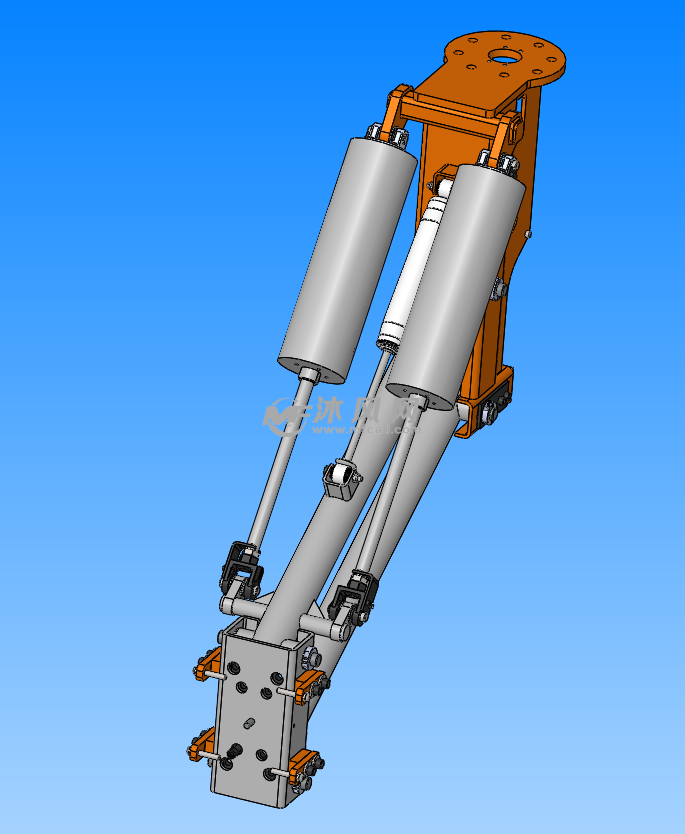
項目編號:項目立項申請書硬臂搬運推動機械手的設計開發項目名稱:硬臂搬運推動機械手的設計開發項目負責人:項目起止時間:********設備有限公司2016年8月制**********設備有限公司一、項目立項目的和背景硬臂氣動推動機械手是一種模擬人手進行相關運動和操作的手動化機械。硬臂氣動推動機械手的主要用途是:在車間中用于重物的搬運,進而提升鞋廠的生產效率。硬臂氣動推動機械手可以根據人為編撰的程序來進行抓取、搬運物件或則幫襯工具完成個別特定操作。硬臂氣動推動機械手可以取代人類從事單調化、重復化或繁雜的體力勞動機械助力臂設計,進而實現丄業生產中機械化和手動化的快速發展。碩臂氣動推動機械手可以取代人類在有害環境下的手工操作,因而改善工人的勞動條件機械助力臂設計,保證工人的人身安全。為此,硬臂氣動推動機械手在機械制造、冶金、電子、輕工和原子能源等相關領域得到了廣泛的應用。本項LI對硬臂氣動推動機械手的運動軌跡、動作順丿了:、坐標方式、自山度、驅動機構、執行機構進行了深入研究,可實現機械手和錐面的精確定位,物料的精確位移操作。二、項目采用的技術方式1、本項目設計的硬臂氣動推動機械手主要曲4個執行機構及其相應的4個汽缸組成:手部執行機構釆用一個直線氣壓缸來實現手抓的伸開與閉合,手抓的張合角為40°;腕部執行機構釆用一個擺動汽缸實現手部機構回轉270°;臂部執行機構采用直線氣壓缸來實現肘部提高與增長;機身采用一個擺動汽缸來實現肘部回轉270°o2、項目采用氣動機構驅動硬臂推動機械手,具有清潔環保、控制便捷、結構簡單、尺寸緊湊、重量輕等優點。
3、采用PLC程序控制系統執行邏輯運算、順序控制、定時、計數與算術操作等面向用戶的指令,并通過數字或模擬式輸入/輸出控制碩臂氣動推動機械手的運動軌跡和動作操作。三、項目創新點1、采用重型材料鋁合金材料,盡可能降低腿部運動件的重量,進而降低慣性,實現臂部運動速率的高要求的標準。2、采用滾動磨擦來取代滑動磨擦,降低了硬臂氣動推動機械手的手指運動之間山磨擦形成的阻力,提升硬臂氣動推動機械手的手指動作靈活度。四、項目經費投入預算序號項L1經費用途1原材料費3.5原材料的訂購及燃料動力費用2專用業務費0.5實驗、檢測、專利申請、學術交流等3人員費用3項目人員薪資及績效獎勵4市場推廣費0.5市場推廣費用合計7.5/五.項目預計經濟效益本項LI將會設計一套硬臂氣動推動機械手,可廣泛應用于機械制造、冶金、電子、輕工和原子能源等領域,具備精度高,抓取療效好、靈活度高等性能,具備良好的實用意義,可為公司帶來良好的經濟效益。六.項目審批技術部意見總總監意見項目初驗報告項目名稱:硬臂搬運推動機械手的設計開發項目起止日期:項目負責人:研制部意見財務部意見總總監意見