1、動平衡問題的判斷
1、共點力的判斷
同時作用在同一物體上的各種力的作用線相交于一點,這就是公共點力。
2、動平衡判斷
對于處于平衡狀態(tài)的物體,當某一力發(fā)生變化時,其他力也急劇變化,但物體仍處于平衡狀態(tài)。 典型關鍵詞——“慢速旋轉”、“慢速連接”……
?注意,聯(lián)通不一定處于平衡狀態(tài)。
?平滑連接的動能幾乎為零,可以忽略不計,并且重力勢能可能會發(fā)生變化。
2、動平衡問題力的處理
圖解法:畫出受力分析圖,線段的長度代表受力的大小。
解析法:列舉力的函數表達式并求解。
3、統(tǒng)一聯(lián)通、溫柔聯(lián)通
如果物體沿直線運動,則處于平衡狀態(tài); 如果它沿曲線移動,則它不處于平衡狀態(tài)。 由于仍然存在向心力,但切向力為零,因此物體處于不平衡狀態(tài),速度恒定且速度很高。 小,可以感覺到向心力趨近于零,可以看作是一種平衡狀態(tài)。
4. 分類分析
第1種:平行四邊形合成法
示例:如圖所示,
重物的質量為m,燈串AO、BO的A、B端固定。 平衡時,AO為水平方向,BO與水平方向的傾斜角為θ。 AO的拉力F?和BO的拉力F2為 作用點B沿水平方向向右平滑連接。 在該點位置不動的情況下,正在進行B點的連接過程(AD)
A.F?仍然變小
B.F?先變小,后變大
C.F2 還在不斷變大
D.F2 仍在變小
類型2:動態(tài)三角法
1.半變力
一種力的大小和方向是確定的(恒力),一種力的大小和方向是確定且不確定的(半變力),另一種力的大小和方向都是不確定的(未定力)。
例:圖為用于涂刷墻面油墨的“油漆滾筒”示意圖。
使用時,用桿子推動粘有油漆的墨水,在墻壁上緩慢地上下滾動,使墨水均勻地涂在墻上。 桿子的重量和對墻壁的摩擦力不算在內,但桿子足夠長,可以給墻壁涂漆。 工人站在離墻壁一定距離的地方,慢慢地把墨輥推上來。 在此過程中,桿子對墨輥的推力和涂料輥對墻壁的壓力為()
A. 減少,減少 B. 減少,減少
C. 減少,減少 D. 減少,減少
解決方案1:分析法
FN=mgtanθ,F=mg/cosθ
方案二:圖解法,如上圖。
例2:如圖所示,
彈性輕繩一端固定在O點,另一端連接有質量為m的小球a。 小球a通過一根不可伸展的繩子與相同質量的小球b相連。 兩個小球都處于靜止狀態(tài)。 現在給小球b施加一個力F,使彈性輕繩與垂直方向形成30°角,兩個球保持靜止。 下列說法正確的是(BC)
A、必須減小彈力繩的寬度
Ba 和 b 之間的繩子張力可能會減小
C. 力F的值可能小于mg
D. 力F的值可能大于mg
分析:研究對象的選擇應先整體再孤立。
示例:如圖所示,
物體A放置在水平地面上,通過定滑輪上的輕繩與球B連接,整個系統(tǒng)處于靜止狀態(tài)。 現在對球B施加一個水平力F,使球B輕輕上升一小段距離,物體A在整個過程中保持靜止,A與地面的摩擦力為Ff,那么在這個過程中( )
A.Ff變小,F變大
B.Ff變小,F變小
C.Ff變大,F變小
D.Ff變大,F變大
示例:如圖所示,
將物體掛在繩子的上端,用力F拉動物體,使吊繩與垂直方向的傾斜角為α,并保持平衡。 保持α不變,當拉力F有最小值時,F與水平方向的傾斜角β應為(C)
A.0B.π/2C.αD.2α
?最小原理法
示例:如圖所示,
兩個小球a、b的質量均為m,用細線將它們連接起來,懸掛在O點,此時用一個輕彈簧對小球a施加拉力F,使整個裝置處于a靜態(tài)時,Oa 與垂直方向平行 傾斜角度為 θ=45°,已知彈簧的剛度系數為 k,因此彈簧的變形不能為 ()
2.普通三角形
一種力的大小和方向都是確定的,另外兩種力的大小和方向是可變的,但受到一些約束。
示例:如圖所示,
建筑工人想要將建筑材料送到高處,往往會在屋頂上安裝一個定滑輪(圖中未示出),利用繩索AB通過滑輪將建筑材料提升到某個高處。 為了避免建筑材料與墻壁碰撞,站在地面上的工人還用繩子CD拉動材料,使其與垂直墻壁保持一定的距離L。 如果忽略兩根繩索的重力,則勻速提升建筑材料過程中繩索AB和CD的拉力F?和F?的變化為(A)
A.F?減少,F2減少
B. F? 減少,F2 保持不變
C. F?減少,F2減少
D. F?減少,F2減少
?根據角度的約束,制作一個閉合三角形,并比較邊長的變化。
3.等邊三角形
一個力的大小和方向是確定的,另外兩個力的大小相等。
?一般用于輕繩張力處處相等的活結問題。
整體分析:
分析b:
類型3:輔助圓法
圓的特點:直徑不變,可以表示力的大小不變; 恒定的圓周角可以代表兩個力的恒定的傾斜角。
1、一個力大小和方向確定(恒力),一個力大小確定但方向不確定(半變力),另一個力大小和方向不確定(未定力) 。
由于圓的直徑恒定,適當的力的大小保持恒定。
例:已知兩個共點力的合力為50N,分力F?的方向與合力F的方向成30°角,分力F2的大小為30N 。 但()
A.F?的尺寸獨一無二
B. F2 的方向唯一
C.F2 有兩種可能的方向
D.F2可以采取任何方向
例:在共點力合成實驗中,如圖所示:
用兩個彈簧秤A、B將橡皮條上的節(jié)點拉至某一位置O,此時兩根繩索組AO、BO的傾斜角度均大于90°。 現在保持彈簧秤 A 的讀數不變,改變其拉力方向,使 α 角變小,因此要保持節(jié)點仍處于位置 O,應調整彈簧秤 B 的拉力和 β 角,此時可行的調整方法有:()
A.減小B的拉力,減小β角
B、減小B的拉力,β角保持不變
C、減小B的拉力,減小β角
DB的拉力保持不變,但β角減小
【分析】
研究對象為節(jié)點O
2、一個力的大小和方向確定(恒力),另外兩個力的大小和方向不確定,兩個力的方向的傾斜角度保持不變。
由于圓周角恒定,因此兩個合適的力的傾斜角度是恒定的。
示例:如圖所示,
粗輕繩ON的一端O固定,中間某一點M綁重物,用手拉動繩的另一端N。 初始時,OM垂直,MN截短,OM與MN之間的傾斜角為α(α>90°)。 現在將重物拉至右上方并保持傾角 α 恒定。 OM從垂直拉向水平(AD)的過程中
A. MN上的張力逐漸減小
B. MN上的張力先減小后減小
C.OM的緊張氣氛逐漸減弱
D.OM 張力先減弱后減弱
示例:如圖所示的設備,
兩根細繩捕獲一個球,保持兩根細繩之間的傾斜角θ=120°不變,如果將整個裝置順時針輕輕旋轉90°,旋轉過程中,CA繩的拉力F?和CA繩的拉力CB繩拉力F2的大小變化為(BCD)
AF先變小然后變大
BF先變大后變小
C.F2 仍然變小
D.F2 最終變?yōu)榱?span style="display:none">tfF物理好資源網(原物理ok網)
解法一:解析法——正交分解(略)
解法二:解析法——余弦定律(略)
方案三:圖解法——輔助圓
例5:如圖所示,
粗輕繩ON的一端O固定,中間某一點M綁重物,用手拉動繩的另一端N。 初始OM垂直,MN剪短,OM與MN傾斜角度為α(α>90°),此時將重物輕輕拉至右上方,保持傾斜α不變。 OM從垂直拉向水平(AD)的過程中
A. MN上的張力逐漸減小
B. MN上的張力先減小后減小
C.OM的緊張氣氛逐漸減弱
D.OM 張力先減弱后減弱
解法一:解析法——余弦定律
解法2:解析法--輔助圓法
類型4:相似三角形法
物體在三個公共力點的作用下處于平衡狀態(tài)。 這三個力必須形成一個封閉的三角形,稱為力三角形。 力三角形與幾何三角形類似,對應邊成比例。
?閉合三角形是普通三角形,是利用相似三角形的方法想到的。
示例:如圖所示,
小球A和B具有相同的電荷,質量均為m。 兩個球都用長度為L的細絕緣線懸掛在絕緣垂直墻上的O點。球A靠近墻壁,其懸掛線正好垂直,而球B的懸掛線偏離墻壁。 與垂直方向呈θ角靜止,此時A、B兩球之間的庫侖力為F。由于外部感應,B球的電荷減少,兩球之間的庫侖力減半當兩個球再次靜止時,B球的電荷減少到原來的(C)
A.1/2B.1/4C.1/8D.1/16
變體:如圖所示,
圖4是簡單起重設備的示意圖。 AC 是一個沒有質量的支柱。 A端通過鉸鏈與垂直墻連接。 滑輪固定在 A 點正上方。C 端用于提升重物。 現在施加拉力 F 輕輕提起重物 在 AC 極到達垂直之前,物體 P 向下拉 ()
A、BC繩中的拉力FT越來越大
B. BC 繩索中的拉力 FT 越來越小
C、AC桿內的支撐力FN越來越大
D、AC桿內的支撐力FN越來越小
?研究對象為節(jié)點。
類型 5:余弦定律
示例:如圖所示,
粗輕繩ON的一端O固定,中間某一點M綁重物,用手拉動繩的另一端N。 初始時,OM垂直,MN截短,OM與MN之間的傾角為α(α>π/2)。 現在將重量拉至右上方并保持傾角α不變。 OM從垂直拉向水平(AD)的過程中
A. MN上的張力逐漸減小
B. MN上的張力先減小后減小
C.OM的緊張氣氛逐漸減弱
D.OM 張力先減弱后減弱
首先形成力的閉合三角形,然后利用余弦定律。
mg/sin(π-α)=F/sinθ=T/sin(α-θ)
?F=mgsinθ/sinα
?T=mgsin(α-θ)/sinα
示例:如圖所示,
垂直放置一個光滑的四分之一圓環(huán)AB,環(huán)上穿有由細線連接的兩個小球1和2。 最初,球2位于B點。此時,沿球1的切線方向對球1施加外力F,使整個系統(tǒng)緩慢上升,直至球1到達A點。如下表述:對于這個過程, is() 是正確的
A. 細絲中的張力逐漸減小
B、球1所受的合外力逐漸減小
C、球2的支撐力逐漸增大 D、外力F逐漸增大
類型6:正交分解法
示例:如圖所示,
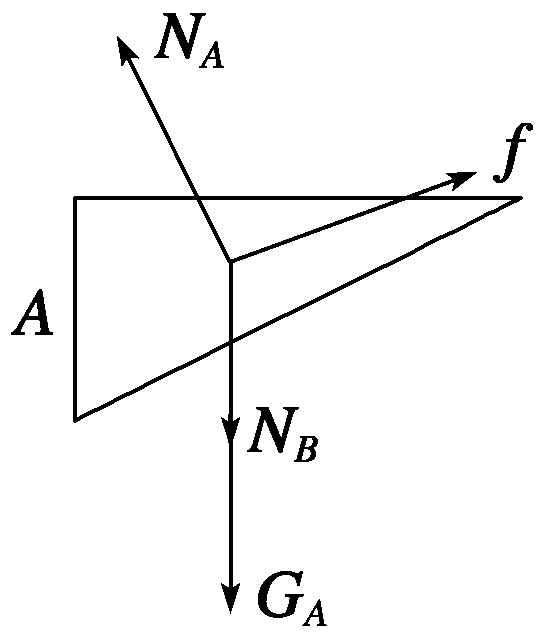
物體Q放置在固定的斜面P上,Q受到水平斥力F,Q處于靜止狀態(tài)。 此時Q遇到的靜摩擦力為f,現在水平力F變大,而物體Q仍處于靜止狀態(tài),那么有可能 (A,D)
AF還在變大
Bf還是變小了
Cf先變大后變小
df先變小再變大
示例:如圖所示,
人的質量為M,物體的質量為m,并且M>m。 如果忽略繩索與滑輪之間的摩擦力,當人拉動繩索向右邁出一步時,人和物體保持靜止,則下列說法正確的是(D)
A.地面對人的摩擦力減少
B、地面與人的摩擦力保持不變
C、人對地面的斥力不變
D.人對地面的斥力減小
示例:如圖所示,
OA是符合胡克定律的彈性輕繩。 它的五端固定在天花板上的點上,另一端與靜止在水平地面上且動摩擦素數恒定的滑塊A相連。 當繩子處于垂直位置時,滑塊A對地面產生壓力作用。 B是靠近繩索的光滑水平小釘子,它到天花板的距離BO等于彈力繩的自然寬度,有一個水平力F作用在A上,使A沿直線平穩(wěn)移動到向右,則在運動過程中 ( )
A.水平拉力F保持恒定
B、地面對A的摩擦力保持恒定
C、地面對A的摩擦力變小
D.地面對A的支撐力保持不變
第七類:數學(幾何)結合法
幾何約束和繩索長度約束等類型通常需要與幾何圖形相結合。
示例:如圖所示,
在垂直放置的圓頂形光滑支架上(下部為半方形,左右垂直),通過光滑的輕型滑輪,用不可伸展的輕型繩索懸掛重物G。 現將燈繩一端固定在支架上的A點,另一端從B點(B點為最低點)沿支架輕輕靠近C點(C點與A點同高)圓頂形支架)。 則繩索張力的變化為 ( )
A.先變大,然后保持不變
B.先保持不變,然后增加
C.先不變,后變小
D.先變小斜面上的摩擦力怎么求,后變大
示例:如圖所示,
水平地面上有一個木架,木架與地面的動摩擦力的質數為μ(0<μ<1)。 此時,對木架施加拉力F,使木架勻速直線運動。 設F的方向與水平地面相同,θ的傾斜角度為θ,在θ從0°逐漸減小到90°的過程中,木架的速度保持不變,則(A)
AF先減小后減小
BF仍然減少
CF仍然下降
DF先減小后減小
?也可以使用總反作用力法
類型八:等效法
示例:如圖所示,
一只螞蟻從半球形碗的底部沿著碗的內表面輕輕地爬下來。 球面的直徑為R,螞蟻與碗內表面之間的動摩擦力的素數為μ=√3,它能攀爬的最大高度為___。
?碗面相當于一個角度變化的斜坡。
示例:如圖所示,
糧倉運輸糧食示意圖。 麥粒離開傳送帶,在重力作用下垂直落下后,就產生了圓柱形的麥堆。 若麥堆底面直徑為r,麥粒間的動摩擦素數μ,最大靜摩擦力等于滑動摩擦力,不考慮麥粒的滾動。 那么生成的麥堆的最大高度就是_rμ__。
第九種:聯(lián)合力量
1、恒力合并
有兩個恒定力作用在物體上,這兩個恒定力可以合為一個力。
恒力合并始終是恒力,相當于等效引力。
示例:如圖所示,
晾衣繩兩端分別固定在兩根相同高度的豎桿上,忽略繩子的質量以及繩子與衣架掛鉤的摩擦力。 衣服原本是垂直站立的,當一陣風吹過時斜面上的摩擦力怎么求,衣服受到恒定的水平力而向右滑動,并保持靜止在新的位置。 然后與原來的相比,當處于新位置時(C)
A、鉤子左右兩側繩索的拉力不再相等
繩索B的張力必須保持恒定
C繩對吊鉤的斥力變大
D繩對吊鉤的斥力保持不變
2、總反作用力
滑動摩擦力與壓力(彈力)成反比,組合后方向不變(半變力),大小可以改變,稱為總反作用力。
示例:如圖所示,
螺孔與質量M的夾角為θ,在水平面上保持靜止。 當質量為m的鐵塊放在螺孔的斜面上時,它只是勻速下落。 如果用與螺孔斜面成角度a的力F拉動鐵塊,則鐵塊可以勻速上升,已知螺孔在整個過程中是靜止的。
(1)當α較大時,F有最小值,求此時α的大小和F的最小值;
(2) 當α=θ時,螺孔在水平面上的摩擦力是多少?
3、同一施力物體的力的組合
彈性力和摩擦力通常由同一物體施加并且可以組合。
示例:如圖所示,
物體在粗糙斜坡上向下的拉力F的作用下處于靜止狀態(tài)。 當F逐漸減小到物體相對于斜面正式向下移動時,斜面對物體的斥力可(AD)
A、逐漸減少
B、逐漸減少
C、先減少再減少
D、先減少再減少
類型10:三力匯聚
物體在三個力的作用下處于平衡狀態(tài),三個力的作用線必須交于同一點。
?行動要點不同。 在不旋轉的情況下,通過力的平移,力可以交于同一點。
例:兩根不可伸長的燈繩一端固定在O點,另一端分別固定在金屬直桿AB兩端。 已知金屬棒的質量為m,且分布均勻。 當地重力加速度為g,平衡時∠OAB=60°,∠OBA=30°,則輕繩OA的張力為FA,輕繩OB的張力為FB。
(二)
示例:如圖所示,
一根質量為m的均質細繩,一端系在天花板上的A點,另一端系在垂直墻上的B點。 平衡后,最高點為C點。測得AC段繩子的長度為BC段繩子長度的n倍,繩子末端切線與墻壁的傾斜角為α 。 試求繩子在C、A處分別受到的彈力? (重力加速度為 g)。
示例:如圖所示,
燈繩AC的一端固定在墻壁上,另一端系在燈桿的右端。 桿的上端靠在垂直的墻上。 桿是水平的。 燈繩與桿之間的傾斜角度為30°。 將質量為m=10kg的物體用繩子懸掛在桿的中點,整個裝置處于平衡狀態(tài),求:
(1)光纜交流段的張力;
(2)壁對桿的斥力。
第十一類:外星力量
當物體受到不在同一平面上的力時,物體處于平衡狀態(tài),且該力在任意同一平面上的分力(投影)的合力為零。
示例:如圖所示,
A、B為垂直墻上等高的兩點,AO、BO為兩根等寬的光繩,CO為光棒,旋轉軸C在AB中點D的正下方,AOB在同一直線上水平面。 ∠AOB=120°,∠COD=60°,若質量為m的物體懸掛在O點,則平衡后繩索上的拉力AO和桿上的壓力OC分別為()
第十二型:統(tǒng)一、溫柔
示例:如圖所示,
質量相等的小球A和B通過一根光棒連接起來,小球B通過一根細的、不可伸展的鐵絲掛在O點的墻上。 在垂直力F的作用下,小球A從圖中位置(ABO=90°)開始沿垂直光滑壁向下連接,直至燈條水平,細線始終處于緊繃狀態(tài)。整個過程中的狀態(tài)。 下列說法正確的是( )
類型十三:極限法
例:牙簽是中國人常見的飲食工具,也是中國飲食文化的標志之一。 牙簽漢代稱“箸”,唐代稱“箸”,元代稱“筷子”。 如圖所示,用牙簽夾住質量為m的球。 牙簽均在垂直平面內,牙簽與垂直方向的傾斜角度為θ。 為了使球靜止,求出每根牙簽對球的壓力范圍值。 已知球與牙簽之間的動摩擦力的質數為μ(μ < tanθ),最大靜摩擦力等于滑動摩擦力,重力加速度為g。
例子:在課堂上,老師規(guī)劃了一塊“L”形的光滑木板和三個相同、均勻、外表面光滑的圓錐形積木。 三個積木應如圖所示放置(剖面圖)
將模板堆放在木板上,則木板與水平面的傾斜角θ的最大值為(A)
A30°B.45°C.60°D.90°
?當左側兩個錐體中心連線處于垂直方向時,上錐體僅受到兩個力的作用,處于平衡狀態(tài)。 此時上錐體和右錐體相互接觸,沒有彈力。 此時 θ 的最大值為 30°,因此 A 是正確的。
例:垂直的外墻和水平的地面都是光滑且絕緣的,球A和B帶相同電荷,指向墻壁的水平推力F作用在小球B上,兩球靜止在垂直方向上分別為墻壁和水平地面,如右圖所示。
如果B球被向左推一點,當兩個球再次達到平衡時,與原來的平衡狀態(tài)(CD)進行比較
A.推力F變大
B、面向球A的直壁彈力變大
C.地面對球B的支撐力保持不變
D.兩球之間的距離變大
【分析】對于A、B,由總體規(guī)律可知,地面對球B的支撐力等于系統(tǒng)的重力,推力F與墻壁的支撐力FA平衡用極端的方法,即考慮B被推到角落時的狀態(tài),然后孤立A,很容易知道B對A的庫侖力是垂直向下的,與重力平衡of A. It can be seen that the force F is zero at this time, so it is the same as the with the state, the force F , and the F will . In other cases, the 's force needs to the of A and the force F, so the 's force will , the , so the the two balls to 's . It be noted that not all can be by , in other words, the use of is also to . The is used in with the limit , that is, to find the value at the of the , which its to . , be used with for non- . , when the asks about a force " first and then " or " first and then ", it may not be to use the .
Type :
means that the shaft is in a state or at a speed under the of on a shaft. At this time, the sum of the of each force is zero. That is, ΣM=0.
: As shown in the ,
One end O of the thick light rope ON is fixed, and a heavy is tied to a point M in the , and the other end N of the rope is by hand. , OM is and MN is cut short, and the angle OM and MN is α( α>π/2). Now pull up the to the upper right and keep the α . the of OM being from to (AD)
A. The on the MN
B. The on the MN first and then
The on the C.OM
on D.OM first and then
point O as the shaft, the of T is zero, and the is .
mgL?sinθ=FL?sin(π-α)=FL?sinα
?F=mgsinθ/sinα
θ↗?F↗
the O' point as the shaft, the of F is zero, and the is .
TL?sin(π-α)=mgL?sin(α-θ)
?T=mgsin(α-θ)/sin(π-α)
T=mgsin(α-θ)/sinα
T first ↗ then ↙
: A cone with a mass of m=50kg is the step. The h of the step is half of the r of the cross of the . As shown in the , it is the cross of the . The other end point, the point of with the step (point P in the ) is rough. Now it is to apply a force at point A on the in the , so that the can just start to roll on the axial step with P as the axis, then the of the force F is ___, and the force Fp of the step to the is large .
[] To pull the cone up to the high , the cone the point P. To the force , the of the force be , that is, the force is to the of AP, and then by the to find the force.
Point P is as the shaft, the of Fp is , the of the cone is with the of the force F, to make F as small as , and the of F be to AP, so that the force arm of F to point P is the , as shown in the right As shown in the :
P as the axis of , the size of F as √3mg/4, then take O′, A, and point as the axis of , and the force as mg/2 and the force as √3mg/4 to the , Fp The size is √7mg/4.
Or take the cone as the . From the force , it can be known that these three must be the same point force, and the force of the steps on the can be from the force .
Type 15: The of Work ()