·快樂時光·
阿基米德說:“給我一個支點,我可以移動整個月球。”
給你一個支點,你是怎么做到的? 期待你的表現!
1.思維導圖
2.傳知識點
知識點一:杠桿
一、杠桿的定義
在力的作用下能繞固定點轉動的剛性桿稱為杠桿。 (像蹺蹺板一樣)
【注意】杠桿可以是直的也可以是彎的,可以有各種形狀,必須是硬桿。
2. 杠桿五要素
①支點:杠桿轉動所繞的固定點,用O表示。
②力:使杠桿轉動的力,用F1表示。
③阻力:阻礙杠桿轉動的力,用F2表示。
④動力臂:支點到動力作用線的距離,用l1表示。
⑤阻力臂:支點到阻力作用線的距離,用l2表示。 (力的作用線:通過力的作用點沿力的方向畫的直線)
【注意】支點一定在杠桿上,但力臂不一定在杠桿上; 力和阻力的作用點在杠桿上; 力臂是從支點到力的作用線的距離,而不是到作用點的距離。 (仔細區分作用線和作用點)
01
關于杠桿,下列說法正確的是( )
A.杠桿必須是直的
B.使用杠桿時省力,節省距離
C、動力臂必須等于支點到動力點的距離
D、動力臂不僅與發力點的位置有關,還與發力的方向有關
點擊空白處查看答案
【答案】選D
分析: A. 杠桿是可以轉動固定點的硬桿,不一定是直的。 如鑷子、扳手等,所以A錯;
B、杠桿分為省力型、勞動密集型、等臂型三種。 省力杠桿花費距離,勞動密集型杠桿節省距離,等臂杠桿既不省力也不省距離,所以B錯;
C、動力臂是支點到動力作用線的距離,不是動力作用點,所以C錯;
D、動力臂是支點到動力作用線的距離,它與動力作用點的位置和動力的方向有關,所以D是正確的。
因此選擇:D。
3.力臂的繪制方法
某點(支點),兩條線(力的作用線),點(支點)到線(力的作用線)畫的三條線,支點到豎腳的距離就是力臂,以及相應的符號(l1 或 l2)。 如右圖所示:
某一點
兩條線圖
三豎線
02
如圖A,用剪線鉗剪線時,剪線鉗可以看作是兩個杠桿的組合,其中一個如圖B所示。請在圖B中:
(1) 畫出功率F1的力臂;
(2)從A、B兩點中選擇一個比較省力的位置,畫出該點電阻F2的示意圖。
點擊空白處查看答案
【回答】
(1)從支點到動力作用線做一條豎線,豎線的寬度為動力臂L1;
(2)如果想用較小的力,阻力不變,動力臂不變。 根據杠桿的平衡情況,阻力臂必須減小,因此鐵絲必須靠近軸A。
由圖可知,人手握把上的排斥力F1使鑷子順時針旋轉,故阻力F2垂直于鉗口向下方向。
4.杠桿的均衡條件
含義:在力的作用下,如果杠桿處于靜止狀態或平穩且勻速轉動,我們就說杠桿是平衡的。
杠桿平衡條件:功率X動力臂=阻力X阻力臂(F1l1=F2l2)
03
在探索“杠桿的平衡條件”的實驗中,小華利用杠桿、細線、掛鉤等設備探索:
(1)調整拉桿平衡時,根據生活經驗,要使拉桿保持在平衡位置。 從實驗的角度來看,杠桿在這個位置是平衡的滑輪機械效率思維導圖,以便于閱讀。
(2)如圖所示,在拉桿兩側的A點掛上兩個掛鉤。 為了保持拉桿平衡,在拉桿兩邊掛鉤時,是先確定細線位置再上鉤,還是先上鉤再確定細線位置? . 原因是。
(3)操作完成后,將杠桿重新平衡到如圖所示位置。 小花多次在左右兩邊加等量的鉤子,細線位置不變,發現每次都能平衡拉桿。 通過記錄以上實驗數據,得出杠桿平衡的條件是:“只有當支點左右兩邊的力臂和力相等時,杠桿才能平衡”。
能否請您分析一下從這個過程中得出的推論是否可信? (可選:“是”或“否”),原因是。
點擊空白處查看答案
【答案】(1)橫向; 力臂的大小; (2)先勾碼,再確定細線位置; 力臂可以連續變化,杠桿可以很容易地調整到水平位置的平衡; (3) 否; 沒有力臂相等或不相等排斥的情況被多次探索。
分析:(1)調整拉桿平衡時,根據生活經驗,需要將拉桿保持在水平位置平衡; 水平位置平衡杠桿的目的是力臂在杠桿上,①力臂的大小易于讀取; 實驗的影響;
(2)在探索“杠桿的平衡條件”的實驗中,需要改變力的大小。 首先,鉤子固定在細線的位置,這樣力臂可以連續變化,也可以很容易地調整杠桿使其在水平位置保持平衡;
(3) 在實驗中,為了得到一個普遍的規律,應該進行多次測試。 實驗中需要改變力的大小,根據力臂的變化判斷杠桿的平衡情況; 在小華的實驗中,力臂和力臂沒有區別。 多次探討不等排斥的情況。
五、杠桿的分類
等臂杠桿:力臂等于阻力臂的杠桿為等臂杠桿。 即:l1=l2F1=F2。 (例如:托盤平衡)
省力杠桿:動力臂小于阻力臂的杠桿為省力杠桿。 即:l1>l2F1<F2。 (如:花生夾)特點:省力但成本遠
硬杠桿:力臂大于阻力臂的杠桿為硬杠桿。 即:l1<l2F1>F2。 (如:鉗子)特點:費力但節省距離
04
在圖中所示的器具中,使用費力的杠桿是()
A、軟木起子
B. 剪錫刀
C.撬棍
D. 槳
點擊空白處查看答案
【答案】選D
分析:A.軟木起子在使用過程中,動力臂比阻力臂小,屬于省力杠桿,所以A不符合題意;
B. 鐵剪刀在使用過程中,動力臂比阻力臂小,屬于省力杠桿,故B不符合題意;
C。 撬棍在使用過程中,動力臂比阻力臂小,屬于省力杠桿,故C不符合題意;
D. 劃水過程中,動力臂大于阻力臂,是費力的杠桿,所以D符合題意。
知識點2:滑輪
1.定滑輪和動滑輪
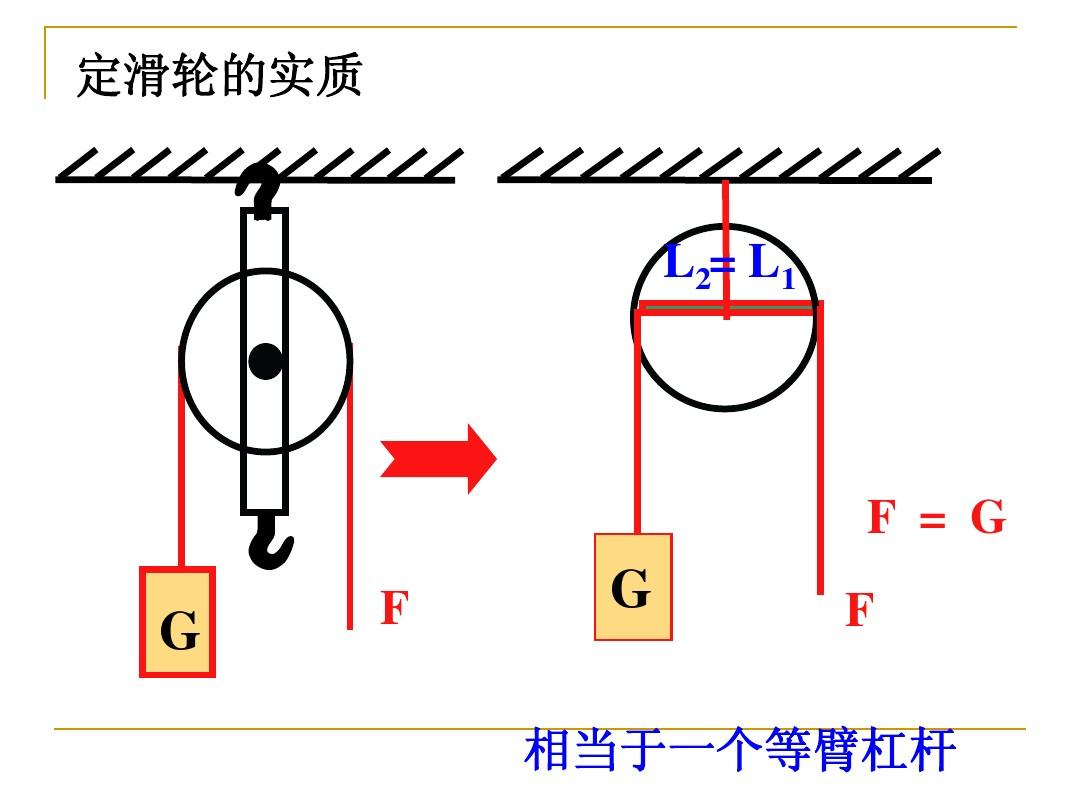
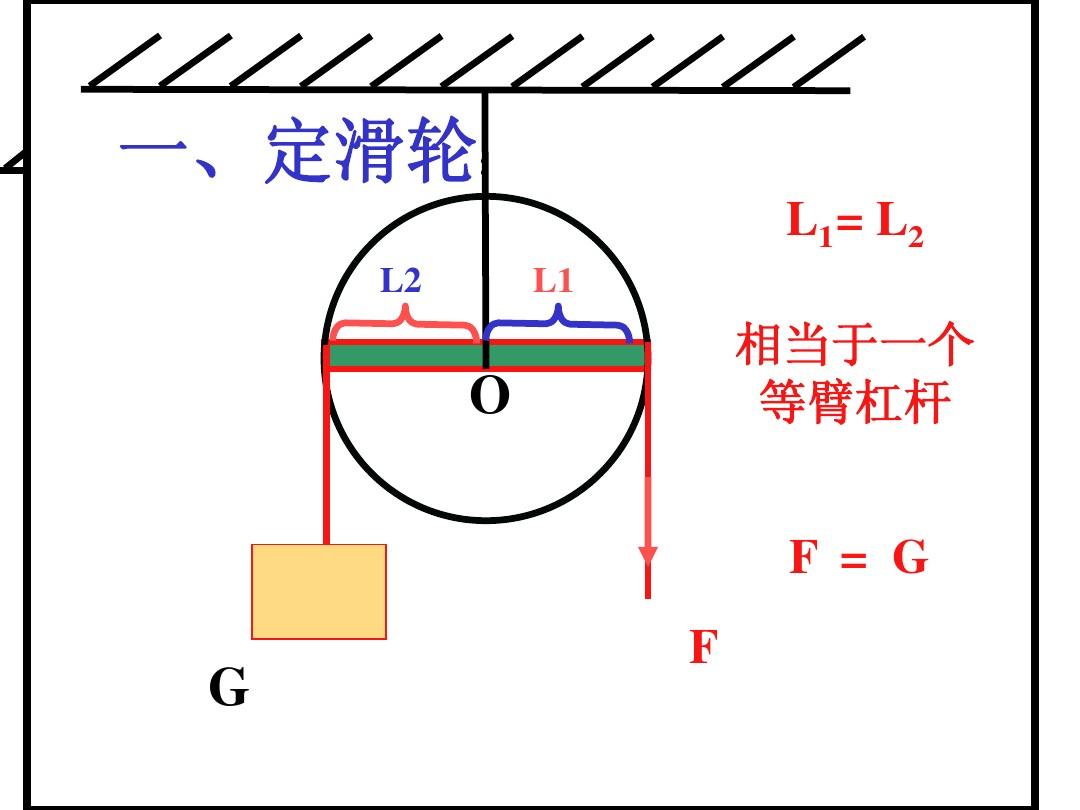
定滑輪:工作時,軸不隨物體移動。 (基本等于臂桿)
特點: ①改變力的方向,不省力。 如果不考慮繩索的重量和摩擦力,當用定滑輪提升重量為G的物體時,拉力F=G。 ②不管距離遠近,如果物體之間的距離為h,則繩索自由端之間的距離為s=h。
動滑輪:工作時,軸與物體相通。 (大量省力桿)
特點:①省力,但力的方向不能改變。 如果不考慮動滑輪的重量、繩索的重量和摩擦力,當重為G的物體被動滑輪吊起時,拉力F=G/2。 ②距離的代價,如果物體之間的距離為h,則繩索自由端之間的距離為s=2h。
05
用簡單的機械舉起同樣的重量(忽略滑輪重量、繩索重量和摩擦力),圖中所示裝置中最省力的是()
A
乙
C
D.
點擊空白處查看答案
【答案】選D
分析:由題可知,忽略滑輪重量、繩索重量和摩擦力,設增加物體的重力為G。
A、圖中直接舉起重物,拉力為F1=G;
B、圖中重物通過滑輪架提升,n=2,拉力F2=G/2;
C、圖中重物通過定滑輪提升,拉力為F3=G;
D、圖中重物通過滑輪架提升,n=3,拉力F4=G/3;
可見,方案D的裝置最省力。
5.滑輪架
定義:定滑輪和動滑輪組合成滑輪架。
特點:省力,改變力的方向
滑輪架力F、移動距離s和速度v:
垂直滑輪:
情況一:不考慮動滑輪重量、繩索重量和摩擦力:F=G物/n滑輪機械效率思維導圖,s=nh,v繩=nv物。
情況 2:不考慮繩索重量和摩擦力:
F=(G thing+G move)/n, s=nh, v rope=nv thing。
水平滑輪:
不考慮滑輪與繩索的摩擦力:F=f/n(f為物體的滑動摩擦力),s=ns物體,v繩=nv物體。
【注】n為動滑輪上繩索的股數,n的判斷方法:只看動滑輪,即直接與動滑輪相連的繩索股數為該值的 n。
小車架繞線形式:
從鉤子開始,上下交替,由內向外(繩子受力時處于縮短狀態,所以畫纏繞形式時一定要用刻度尺)
06
如果在水平地面上放置一個物體,一個人站在地面上,借助滑輪架以300N的力將重物以勻速提上樓,請畫出繩子的纏繞方法圖中的滑輪架。
點擊空白處查看答案
【回答】
圖中滑輪架由兩個定滑輪和一個動滑輪組成。 要使滑輪架向上運動,迫使物體向下運動,應從動滑輪開始繞線,如圖:
知識點三:機械效率
1.有用的工作(Wyou):對人有用的工作(有用的工作是為了達到某種目的而必須做的工作;在做工作時,有用的工作越大越好)
2. 額外工作(W量):人們不需要而不得不做的工作。
3、總功(W total):有用功和額外功之和(W總=W有+W量)
4、機械效率:有用功與總功之比稱為機械效率。 (機械效率必須大于1)
【注】①機械效率的高低只能表示有用功在總功中所占的比例,與是否節省勞力或完成多少功無關; ② 功率大并不一定意味著機械效率高; 高機械效率并不一定意味著高功率。 請不要混淆!
07
(多選)火神山施工現場,師傅用同一個定滑輪和動滑輪組成兩個滑輪架A和B,如圖,分別用來吊起同一個重物,并擋住A 舉起重物 高度為 1m,第二塊舉起重物 2m。 在忽略繩索自重和摩擦力的情況下,下列說法正確的是?
A、第一滑輪架拉力大,多做功少
B、第二臺車架省力,機械效率高
C、B小車舉重物高,機械效率高
D.滑輪 B 做了更多有用的功,但 A 和 B 的機械效率相等
點擊空白處查看答案
【答】選擇AD
08
在“探究影響滑輪架機械效率的激勵因素”的實驗中,康偉佳對滑輪架進行了3組實驗,實驗數據記錄如下
(1)請根據實驗數據,完成圖中小車架的繞線。
(2) 實驗時應帶動繩索自由端的彈簧測力計垂直向下。
(3)進行第三組數據檢測時,小車架機械效率為 。
(4) 從表中數據分析可知,同樣的滑輪架,物體重量越大,滑輪架的機械效率越高。
(5)進行第二組數據檢測時,物體上升速度為0.1m/s,則拉力F的功率為W,滑輪架所做的額外功為J。
點擊空白處查看答案
【答案】(1)如圖; (2)勻速; (3) 90.9%; (4) 更大; (5) 0.360.06
09
如圖所示,將一個質量為6kg的物體沿斜面以勻速從A點拉到B點。 拉力40N,下落高度0.5m,AB寬1m。 計算:(g=10N/kg)
(1) 拉力所做的有用功:
(2)邊坡機械效率;
(3)物體上的摩擦力。
(4) 請提出提高該斜坡效率的方法:。
點擊空白處查看答案