本文我們將簡單了解陀螺儀的構(gòu)造、用途、原理、以及三大特性,最后用圖來說明陀螺儀姿態(tài)的三個角度數(shù)據(jù)。
陀螺儀有什么用途?
陀螺儀經(jīng)常出現(xiàn)在慣性決策單元(IMU)中。在上一篇文章(點擊跳轉(zhuǎn))中我們提到了慣性導(dǎo)航系統(tǒng)INS,其中組成慣性導(dǎo)航系統(tǒng)的設(shè)備單元IMU就是由陀螺儀組成。它可以實現(xiàn)不依賴外界信息輸入。慣性導(dǎo)航系統(tǒng)可以給自動駕駛汽車提供航向、姿態(tài)、速度、位置等導(dǎo)航參數(shù),是高精度定位不可或缺的一部分。
陀螺儀不僅應(yīng)用于自動駕駛定位,還廣泛用于航海、航天、軍事等各個領(lǐng)域,可以很好地測量旋轉(zhuǎn)、偏轉(zhuǎn)等運動,并可以感知飛行器姿態(tài)的變化旋轉(zhuǎn)物體的角動量是恒定的,并將這些信息反饋給控制系統(tǒng),從而實現(xiàn)飛行器的姿態(tài)控制和穩(wěn)定飛行。
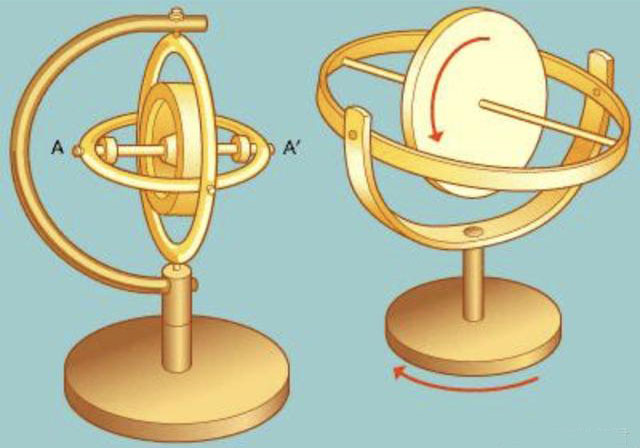
旋轉(zhuǎn)陀螺儀
陀螺儀可以感知一個或多個軸的角速度英語作文,能夠精確感知自由空間中的復(fù)雜運動,因此陀螺儀已成為追蹤物體運動和旋轉(zhuǎn)的必備運動傳感器。與加速度計和電子羅盤不同,陀螺儀不需要重力、磁場等外力,可以自主工作,因此理論上僅使用陀螺儀就可以完成姿態(tài)導(dǎo)航任務(wù)。

陀螺儀
簡單來說,陀螺儀是依據(jù)角動量守恒定律設(shè)計的,陀螺儀主要由位于軸心的可旋轉(zhuǎn)轉(zhuǎn)子組成,一旦陀螺儀開始旋轉(zhuǎn),由于轉(zhuǎn)子的角動量,陀螺儀會傾向于抵抗方向的改變。
那么陀螺儀為什么會有這樣的用途呢?說陀螺儀的原理,首先就要說陀螺儀的特點。
陀螺儀的特點有哪些?
1. 固定軸
陀螺儀在轉(zhuǎn)動過程中不會傾倒,得益于它的第一個特性,即定軸性,即當(dāng)陀螺儀軸不受外界力矩影響時,它的方向始終指向初始的恒定位置。
陀螺儀在旋轉(zhuǎn)時,若作用于它的外力的力矩為零,則角動量定理表明,陀螺儀相對于支點的角動量守恒,運動過程中角動量的方向不變。陀螺儀上的每一點都在垂直于旋轉(zhuǎn)軸的平面內(nèi)沿圓周旋轉(zhuǎn)。根據(jù)慣性定律,每個點總是試圖沿圓周的一條切線離開圓周,但所有切線都與圓周本身處于同一平面內(nèi)。因此,每個點在移動時,都盡力停留在垂直于旋轉(zhuǎn)軸的平面上。
陀螺儀軸穩(wěn)定性
2. 漸進(jìn)式
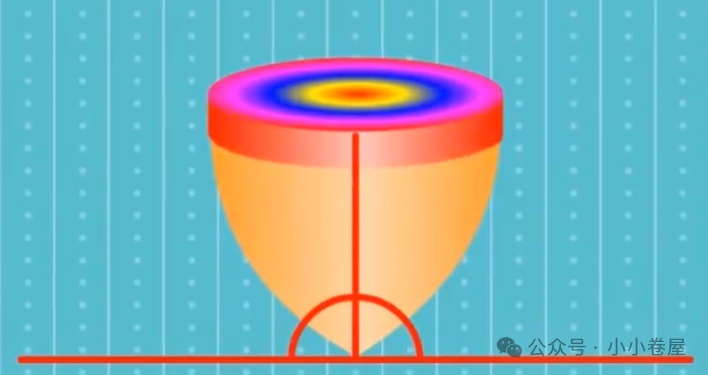
陀螺儀的第二個特性是進(jìn)動。當(dāng)陀螺儀高速旋轉(zhuǎn)時,陀螺儀的中心軸好像在繞著一根直立的桿子旋轉(zhuǎn)。這種高速旋轉(zhuǎn)物體的軸在空間旋轉(zhuǎn)的現(xiàn)象就叫進(jìn)動。這是因為當(dāng)陀螺儀受到重力作用于支點的力矩時,根據(jù)角動量定理,角動量的矢量方向會跟隨陀螺儀的旋轉(zhuǎn),描繪出一個圓錐體,如下圖所示。

陀螺儀的進(jìn)動
其實,我們在日常生活中經(jīng)常可以看到進(jìn)動現(xiàn)象,比如自行車在行駛過程中,如果稍微傾斜了,只要將車頭稍微轉(zhuǎn)向另一側(cè),自行車就能保持平衡,這是因為重力在輪胎支點上形成了一個進(jìn)動力矩,使得自行車重新恢復(fù)平衡。
3. 章動
陀螺儀的第三個特性是章動。陀螺儀不可能一直旋轉(zhuǎn)下去,當(dāng)陀螺儀因摩擦而開始慢慢下落時,它所做的運動就是章動。章動是指剛體進(jìn)動時,繞旋轉(zhuǎn)軸的角動量傾斜角的變化。拉丁語中是點頭的意思。陀螺儀進(jìn)動時,陀螺儀的陀螺頭也在點頭。


章動與進(jìn)動之間的關(guān)系
同樣,章動也是天體中很常見的運動,地球也會章動,地球“點頭”一次需要18.6年,中國古代歷法以19年為一章,所以這種運動就叫章動。
對于定軸旋轉(zhuǎn),垂直于轉(zhuǎn)軸方向的合成外力矩恒為零旋轉(zhuǎn)物體的角動量是恒定的,剛體的轉(zhuǎn)軸始終固定;對于定點旋轉(zhuǎn),剛體的進(jìn)動與垂直于轉(zhuǎn)軸方向的合成外力矩有關(guān)。當(dāng)定點旋轉(zhuǎn)剛體在垂直于進(jìn)動方向有微小的偏差時,剛體在進(jìn)動的同時就會伴隨類似簡諧振動的章動。[1]易厚暉,姚艷麗.從陀螺儀進(jìn)動與章動分析談大學(xué)物理中剛體部分的教學(xué)[J].師范大學(xué)理科學(xué)報,2016,36(10):43-45+54.
IMU 中的陀螺儀角度數(shù)據(jù)
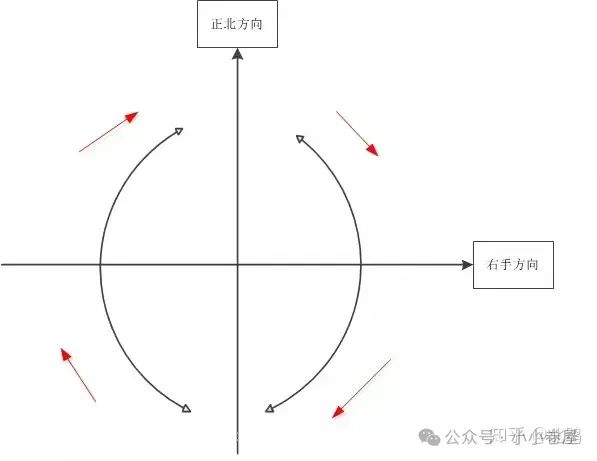
IMU數(shù)據(jù)主要包括航向角(Phi)、俯仰角(Omega)、滾轉(zhuǎn)角(Kappa)三個數(shù)據(jù)。
1. 航向角(Phi):飛機(jī)或航天飛機(jī)的縱軸與地球北極之間的角度。
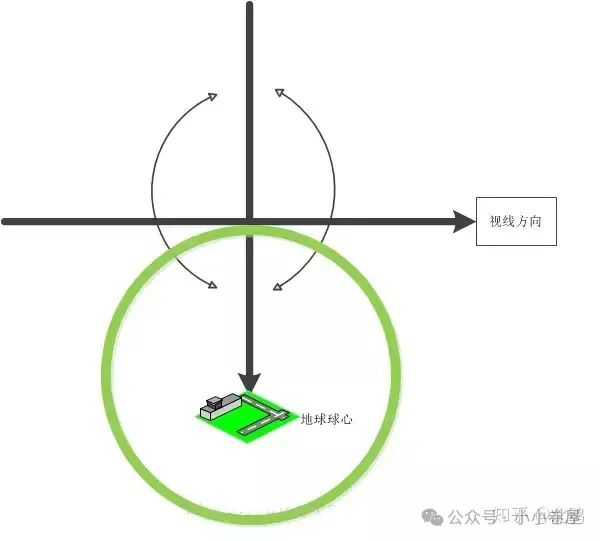
2、俯仰角(Omega):平行于機(jī)身軸線并指向飛機(jī)前方的矢量與地面之間的夾角。
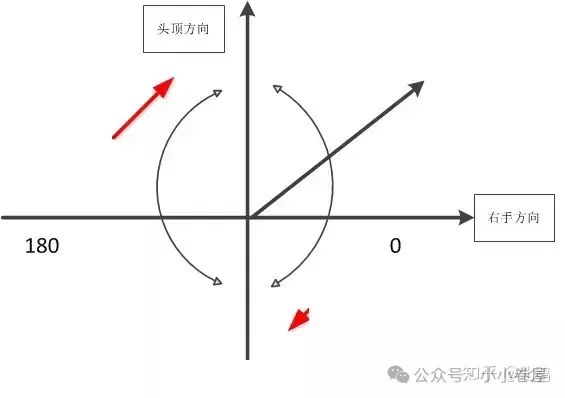
3、橫滾角(Kappa):橫滾角又稱側(cè)滾角,是光軸與十圓之間的夾角。
往期亮點:
如果你覺得有用,請