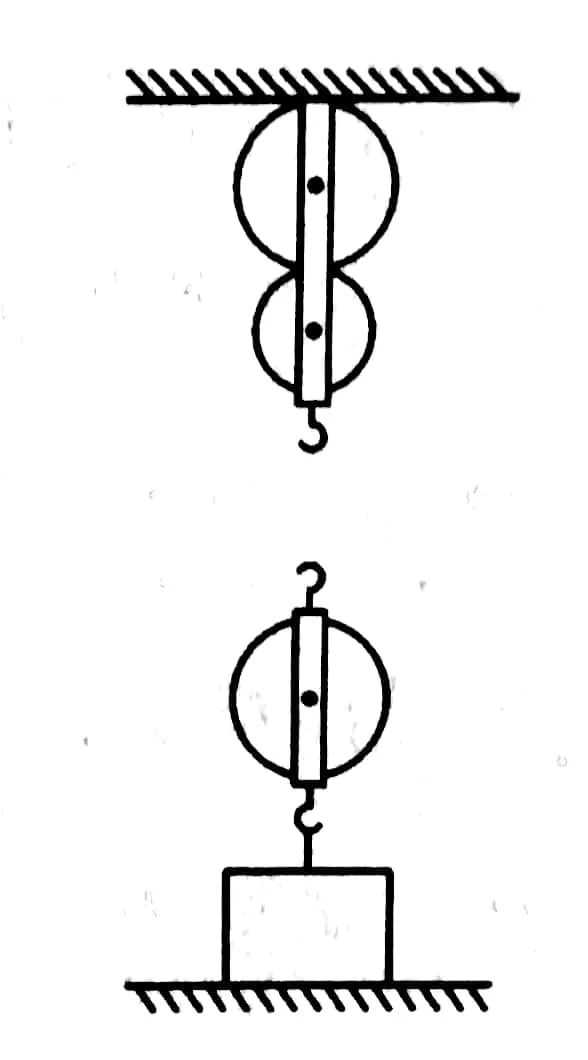
請(qǐng)用筆線代替圖中的繩子,將兩個(gè)滑輪連接起來形成滑輪組,并讓人用力向下拉動(dòng)繩子來提升重物。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
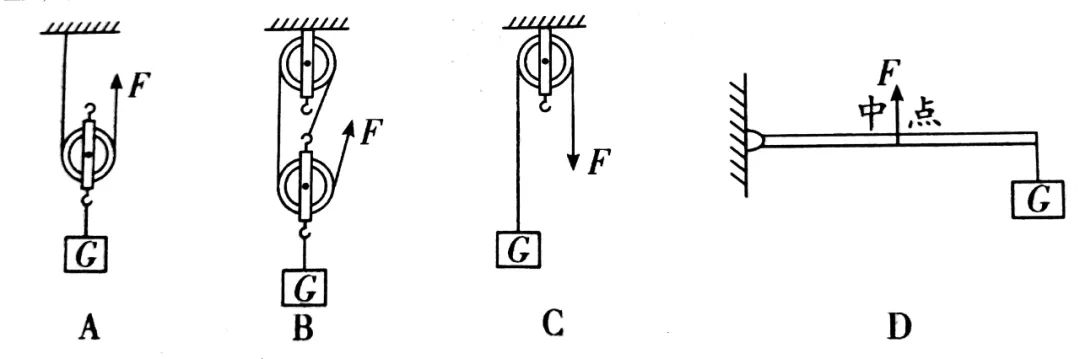
5.(2019常德)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
用如圖所示的工具吊起同一重物G(排除摩擦力,排除繩索、滑輪和杠桿的重量),最省力的是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
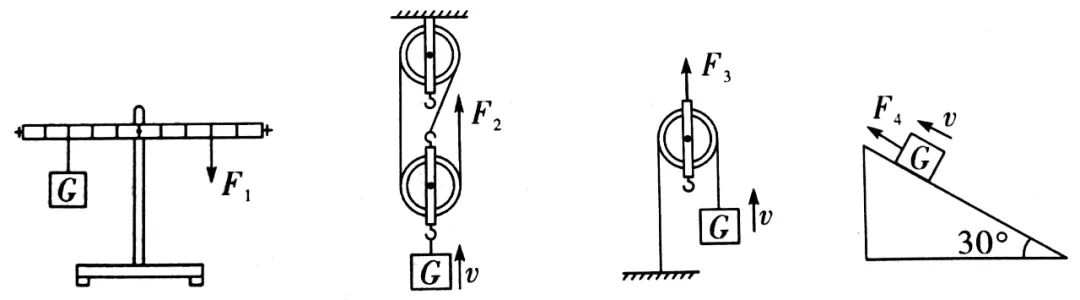
6.(2019江西)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
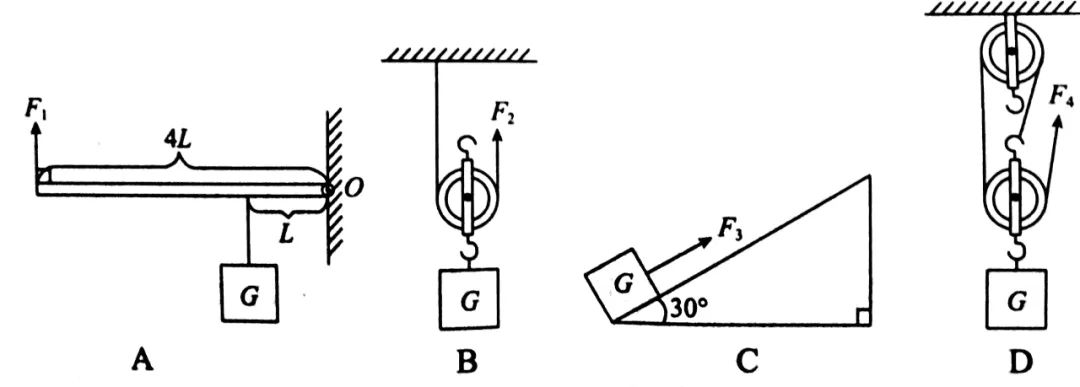
如圖所示,一個(gè)重量為G的物體在不同的簡(jiǎn)單機(jī)械中(不包括機(jī)械自重和摩擦力)處于平衡狀態(tài)。 拉力 F1、F2、F3、F4 之間的關(guān)系為 ( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A.F23=F41B.F2413bqa物理好資源網(wǎng)(原物理ok網(wǎng))
C.F4=F213D.F4231bqa物理好資源網(wǎng)(原物理ok網(wǎng))
7.(2019年東營(yíng)第9題)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如圖所示,下列簡(jiǎn)單機(jī)械中,忽略杠桿和滑輪的自重、繩索的重量和摩擦力,提升同一重物時(shí),最省力的是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
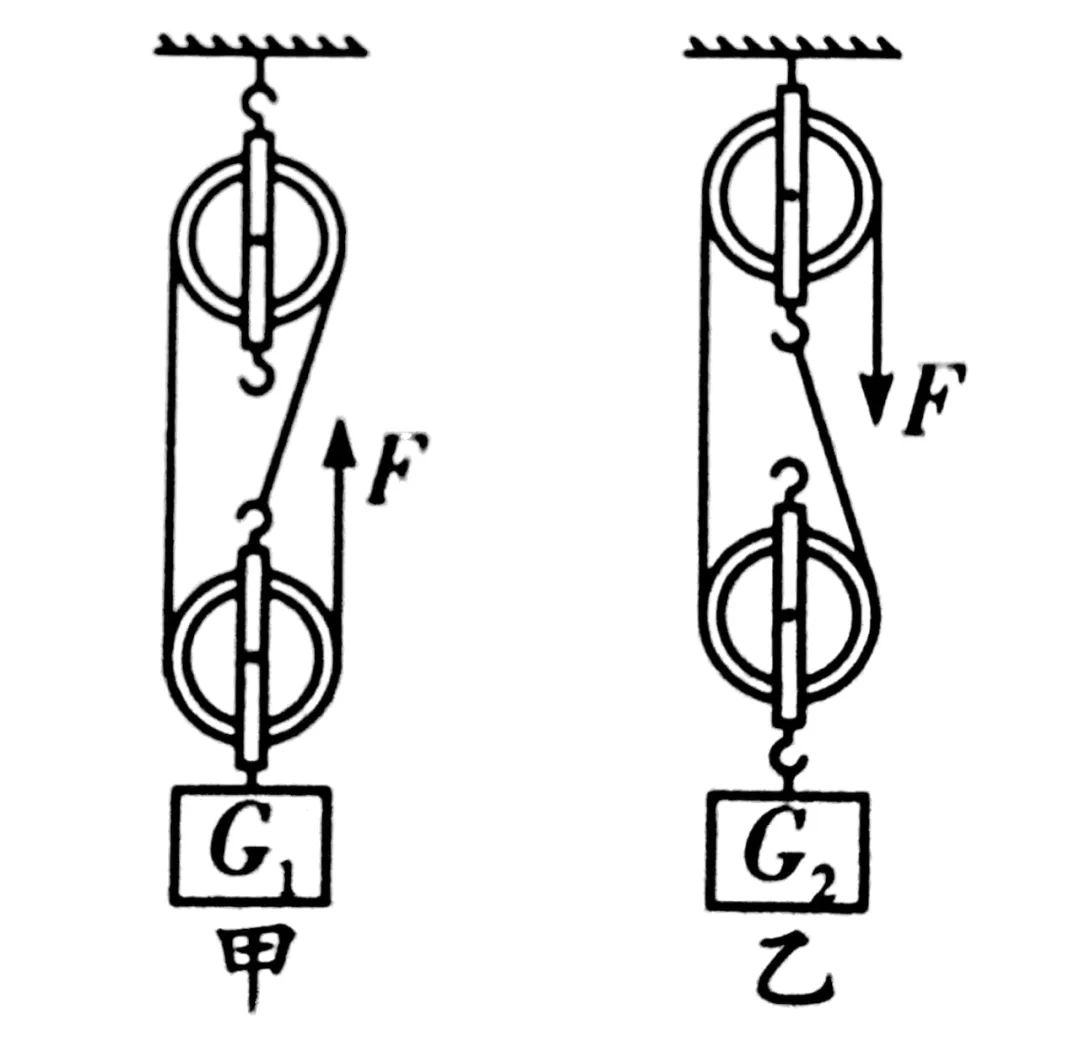
8.(2018年烏魯木齊6題3分)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如圖所示滑輪組,每個(gè)滑輪的重力相等,排除繩子的重量和摩擦力,G1=60N,G2=38N,A、B兩種情況下繩子的拉力F相等,那么每個(gè)滑輪的重力動(dòng)滑輪是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A.3 N B.6 N C.11N D.22Nbqa物理好資源網(wǎng)(原物理ok網(wǎng))
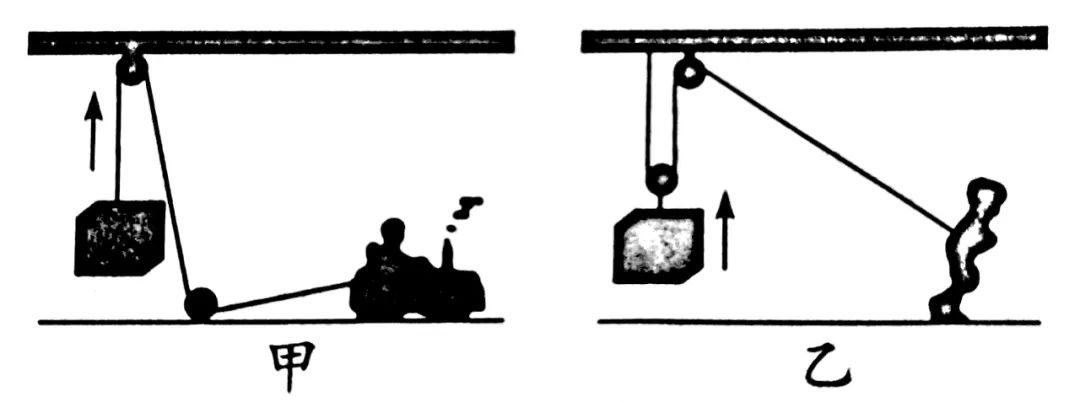
9.(2019德陽)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如圖所示,用A、B兩種滑輪將重400N的物體勻速向上提升。 已知每個(gè)滑輪重20N。 忽略繩索的重力以及滑輪與繩索之間的摩擦力,圖A中的小車是靠在繩索上的。 繩子的拉力為N,圖B中的人對(duì)繩子的拉力為N。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
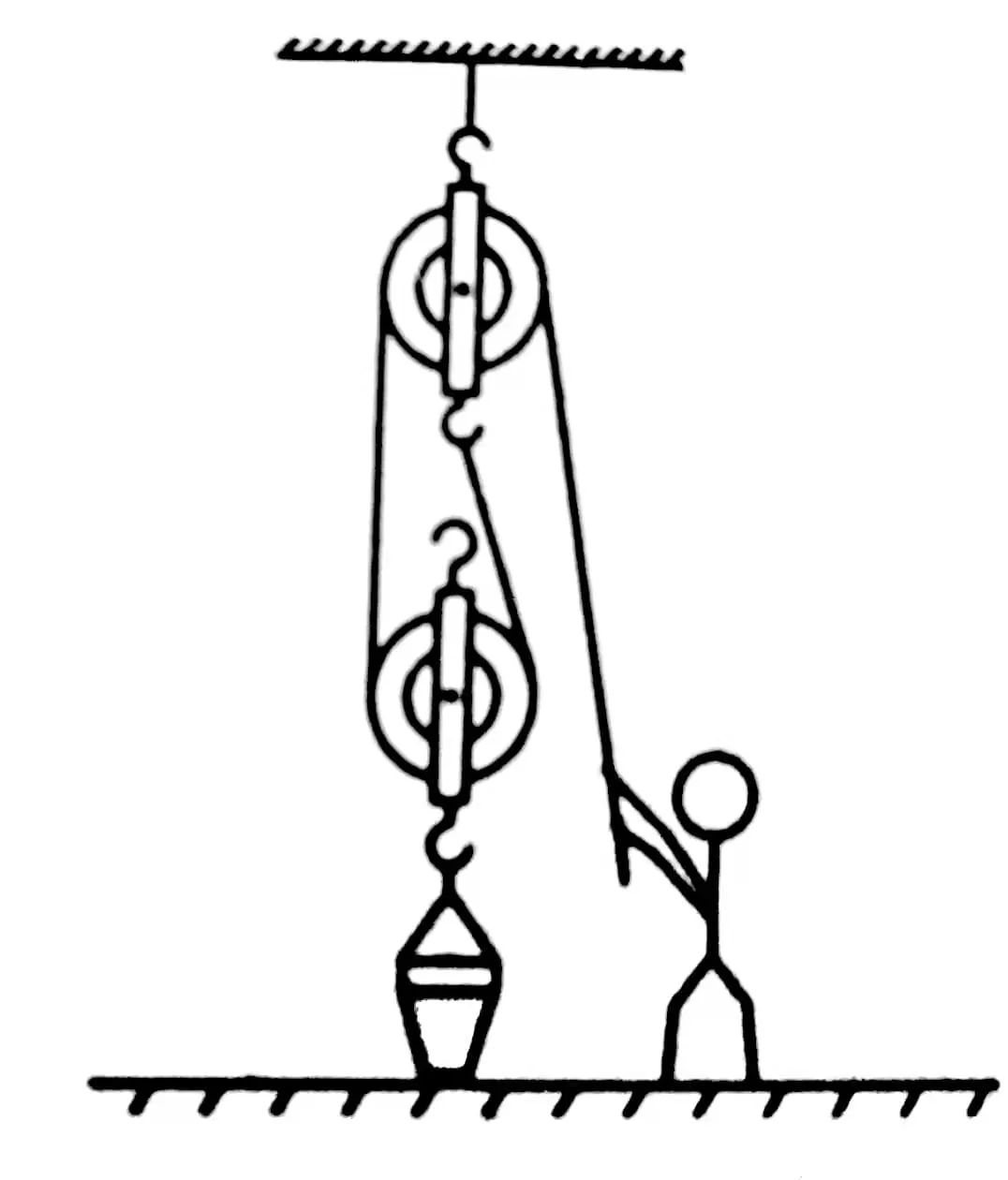
10.(2019陜西)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
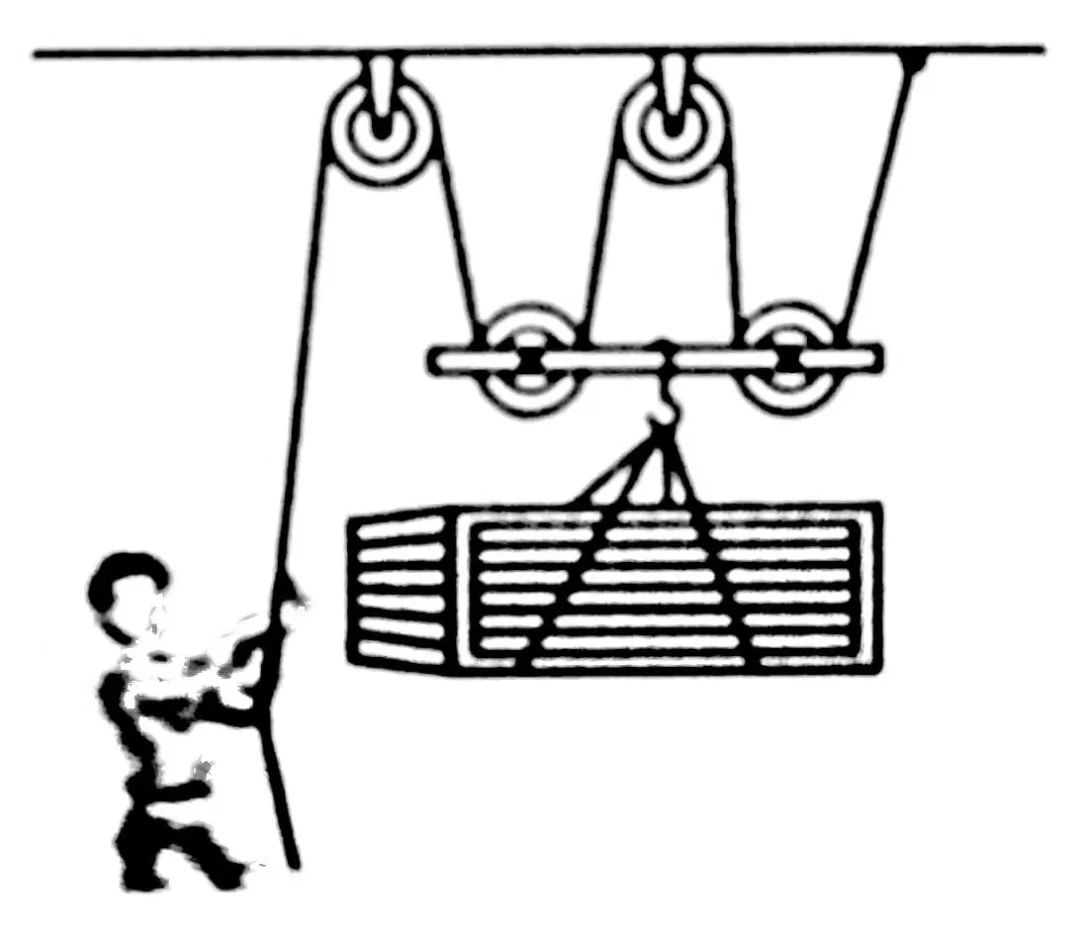
工人們使用如圖所示的設(shè)備運(yùn)輸沙石。 下列說法正確的是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A、滑輪組中的定滑輪可以改變拉力的大小bqa物理好資源網(wǎng)(原物理ok網(wǎng))
B、圖中動(dòng)滑輪相當(dāng)于省力杠桿bqa物理好資源網(wǎng)(原物理ok網(wǎng))
C、繩索自由端向下拉1m,桶上升2m。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
D、質(zhì)量為65公斤的工人使用該滑輪組可提升150公斤的沙石。bqa物理好資源網(wǎng)(原物理ok網(wǎng))
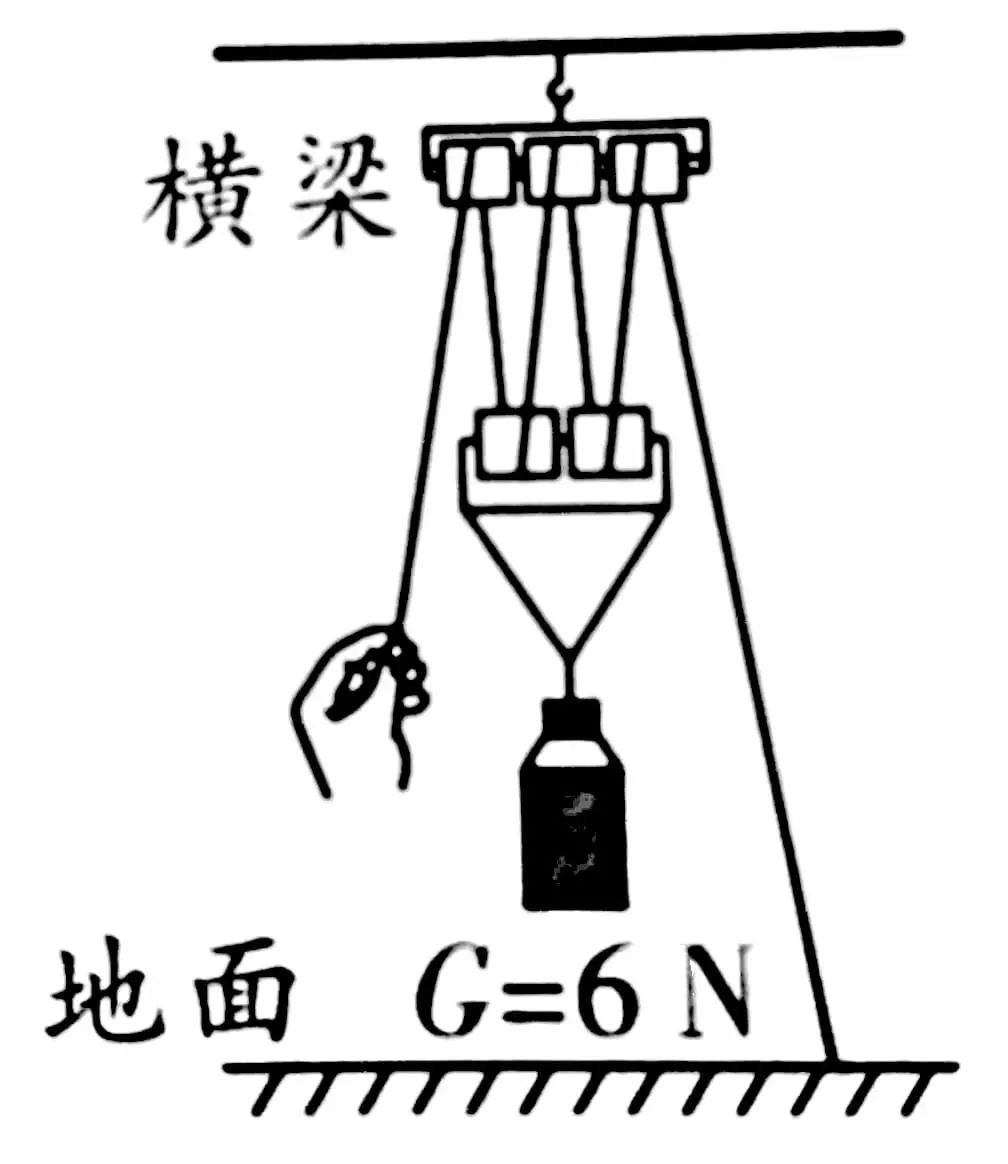
11.(2020江西)(雙選)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如圖所示,將重6N的物體勻速拉起20cm。 在此過程中,不論滑輪裝置的重量、繩索的重量和摩擦力,下列說法正確的是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A、繩子自由端向下拉1.2mbqa物理好資源網(wǎng)(原物理ok網(wǎng))
B、繩子對(duì)地面的拉力為1Nbqa物理好資源網(wǎng)(原物理ok網(wǎng))
C.物體所做的功是1.2Jbqa物理好資源網(wǎng)(原物理ok網(wǎng))
D、橫梁上的拉力為9Nbqa物理好資源網(wǎng)(原物理ok網(wǎng))
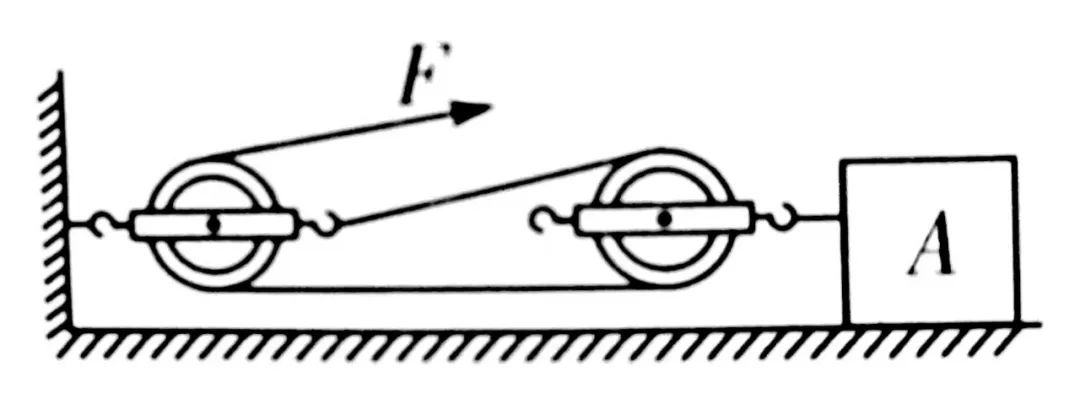
12.(2020德陽)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
如圖所示,當(dāng)水平拉力F=5N時(shí),可以使物體A沿水平地面向左勻速直線運(yùn)動(dòng)。 已知物體A的重量為10N,對(duì)地面的摩擦力為8N。 如果在10秒內(nèi),物體A水平移動(dòng)2m,無論繩子和滑輪的重量如何,在此過程中( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A、拉力F的功率為1Wbqa物理好資源網(wǎng)(原物理ok網(wǎng))
B、拉力F所做的功為10Jbqa物理好資源網(wǎng)(原物理ok網(wǎng))
C、物體A的重力所做的功為20Jbqa物理好資源網(wǎng)(原物理ok網(wǎng))
D、滑輪組機(jī)械效率80%bqa物理好資源網(wǎng)(原物理ok網(wǎng))
13.(2020年本溪、鐵嶺、遼陽)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
小鵬一家購買了一箱重960N的裝修材料。 工人們利用如圖所示的滑輪組,將裝修材料以9m的勻速提升英語作文,耗時(shí)3分鐘。 如果滑輪組的機(jī)械效率為80%(不包括箱體重量、繩索重量和摩擦力)。 小鵬計(jì)算出的下列物理量正確的是( )bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
A、繩子自由端以0.05m/s的速度移動(dòng)bqa物理好資源網(wǎng)(原物理ok網(wǎng))
B. 所做的有用功是 8640Jbqa物理好資源網(wǎng)(原物理ok網(wǎng))
C、拉力為240Nbqa物理好資源網(wǎng)(原物理ok網(wǎng))
D、牽引功率48Wbqa物理好資源網(wǎng)(原物理ok網(wǎng))
參bqa物理好資源網(wǎng)(原物理ok網(wǎng))
測(cè)試bqa物理好資源網(wǎng)(原物理ok網(wǎng))
回答bqa物理好資源網(wǎng)(原物理ok網(wǎng))
案件bqa物理好資源網(wǎng)(原物理ok網(wǎng))
存在bqa物理好資源網(wǎng)(原物理ok網(wǎng))
向下bqa物理好資源網(wǎng)(原物理ok網(wǎng))
邊bqa物理好資源網(wǎng)(原物理ok網(wǎng))
嘗試去找bqa物理好資源網(wǎng)(原物理ok網(wǎng))
哦bqa物理好資源網(wǎng)(原物理ok網(wǎng))
!bqa物理好資源網(wǎng)(原物理ok網(wǎng))
參考答案:bqa物理好資源網(wǎng)(原物理ok網(wǎng))
1問題圖片2問題圖片bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
3題圖片 4題圖片bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
 bqa物理好資源網(wǎng)(原物理ok網(wǎng))
bqa物理好資源網(wǎng)(原物理ok網(wǎng))
5.B 6.B 7.B 8.Bbqa物理好資源網(wǎng)(原物理ok網(wǎng))
9.400 210bqa物理好資源網(wǎng)(原物理ok網(wǎng))
10.B11.CD12.D13.Bbqa物理好資源網(wǎng)(原物理ok網(wǎng))
溫馨提示bqa物理好資源網(wǎng)(原物理ok網(wǎng))
發(fā)表評(píng)論