進入21世紀以來,在嫦娥探月工程的推動下,各國深空探測的重點逐漸轉向月球。 其中,月球南極最為引人注目,因為月球極地地區擁有兩大戰略資源:
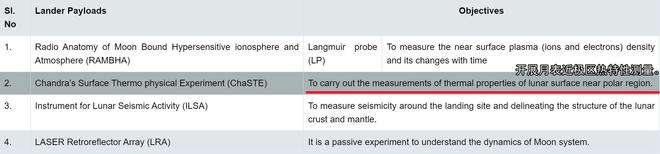
首先是連續照明。 月球的兩極地區與地球的兩極地區一樣,也有極晝和極夜。 極晝意味著探測器的太陽能電池可以接受長期持續的光照,從而大大延長工作時間,而不必像玉兔二號測試那樣經常面對月夜。 月球極地地區也有高山地形,一些高地即使在極夜也被照亮,進一步延長了全年日照的持續時間。
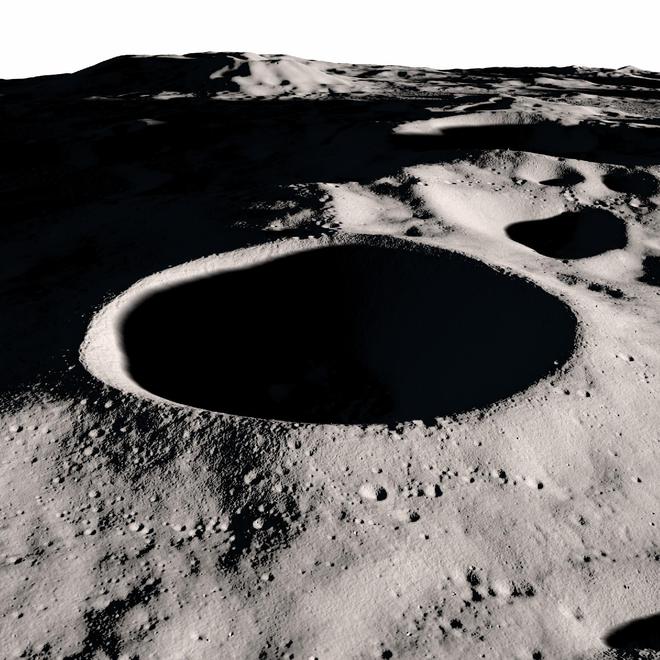
在月球南極的沙克爾頓隕石坑中,你可以看到連續照明區域和永久陰影區域之間的間隙。
然后是水資源。 根據嫦娥五號采集的月壤研究分析,月球上確實有水,甚至遍布月球。 繞月衛星的觀測數據也表明,月球兩極地區水資源更為豐富,因為存在極夜現象,加上地形遮擋,并且存在永久陰影區。 那里的水資源以冰的形式存在,與其他地區相比,水資源更容易開采。

嫦娥五號月球表面采樣片段
有了水,它不僅可以為宇航員提供生存和生活用水,還可以產生氧氣,甚至可以用來制備氫氧發動機所需的推進劑。 是未來月球可持續低成本探索開發的戰略資源。
我們之所以關注月球南極而不是月球北極,是因為水冰資源更集中在月球南極。
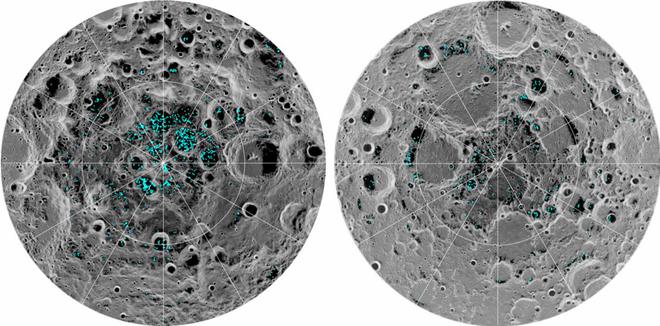
月球南極(左)和北極(右)表面的冰分布。 藍色代表冰的位置。 圖片中的黑色陰影區域更涼爽。
針對這兩大戰略資源,目前已有兩艘人力探測器正在進行中。 一個是已經進入月球軌道的印度“月船三號”探測器,另一個是同樣踏上月球之旅的俄羅斯“月月”探測器。 25英寸探測器。

“春25”探測器
“Luna-25”探測器對于俄羅斯航天至少具有三大意義:
1、是俄羅斯32年來首次發射月球探測器;
2、是俄羅斯32年來首次成功發射深空探測器;
3、暫停近半個世紀的“探月系列”探測器發射任務重新啟動,有望恢復登陸月球的能力。
然而,作為世界一流的航天強國,俄羅斯的“春25”探測器并沒有表現出與其航天地位相稱的實力。 不僅在登月技術能力上無法與嫦娥系列著陸器相比,甚至還落后于印度的月船號。 第三,這個結論與一般公眾的認知不一致,但它是現實。 本文就來看看“春25”探測器的背景……
為什么“Chund-25”在月船3號先抵達半個多月后才發射?
按照計劃,“春25”將比“月船3號”更早登陸月球。 這是因為兩個探測器遵循不同的軌道。 “春二十五號”直接進入地月轉移軌道,免去了月船三號借助地球引力加速升軌的需要。
難道是因為發射“春25”的火箭能力更強? 不。
發射-25的聯盟1.5b火箭的順月轉移軌道容量為2.35噸,而發射-3的LVM3-M4火箭的順月轉移軌道容量為2.38噸。 印度火箭的運力甚至略高一些。 比俄羅斯的火箭還要好。

聯盟號 1.5b 運載火箭發射 Luna-25 探測器

發射月船 3 號的 LVM3-M4 運載火箭
月船三號之所以未能直接進入地月轉移軌道,是因為它要承擔更多的任務,導致探測器重量更重,達到了3.9噸嫦娥一號探測器,超過了LVM3的地月轉移軌道能力-M4火箭。 。
也就是說,如果用俄羅斯聯盟號1.5b火箭發射印度月船三號,也將無法直接進入地月轉移軌道。 如果用印度LVM3-M4火箭發射俄羅斯“月球25號”,也可以直接進入地月轉移軌道。
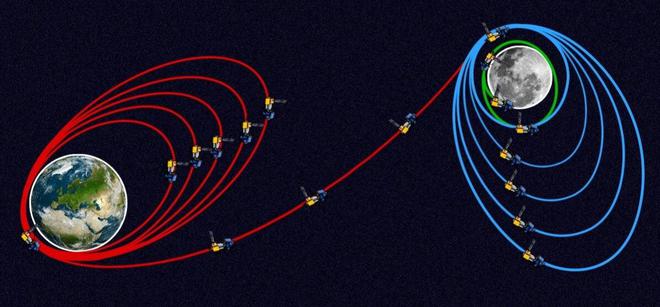
月船三號地月轉移飛行軌道示意圖
“月球25號”地月轉移飛行軌道示意圖
俄羅斯“春25”只有一個著陸器,只能在月球表面進行原位著陸探測,而月船三號不僅可以進行原位著陸探測,還攜帶月球車。 為了讓月球車駛離著陸器到達月球表面,還需要一個支撐坡道轉移機構。 這些都是重量,僅靠著陸器無法保證,因此需要額外的推進模塊。 這使得印度月船3號的重量猛增。

整個-3任務的合影
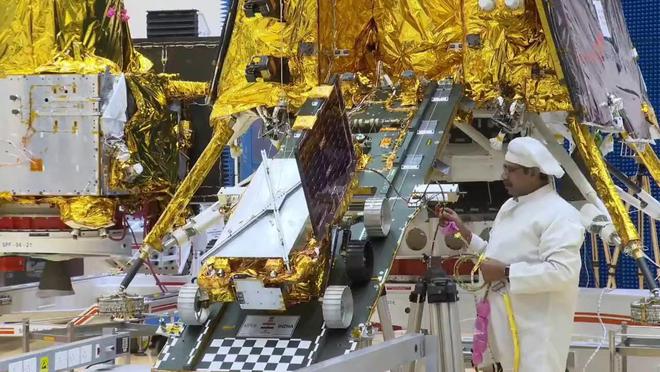
月船三號月球車離開著陸器進行測試
對了,“春25”還計劃搭載月球車,但由于預算問題,最終未能搭載。
“運25”能夠直接進入地月轉移軌道,是它先行的原因之一。 另一個原因是,完成近月制動后,探測器可以直接進入平均距離約100公里的月球目標。 軌道方面,不需要像月船三號那樣先進入遠月點較高的大橢圓軌道,然后逐漸降低軌道,這會花費大量時間。
繞月軌道的差異,其實和能否直接進入地月轉移軌道的原因是一樣的。 這是由于探測器的重量不同以及配置的功率提供的速度增量不同造成的。
歷經18年的艱難誕生,“月球25”能否恢復俄羅斯航天往日輝煌?
“春25”延續了月球系列的命名慣例,也有重振過往航天輝煌的意義。 距離月球探測器“春二十四號”上次執行任務已經過去四十七年了,這已經成為過去式了。

近半個世紀前的“春24”探測器是一次樣本返回任務
盡管俄羅斯的航天工業相比前朝已經發生了很大的變化,但Luna-25仍然盡力利用僅存的少數技術遺產。 例如,著陸器配備了同位素核心,可以在月球夜間提供熱量和電力。 電源使其設計壽命遠超月船三號,并且配備了可以挖掘月壤的機械臂。
“月球25號”與“月球24號”之間有近半個世紀的時間差距,這意味著服務探月的配套產業鏈、人才隊伍、任務經驗傳承早已不復存在。 如果我們想要重建那是多么困難。 在Luna-25之前,俄羅斯航天公司還曾發射過Mars-96和-Soil兩個深空探測器,但均以未能重新進入地球大氣層而告終。
“福布斯-土壤”探測器最終重新進入地球大氣層并被摧毀
另一個例子是“Chun-25”項目。 這個項目早在2005年就啟動了,十八年來制作艱難,啟動延期的次數已經不計其數。 一再拖延的背后是俄羅斯航天工業的系統性缺陷。 許多關鍵設備過于依賴國外,無法自行研發制造。
無法打造關鍵設備,俄羅斯Luna-25只能盲目登陸月球
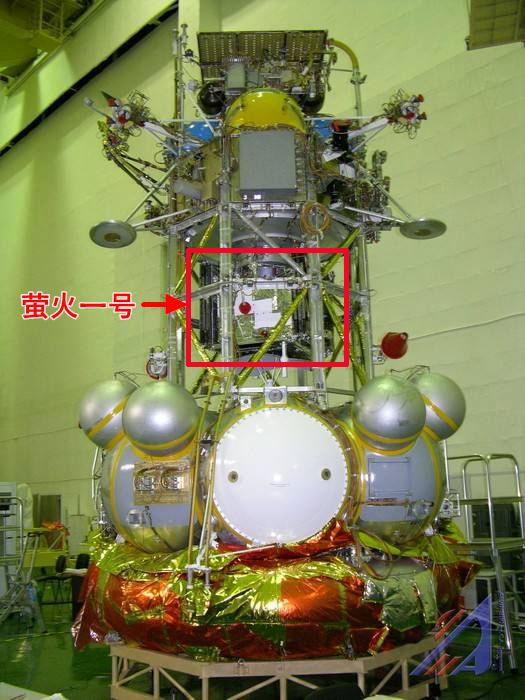
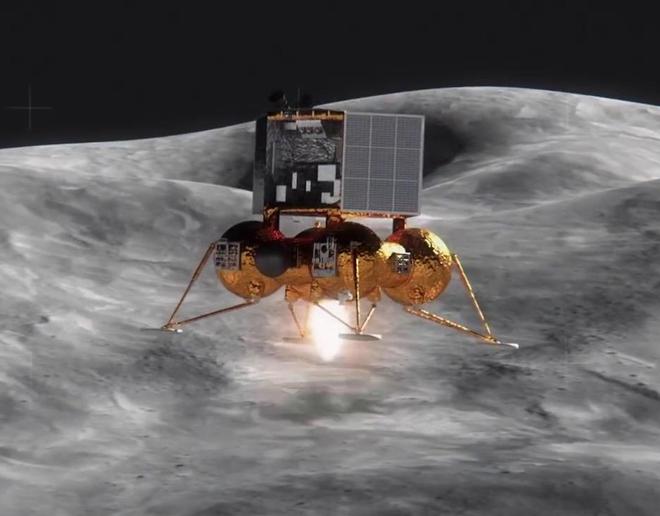
發射質量為1.8噸的“春25”探測器分為上下兩部分。 上部為有效載荷儀器艙。 太陽能電池也布置在有效載荷儀器艙的側壁上。 它是為了適應太陽高度角較小的高緯度地區登月而設計的。 受光情況下,下部是推進艙,有四個外接油箱。

正在進行總裝過程的“春25”探測器
大多數蘇聯和俄羅斯的深空探測器都采用這種布局。 這主要是因為它們在探測器減重技術方面存在缺陷。 許多部件無法小型化,但減輕重量是深空探測器的迫切需求。 所以他們只能想辦法通過簡化溫度控制措施來減肥。

“月球25”號已貼上隔熱膜,完成總裝。
整個探測器沒有復雜的流體回路溫控系統,燃料箱僅覆蓋有隔熱膜,有效載荷儀器艙上部僅輔以散熱蜂窩板。 這樣的設計可靠性通常很難保證,這也是為什么蘇俄深空探測器故障率高的原因之一。
靠近油箱還配置了四個著陸腿,以緩沖著陸沖擊能量并支持著陸器的原位探測。
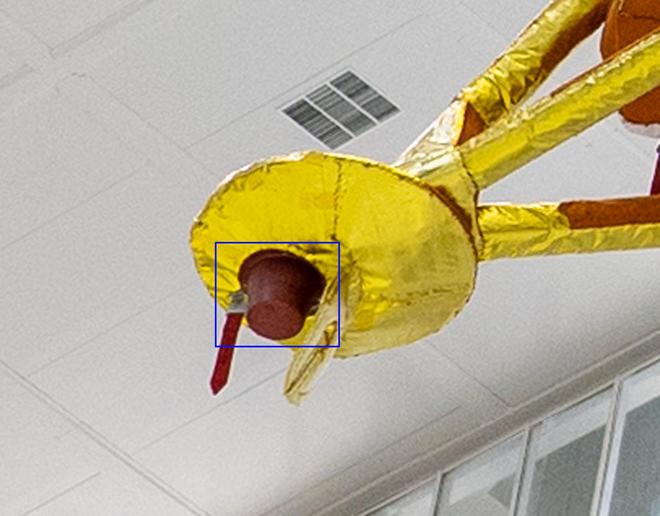
“Chund-25”推進模塊的主要動力是一臺4700N的可變推力發動機。 推力變化范圍為83%至100%,與印度-3的四臺800N可變推力發動機的可變推力范圍類似。 相比之下,我們的嫦娥三號、嫦娥四號、嫦娥五號這三個著陸器的主要動力是7500N可變推力發動機,推力變化范圍為16%至110%。
主動力可承擔軌道控制、著陸和下降減速任務。 由于Lunar-25的可變推力能力有限,它額外配備了兩臺600N小推力發動機,可以精確微調探測器軌道,也是著陸和下降的最后階段。 主要驅動力。 此外,還有12臺小型發動機用于姿態控制。
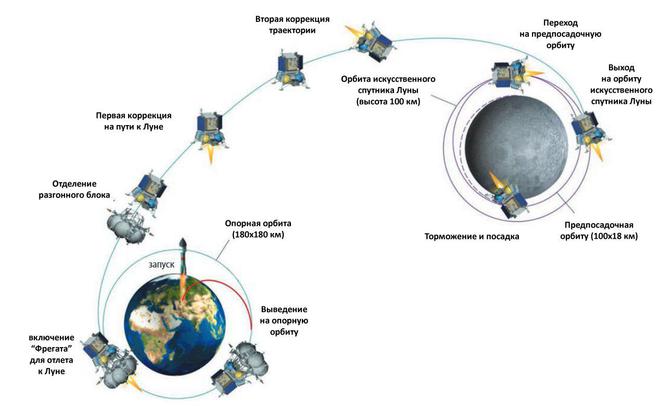
當測控時間窗口和著陸區照明條件滿足要求后,“月球25”即可開始登月作業。 首先,它會從100公里的圓形軌道下降到近月點的18公里的橢圓軌道,然后從這個高度開始下降。 登陸月球。
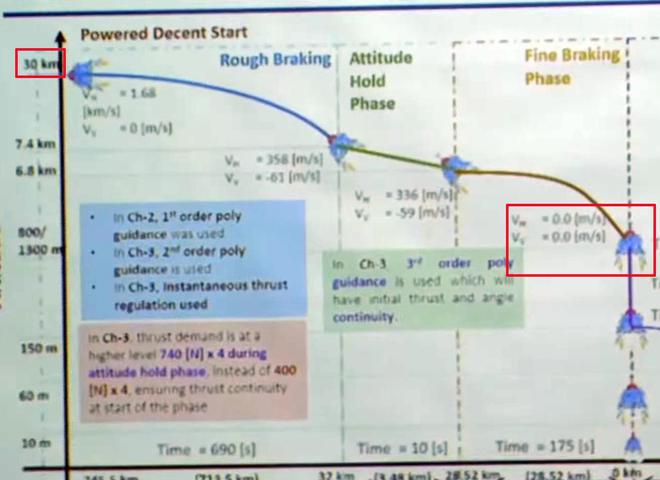
相比之下,月船三號登月起點為30公里,嫦娥三號登月起點為15公里。 海拔越高,登月路程越長。 這與主機減速有關。 能力是直接相關的。 無論是“春二十五”還是月船三號,它們的主動力都無法與我們的7500N變推力發動機相比,所以我們登月的起點較低。

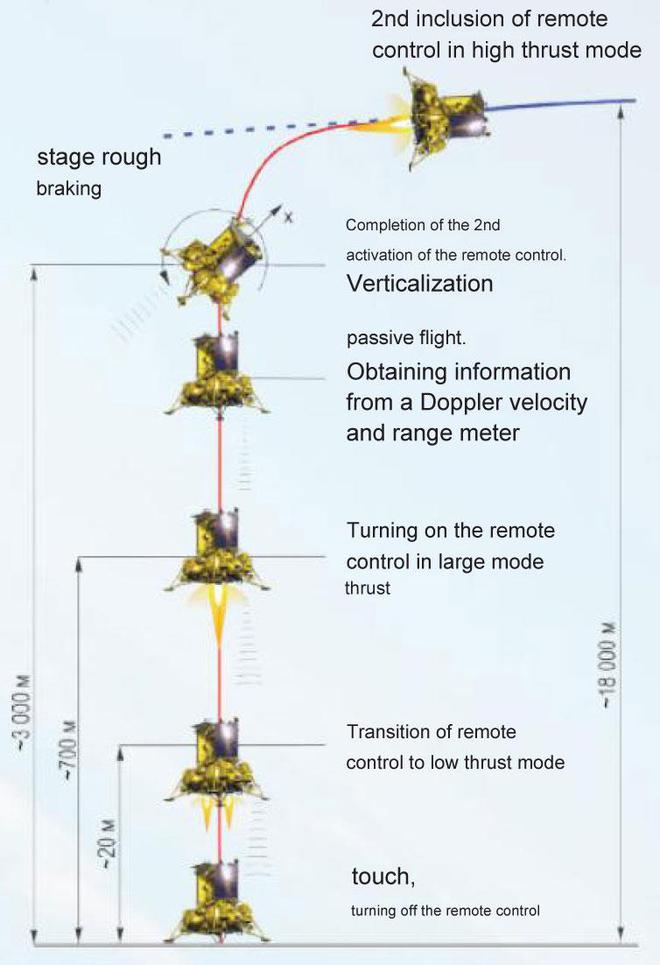
越過登月起點高度后,“春二十五”進入動力減速階段。 這一階段主要是通過主機大幅降低飛行速度,同時高度不斷降低。 當到達3公里高度時,探測器進入調整階段。 ,姿態逐漸變為垂直下降。 當到達700米高度時,反推進力工作在最大推力狀態,當距離月面僅20米時,反推進力工作在小推力狀態。

當嫦娥系列著陸器距離月球表面兩三米時,伽瑪關閉傳感器將向主機發送關閉信號。 最終著陸沖擊能量將被著陸后退所吸收。 提前關閉的目的是盡量減少月球塵埃造成的干擾。
嫦娥系列著陸器的反推力發動機在接觸月面之前關閉,以減少月球塵埃的干擾。
“春25”僅在著陸腳墊上安裝了接觸傳感器,這意味著著陸器只有在接觸月面后才能關閉主機,來自月球塵埃的干擾會更加嚴重。
“春25”著陸器腳墊上布置的“接觸傳感器”
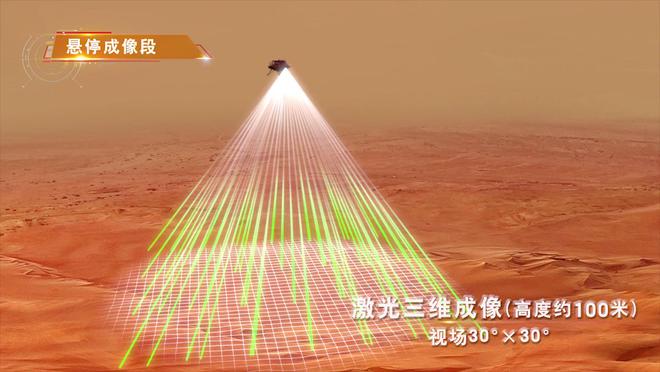
“Chund-25”在整個登月過程中沒有懸停。 相比之下,印度的月船三號可以懸停在距離月球表面約1300米的高度。 我們的嫦娥三號、嫦娥四號、嫦娥五號都可以懸停在月球上方100米的高度。
懸停的目的是識別著陸區域的障礙物并選擇安全的著陸地點。 “月球25”之所以沒有懸停,是因為它不具備識別障礙物和選擇安全著陸地點的能力。 這不僅僅是說說而已,因為俄羅斯科學院太空研究所的原始報告是這樣寫的:著陸器在著陸階段沒有主動機動系統。
俄羅斯科學院空間研究所官網證實“Luna-25”不具備末端機動能力
這意味著什么? 這意味著俄羅斯“Luna-25”探測器要扭轉歷史。
回望20世紀,除了有宇航員參與駕駛的阿波羅登月計劃外,人類發射的登月無人著陸器并不具備著陸末端障礙物識別和機動避讓的功能。 這些著陸器只能選擇一大片開闊平坦的區域,沿著設計的軌跡墜落。 沒有障礙物識別和機動避讓功能,故障率較高。 這就是“盲著陸”。
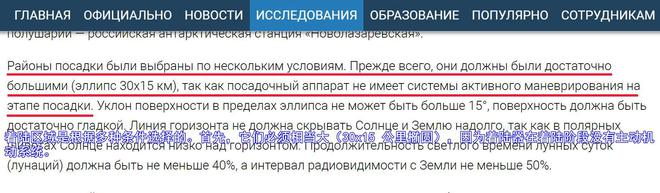
“Luna-25”探測器選擇了一個大的開放平坦區域。 俄羅斯科學院空間研究所官網這樣寫道:著陸面積一定相當大,著陸橢圓為30公里×15公里,因為著陸器在著陸階段沒有主動機動系統。
舉個通俗的例子,所謂盲降,就像從A城市飛往B城市,飛機知道航線,但到達B城市后卻找不到機場。
人類無人探測器盲目登陸月球的歷史,以我國嫦娥三號探測器為結束,該探測器首創了“粗避障+精避障接力避障方案”,可首次利用千米級光學成像靈敏度。 飛行器先進行機動避開較大障礙物,然后懸停在月球百米高度,識別著陸區更精準的障礙物地形,選擇安全著陸點,再進行機動避讓,最終保證著陸的高度可靠和安全。安全登陸月球。
嫦娥三號著陸器
俄羅斯“Luna-25”探測器沒有障礙物識別和機動功能,意味著回到了20世紀盲目登月的老路。
為什么需要具備著陸末端障礙物識別和機動功能?
盡管人類現在可以獲取月球表面的高分辨率照片并提前選擇安全著陸地點,但在著陸月球的過程中,探測器首先遭受了軌道偏差和反推力發動機的推力偏差。 數千英里,這些偏差足以導致著陸器偏離事先選定的安全著陸點。
那么,如何確保自己不會在陌生的著陸點掉入深坑或巨石中呢? 因此,為了提高登月成功率,必須具備障礙物識別和機動避讓功能。 從這個核心功能來看,俄羅斯的“Chund-25”落后于印度的“月船3號”。

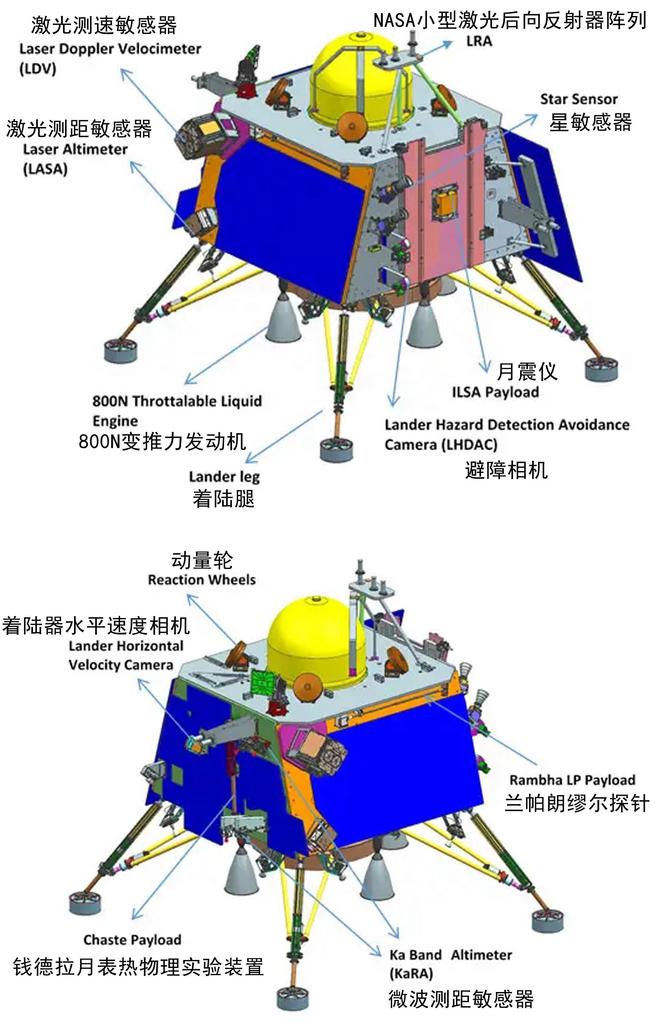
印度月船三號著陸器的避障相機
雖然月船三號的障礙識別和機動避障能力不如嫦娥三號的粗避障+精避障的接力避障,但它仍然有一雙能夠識別障礙物的眼睛。 它可以在1300米的海拔高度運行。 懸停,使用光學成像傳感器識別更大的障礙物并選擇更安全的著陸地點。
月船三號著陸器具有懸停、終端障礙物識別和機動能力
為什么俄羅斯的Luna-25不具備識別障礙物的能力? 事實上,別說障礙物識別,他們連盲登月球的資格都極其困難。
最初,“Luna-25”計劃攜帶一臺名為“COU”的光學相機,由歐洲航天局提供。 這款相機原本具有對較大障礙物進行粗略避障的能力,但后來由于眾所周知的戰爭因素,ESA COU光學相機有效載荷從俄羅斯“Luna-25”探測器項目中撤回,因此不再使用具有在末期自主識別和操縱障礙物的能力。

在“春25”探測器的早期宣傳視頻中,它能夠識別終端障礙物并進行機動,但現在已經不具備這個功能了。

ESA的COU光學相機退出Luna-25項目
為何“春25”連盲目登月資格都困難? 因為即使是盲目登陸月球,也需要速度和距離測量功能,以確保著陸器能夠沿著設計的軌跡飛向目標區域。 俄羅斯自主研發的微波測距速度傳感器的研制過程也相當坎坷。 由于研制進度無法保證,探測器的發射時間一再推遲。
與印度月船三號相比,“春25”探測器登月保障能力更差
主要體現在測距和測速能力的差異,“春25”探頭經過一番努力才具備微波測距和測速功能,而印度的月船3號則配備了激光測距、激光測速、基于避障功能設計了微波測距、水平測速攝像頭、位置檢測攝像頭等一系列互為備份的傳感器。 后者還配備了著陸器危險檢測和規避攝像頭。
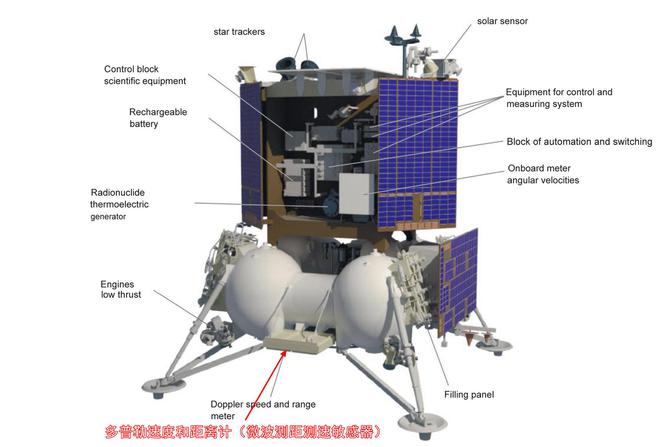
“春25”唯一的測距測速傳感器是“多普勒速度測距儀”
-3的距離和測速配置更加完整。
“Chund-25”探測器所表現出的自力更生能力也弱于印度的月船3號,因為早在月船3號的前身月船2號的任務階段,人們也計劃外包激光速度傳感器,但由于我買不到,所以我開始自己研究。 雖然月船二號最終未能登陸月球,但激光速度傳感器在整個過程中都正常工作,而且這個有效載荷的研制仍然是成功的,而且這已經是很多年前的事情了。
盲目登陸月球的失敗率是多少?
以探月系列為例,共開展11次月球采樣返回任務,其中僅3次成功,5次因運載火箭故障失敗,2次因未能實現軟著陸失敗,1次因未能實現軟著陸而失敗。到落地后翻倒。 即使不計算因運載火箭故障而導致的失敗次數,探月系列盲目登陸月球的失敗率仍然高達50%。
以NASA勘測者系列著陸器盲著陸案例為例。 該系列共有7次任務,其中2次失敗,失敗率約29%。 其中,測量者3號被高反射率巖石迷惑了。 測距傳感器和下降引擎未能及時關閉嫦娥一號探測器,導致著陸器在月球表面彈跳兩次。 幸運的是,著陸器完好無損。
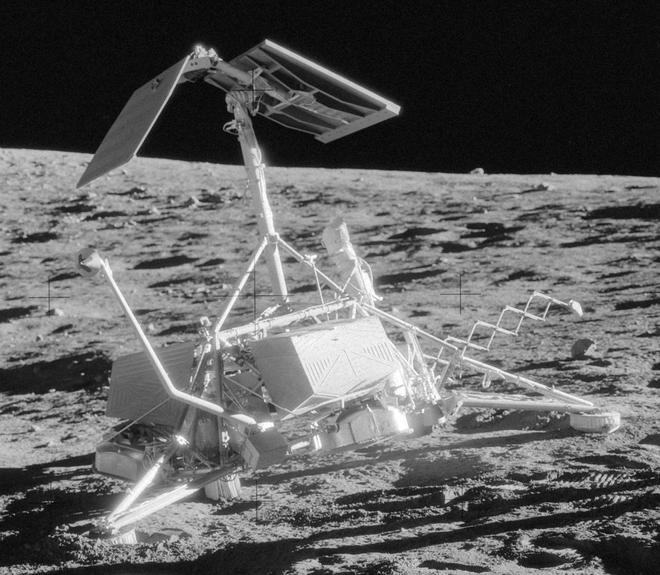
測量者三號著陸器只能在月球上進行盲著陸,在著陸月球表面時發生了兩次彈跳。 這張照片是由阿波羅12號宇航員拍攝的。
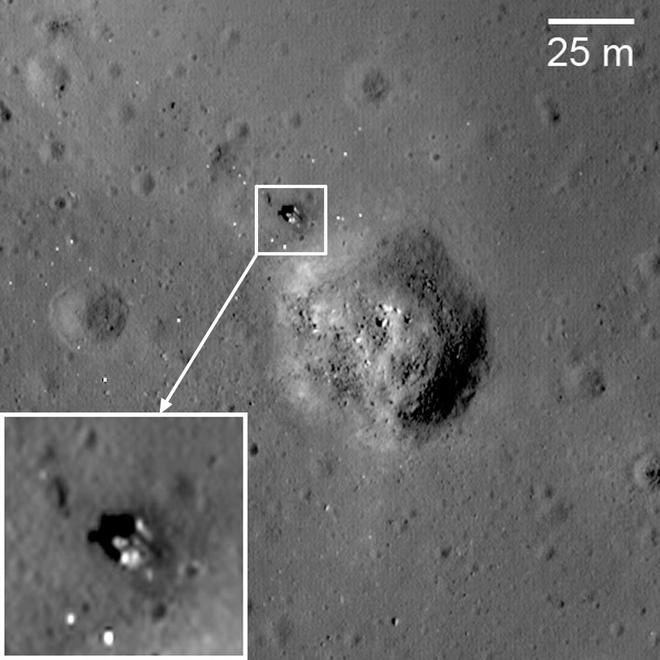
從LRO月球勘測軌道器拍攝的“月球24號”樣本返回探測器著陸臺遺址可以看出,這里距直徑60多米的撞擊坑邊緣僅十幾米。 。 從下圖不難理解,為什么在沒有自主障礙物識別和機動避讓能力的情況下,探月系列采樣返回任務的失敗率高達50%(不包括運載火箭故障):
盲目登陸月球并非不可能。 失敗率需要多個任務才能更直觀的展示。 因此,如今的俄羅斯“Luna-25”登月任務還是有成功的概率的。 通過對比“探月系列無人樣品返回任務”和“測量者系列登陸任務”,我們可以看到,即使是盲目登陸月球,也有不同程度的技巧。 后者的成功率明顯高于前者。 這也要看基本功是否扎實。 ,例如測距和速度傳感器的可靠性。 基于此,誕生于21世紀的“春25”即使采用盲目著陸方案,成功率也比以前更高也是情理之中的事。
無人探測器著陸地外物體障礙物識別和機動能力的天花板是嫦娥系列著陸器
如上所述,嫦娥三號結束了人類無人探測器盲目登陸月球的歷史。 依靠粗略避障+精細避障的接力避障技術。 為了進行粗略的避障,可以在更高的高度使用光學成像傳感器。 對于機動躲避較大障礙物來說,月船三號的避障能力與我們的粗略避障能力基本相當。
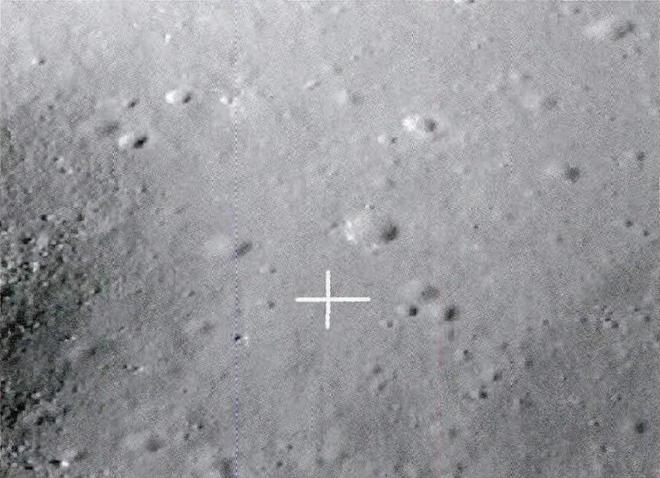
嫦娥三號首次避障(粗避障)光學成像傳感器拍攝的圖像,以及選定的著陸地點。
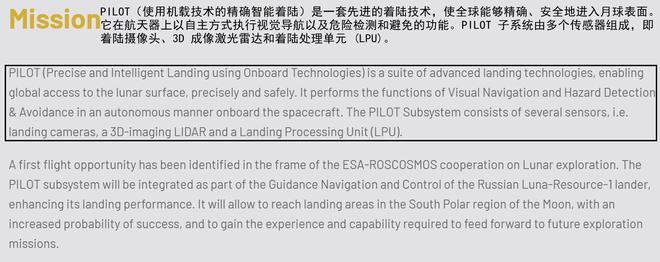
更復雜的是精準避障。 說到這里,讓我們回到歐洲航天局用于疏散Luna-25探測器的COU光學相機。 其最終目標是開發精確的智能著陸系統(PILOT)。 ,這是由著陸攝像頭、3D成像激光雷達、著陸處理單元組成的智能著陸系統。 它可以自主識別著陸障礙物并選擇安全著陸地點。 計劃到2025年研制成功,并用于NASA的阿爾忒彌斯計劃。
研發的難點之一是3D成像激光雷達。 你覺得這個有效載荷看起來很熟悉嗎? 是的,它與我們嫦娥系列著陸器上配置的激光三維成像傳感器是同一類型的負載。 這是什么意思? 這表明,我們早在十年前就已經研制成功了西方世界夢想的登月設備,并通過了嫦娥三號成功登月的實際飛行試驗,而他們還在研制的路上。

激光 3D 成像傳感器
截至目前,我國仍然是世界上唯一成功研制激光三維成像傳感器并通過飛行任務測試的國家。 NASA也早就有計劃了,但是還沒有成功。

嫦娥三號瞄準激光三維成像傳感器選定的著陸點,避開障礙物,緩慢下降
激光三維成像傳感器與激光測距傳感器相結合,可對百米高度的著陸區域進行多光束快速三維成像,對圖像數據信息進行網格處理,然后通過螺旋算法。 這項技術不僅保證了嫦娥系列登月任務100%的成功率,而且還應用到了天問一號火星探測器的著陸平臺上,讓我們創造了一次發射實現火星探測和繞軌的能力。 。 這是前所未有的偉大成就。 我們并不止于此......
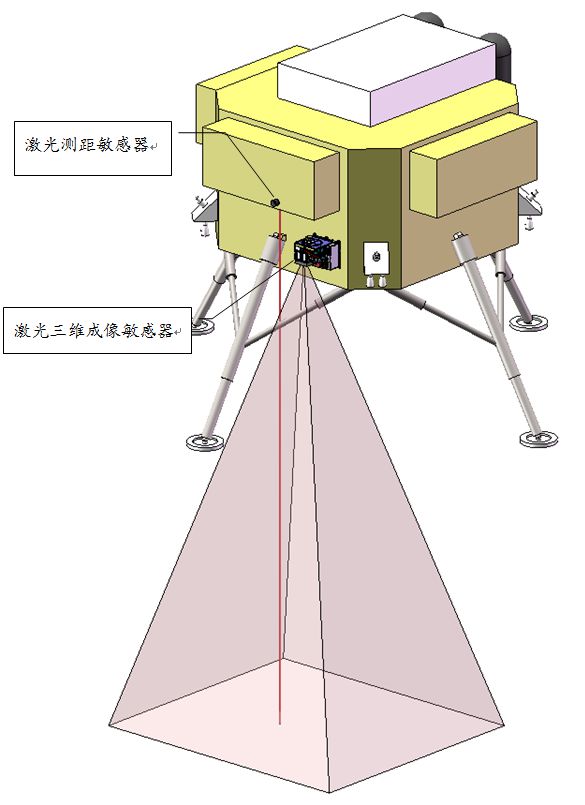
嫦娥系列著陸器基于激光測距傳感器和激光三維成像傳感器的結合,繪制著陸區域的高精度三維地圖。
天問一號火星探測器著陸平臺激光3D成像
媒體宣傳“月船三號”和“月船25號”都想奪得世界第一的月球南極登陸任務的稱號。 他們真的要去月球南極嗎?
我們先來看看這兩兄弟的登月位置:

-3首次預定著陸地點:南緯69.367°,東經32.348°(曼西努斯隕石坑和辛佩留斯隕石坑之間);
“Luna-25”的首選著陸地點:南緯 69.5°,東經 43.5°(博古斯拉夫斯基隕石坑以北)。
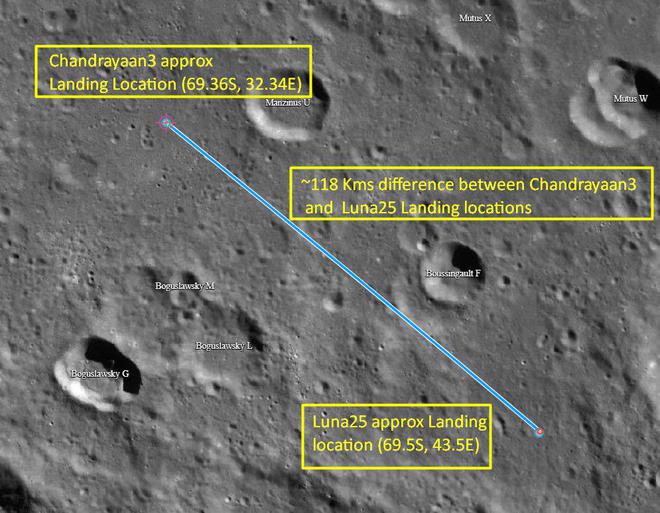
月船3號和月船25號的著陸點相距僅100多公里。
如果參照地球兩極的緯度劃分,這兩個坐標位置可以視為南極。 不過,必須強調的是,月球不是地球。 如果硬要把地球的標準套用到月球上,無異于“刻舟求劍”。
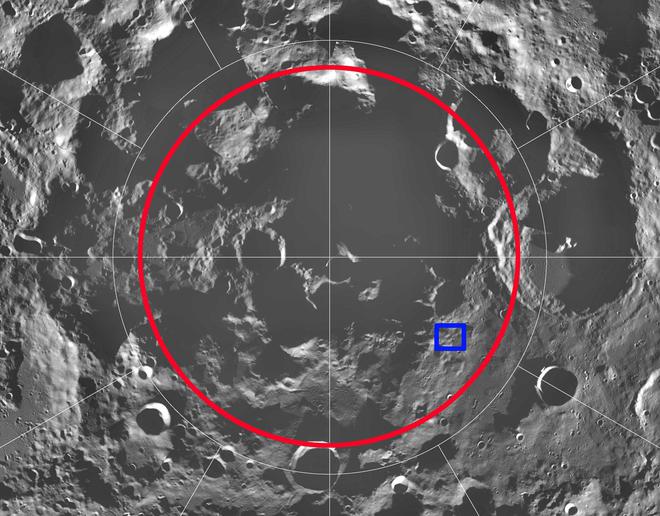
根據黃道面與月球黃道面夾角計算,月球極區的緯度為南北緯86°。 顯然,他們降落的地點并不是月球的南極地區。
圖中紅色方框為月球南極,具有極晝極夜現象。 -3和Chand-25的著陸點甚至無法在這張圖中標記出來,因為它們著陸點的緯度不高于南極。 緯度70°。
對于這個問題,印度空間研究組織是務實的。 事實上,在任務介紹中,已經明確表示這里是“近極地”,而不是真正的極地。
-3官網加載功能介紹
人類對月球南極的探索仍需依靠“嫦娥七號”任務
在嫦娥探月工程的刺激下,很多國家立志登陸月球,很多國家都想去月球南極。 然而,就像月球背面一樣,想去也去不了。 主要技術瓶頸之一是溝通。

人類第一顆地球軌道外專用中繼通信衛星:鵲橋
鵲橋中繼衛星視野中的“地月系統”
沒有中繼衛星就不可能在月球背面部署探測器,就像嫦娥四號的鵲橋中繼衛星一樣。 同樣的道理,如果沒有中繼衛星,登陸月球真正的南極點就更加困難了。
以印度的月船三號為例。 雖然它降落的不是月球南極地區,而是高緯度地區,拓展了推進艙的中繼通信功能。 但推進艙軌道周期短,著陸器中繼通信困難。 通信支持非常有限,因為架空推進模塊中繼通信的壽命太短。
再看,俄羅斯“春25”降落的緯度比“月船3號”略高。 為什么不使用中繼衛星? 這是因為月球的平衡現象使得月球的高緯度地區在一定時間內對地球可見,但即使可見也會被地形阻擋而中斷通訊。 因此,如果沒有繼電器衛星的支持,即使月亮著陸成功,即使有核電支持,也會非常低。

由于農歷平衡現象的存在,人類可以從地球上觀察到59%的月球表面,而不僅僅是月球的前側。
除了我的國家,在整理了其他國家的月球南極著陸勘探計劃之后,可以看出,只有 1的預先選擇的著陸區和NASA商業月球有效載荷計劃中的直覺機械公司 2位于月球南緯86°。 在南部,有 3任務,旨在將人類返回月球。
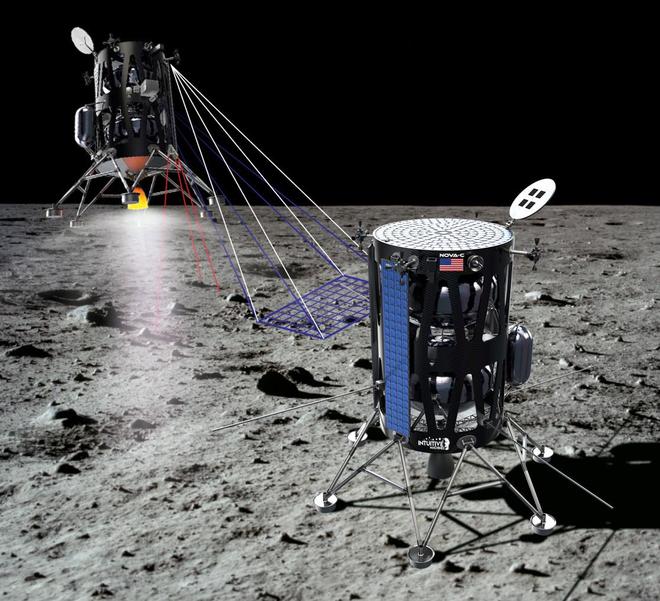
美國直覺機械的Nova-c登陸器計劃使用與Chang'e 3:激光三維成像傳感器相同類型的避免障礙設備。
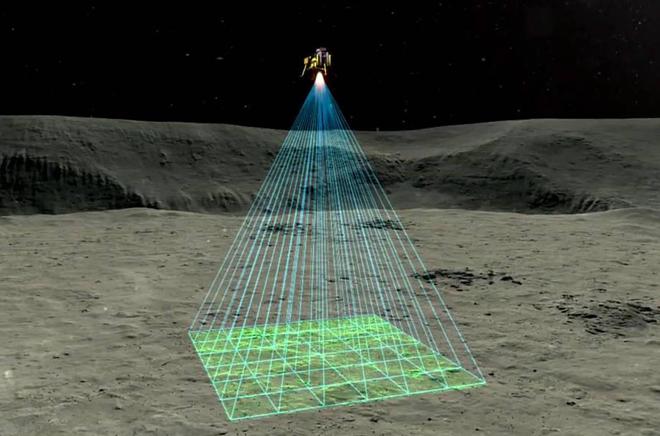
Chang'e系列徘徊在100米高的高度,激光三維成像效果圖。
NASA計劃在Lunar South Pole上降落的兩名無人陸地機構可能會推遲發射,而登陸者的設計壽命只有十天。 為什么這么短? 不是說月亮南極連續照明嗎? 是因為沒有電嗎?
目前,限制其設計壽命的因素不再是能量,而是主要溝通。 這些著陸器不受繼電器衛星的支持。 他們依靠月球平衡現象,導致月球南極可見。 目前,不需要中心。 衛星也可以交流,但是時間段很短。 地球只能看到每個月的一半,與地球的交流高度不得超過6.5°。 這就是為什么NA??SA的兩個Lunar South Pole登陸探針具有超過十天的原因的設計壽命。
至于 3載人的月球著陸任務,看著命運不佳的星際飛船,您將知道他們在2025年返回月球的計劃是多么不可靠。
世界各地的人們都在尋找月球的南極著陸任務,但是環顧四周,我們仍然必須看我們的又一ange 7
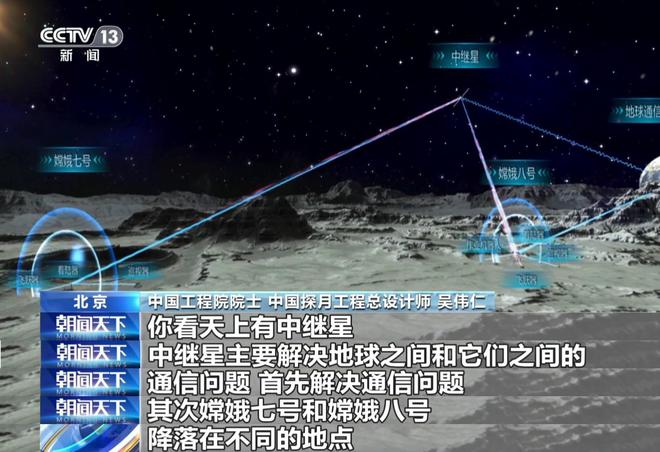
幾個月后,將推出為Chang'e-7 Lunar South Pole勘探服務的-2接力賽衛星。 衛星將在大型橢圓形軌道中運行。 在這個軌道上,軌道維護基本上是不必要的,并且燃料消耗極高。 更少,因此設計壽命可以長達八到十年。
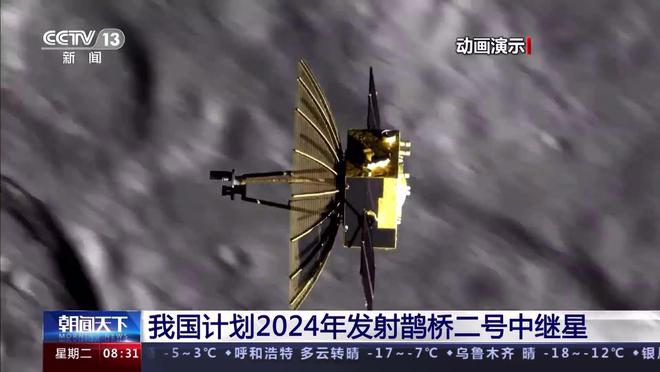
大橢圓形冰凍軌道的遠月點位于月球的南極側,確保繼電器恒星懸掛在月球南極上方的高度長時間。 溝通不僅持續更長的時間,而且 2可以同時為十個探測器提供基礎。 Lunar接力通信不僅可以為多服務器Chang'e-7服務,而且還可以滿足Lunar 的接力通信需求。
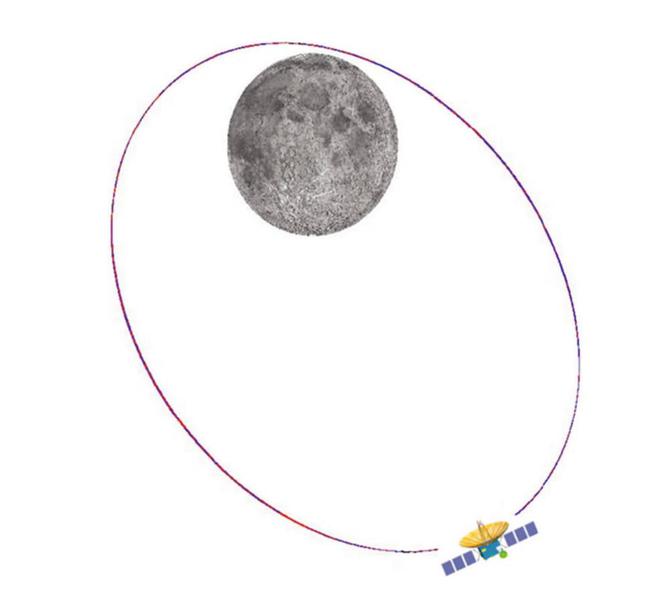
大橢圓形冰凍軌道
2最初是Chang'7不可或缺的一部分,但由于軌道可操作性并為Chang'e 6 Lunar 樣本返回任務提供服務, 2提前啟動。
-2最初是Chang'e-7檢測器的組成部分(檢測器的頭部)

chang'e-7配置剝離了-2接力星
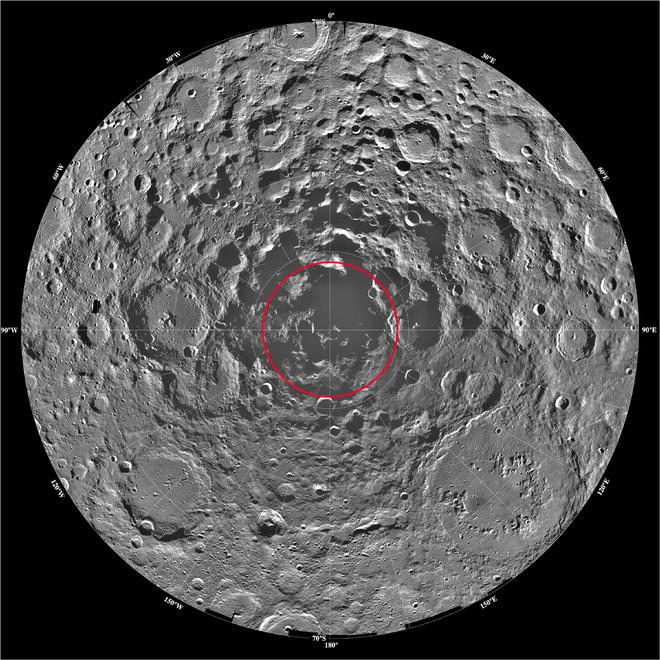
Chang'e-7預計將于2026年推出。其首選的著陸點位于 火山口附近。 特定的坐標為88.8°S,123.4°E,緯度高于86°S。 這是倫納南極地區,經度為800。該地區有許多連續的光面積和富含水冰資源的永久陰影區域。
紅色圓圈是具有晝夜和夜間現象的農歷南極,藍色盒子是Chang'e-7的首選著陸區。
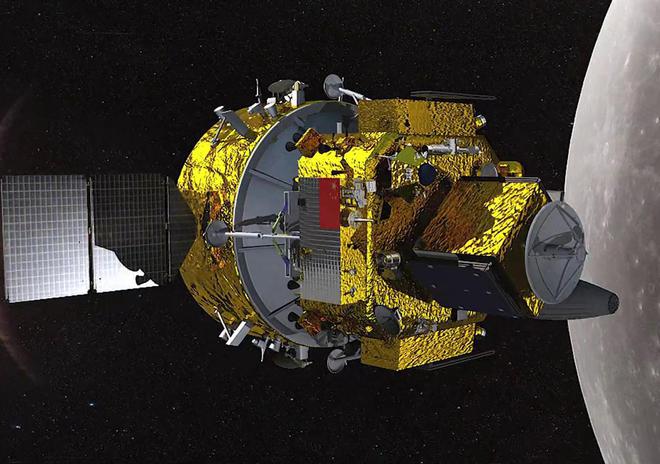
Chang'e-7是一種大規模的多車輛探針,由推進模塊,登陸器,月球漫游器和Flyby探針組成。
著陸器將月球漫游器和Flyby探測器一起帶到月球。 為了降落在農歷南極的復雜地形上,同時探索了隨后在月球表面上的多個月球表面科學研究站的集中部署的道路,將在Chang'e-7 上部署Chang'e-3,Chang'e-4,基于第5號的高可靠性和高安全性月球著陸技術,它進一步征服了月球表面上的定點著陸技術在瞄準范圍內著陸的能力。

固定點著陸技術
有兩種技術來實現定點降落的方法。 一個基于上圖中顯示的無線電標準導航,另一個基于地形相對導航技術。 當Chang'7降落在月球南極時,月球上沒有無線電信標。 因此,可以推測它將使用地形等效導航技術在月球表面取得突破。 這兩種技術都需要建造月球科學研究站,我們將擁有它們。
預計月球漫游者將被命名為Yutu 3. Flyby探測器可以被視為可反復起飛并登陸的可飛行和移動著陸器。 它可以從月球起飛并直接飛入永久的陰影區域,以檢測原位水冰并獲得水冰。 直接證據證明存在或缺乏資源。

Chang'e-7的Flyby探測器
Chang'e-7有許多亮點。 您可以通過查看其每種工具所攜帶的科學有效載荷來感受到其強大的能力:
推進模塊:高分辨率立體相機,月球微波成像雷達,寬頻段紅外光譜成像分析儀,月球中子伽瑪光譜儀,月球磁力計
:月球土壤揮發物測量工具,月球表面環境檢測系統,極端紫外線攝像頭,月球地震儀表
YUTU-3 LUNAR ROVER:拉曼光譜儀,月球雷達,月球表面磁場測量儀器
:月球土水分子分析儀
還有特殊的功能載荷,例如“月球土壤穿透測量師”。
由于空間的限制,我們僅以推進模塊攜帶的高分辨率立體聲攝像頭為例。 根據競爭性載荷功能指數要求,有效載荷需要分辨率為0.5米,以在100公里的高度下對月面的全彩成像,并且成像寬度為0.5米。 寬度必須大于或等于18公里,這意味著,在與NASA的LRO LUNAR軌道軌道調查車的狹窄野外攝像頭相同的成像分辨率下,我們的成像寬度將是其三倍以上,這意味著我們將是我們的成像寬度在較短的時期內獲得更高的月球表面的高分辨率成像數據。 您應該知道,這些只是競爭指數要求,而實際的獲勝負載能力肯定會更好。
Chang'e-7推進模塊將配備世界領先的月球高分辨率相機
如果-1火星探測器是月球勘探項目的三步軌道返回技術的轉變,那么Chang'e-7將在我國的月球勘探中,是新一代的國家重要性,并且將進行后續的chang'e-8探測器降落在不同位置。 基于這一點,我們還將建立一個由我國領導的國際月球科學研究站。 毫無疑問,我們進入了世界航空業的第一個梯隊,并將在不久的將來完全有能力。 它的功能位于世界航空梯隊的最前沿。
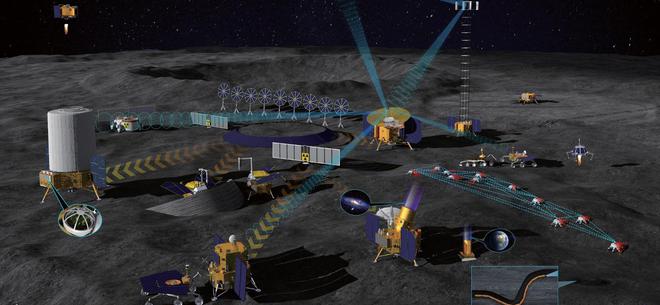
由我國領導的國際月球研究站的渲染
沒有人能隨隨便便就成功。 我國的月球勘探項目也逐步進行。 在Chang'e-1任務的早期,檢測器的定位率僅略高于80%。 我們真誠地希望俄羅斯的“月亮25”數字檢測器能成功。 畢竟,他們也是我們國際月球科學研究站的重要成員。 只要他們能夠遵守可持續發展的戰略并奠定了良好的基礎,我相信有一天他們也可以有一天像我們一樣進入月球自由王國。 領域。