1. 彈簧雙振動器型號
彈簧雙振動器不在高考要求大綱中,但基礎好的同學還是需要掌握的。 首先,此類問題很容易出現(xiàn)在重點大學的基礎物理專業(yè)中。 其次,彈簧雙振子模型的解題思路沒有超出高考大綱。 涉及到質心位置、變換參考系、簡諧振動等知識點的綜合。 ,只有掌握了這些,高中物理的動力體系才算比較完整。 事實上,高中數(shù)學物理的教學大綱并不系統(tǒng)。 目標要求較高的考生必須妥善掌握高考以外的考試點,使數(shù)學物理知識體系完整。 這對于解決高考題也會有幫助。
讓我們看一個示例問題:
話題:
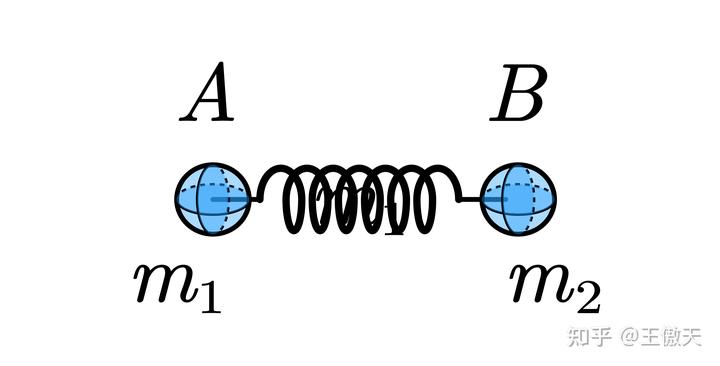
如圖所示,輕質彈簧的長度為L,剛度系數(shù)為k。 彈簧兩端固定有兩個小球A、B,質量分別為m_{1}、m_{2}。 球可以被視為質點。 以球A的初始位置為坐標原點,向右建立水平坐標系。 在初始時刻,球和彈簧保持靜止。 現(xiàn)在給質量為 m_{1} 的球 A 一個水平向右的初速度 v_{0},并嘗試求任意時刻兩個球的位置坐標和相對距離 d(t)(忽略所有摩擦力)。
回答:
初始時刻的質心位置為:
x_{text{質心}}(0)=frac{m_{2}L}{m_{1}+m_{2}} \
易知,質心以速度u保持勻速直線運動,且速度u滿足:
(m_{1}+m_{2})u=m_{1}v_{0} \
則質心位置坐標隨時間變化的表達式為:
begin{} x_{text{質心}}(t)&=ut+x_{text{質心}}(0)\ &=frac{m_{1}v_{0}} {m_{1 }+m_{2}}t+frac{m_{2}L}{m_{1}+m_{2}}\ end{} \
以質心為參考系,球A、B分別做簡諧振動。 彈簧整體可以看作是兩個彈簧的串聯(lián)。 球A到質心的彈簧剛度系數(shù)k_{1}和球B到質心的彈簧剛度系數(shù)k_{2}分別滿足:
k_{1}x_{text{質心}}(0)=k_{2}(L-x_{text{質心}}(0))=kL \
不難理解:
begin{} k_{1}&=frac{k(m_{1}+m_{2})}{m_{2}}\ k_{2}&=frac{k(m_{1}+ m_{2})}{m_{1}} end{} \
因此,不難得出高中物理彈簧,球A相對于質心做簡諧振動的角速度{1},球B相對于質心做簡諧振動的角速度{2}分別滿足:
begin{} {1}&=sqrt{frac{k_{1}}{m_{1}}}=sqrt{frac{k(m_{1}+m_{2})}{m_ {1}m_{2}}}\ {2}&=sqrt{frac{k_{2}}{m_{2}}}=sqrt{frac{k(m_{1}+m_ {2})}{m_{1}m_{2}}}\ end{} \
因此,小球A相對于質心的簡諧振動的振幅A_{1}和小球B相對于質心的簡諧振動的振幅A_{2}分別滿足:
begin{} A_{1}&=frac{v_{0}-u}{{1}}=frac{m_{2}v_{0}}{m_{1}+m_{2}} sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}\ A_{2}&=frac{u}{{2}}= frac{m_{1}v_{0}}{m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2} )}}\ 結尾{} \
因此,如果以質心為參考系,小球A和小球B相對于質心做簡諧振動,相對于質心的位置坐標為x_{1}^{ prime}(t) 和 x_{2}^{ prime}(t) (以任意時刻的質心為坐標原點,水平向右為正方向)分別滿足:
begin{} x_{1}^{prime}(t)&=-(x_{text{質心}}(0)-A_{1}sin{1}t)\ &= frac {m_{2}v_{0}}{m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2} )} }sinsqrt{frac{k(m_{1}+m_{2})}{m_{1}m_{2}}}t-frac{m_{2}L}{m_{1 }+ m_{2}}\ x_{2}^{prime}(t)&=(L-x_{text{質心}}(0)-A_{2}sin{2} t)\ &=frac{m_{1}L}{m_{1}+m_{2}}-frac{m_{1}v_{0}}{m_{1}+m_{2}} sqrt{ frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{frac{k(m_{1}+m_{2}) }{m_{ 1}m_{2}}}t\ end{} \
因此,球A和B相對于地面的位置坐標x_{1}(t)和x_{2}(t)分別滿足:

begin{} x_{1}(t)&=x_{1}^{prime}(t)+ut+x_{text{質心}}(0)\ &=frac{m_{ 2} v_{0}}{m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sin sqrt {frac{k(m_{1}+m_{2})}{m_{1}m_{2}}}t+frac{m_{1}v_{0}}{m_{1}+m_ {2 }}t\ x_{2}(t)&=x_{2}^{prime}(t)+ut+x_{text{質心}}(0)\ &=-壓裂{m_{1}v_{0}}{m_{1}+m_{2}}sqrt{壓裂{m_{1}m_{2}}{k(m_{1}+m_{2}) }}sin sqrt{frac{k(m_{1}+m_{2})}{m_{1}m_{2}}}t+L+frac{m_{1}v_{0}}{ m_{1} +m_{2}}t\ end{} \
任意時刻A球與B球之間的距離d滿足:
begin{} d(t)&=x_{2}(t)-x_{1}(t)\ &=x_{2}^{prime}(t)-x_{1}^{prime }(t)\ &=L-v_{0}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{壓裂{k(m_{1}+m_{2})}{m_{1}m_{2}}}t end{} \
有一種更簡單的方法可以求解球 A 和 B 相對于地面的位置坐標 x_{1}(t) 和 x_{2}(t)。 假設還有另一個輕質彈簧高中物理彈簧,其質心位置和運動速度與問題中的彈簧一致。 不同的是,假想的彈簧沒有變形。 假設假想彈簧左端的位置坐標為P_{1}(t),右端的位置坐標為P_{2}(t)。 那么小球A相對于P_{1}(t)的位置坐標為x^{prime prime}_{1}(t)為:
begin{} x^{primeprime}_{1}(t)&=A_{1}sin{1}t\ &=frac{m_{2}v_{0}}{m_ {1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{frac{k(m_ {1}+m_{2})}{m_{1}m_{2}}}t\ end{} \
同理,球B相對于P_{2}(t)的位置坐標x^{primeprime}_{2}(t)為:
begin{} x^{primeprime}_{2}(t)&=-A_{2}sin{2}t\ &=-frac{m_{1}v_{0}} {m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{frac{k (m_{1}+m_{2})}{m_{1}m_{2}}}t\ end{} \
不難發(fā)現(xiàn),P_{1}(t)和P_{2}(t)的位置坐標滿足:
begin{} P_{1}(t)&=ut\ &=frac{m_{1}v_{0}}{m_{1}+m_{2}}t\ P_{2}(t )&=ut+L\ &=frac{m_{1}v_{0}}{m_{1}+m_{2}}t+L\ end{} \
因此,容易發(fā)現(xiàn)球A和球B相對于地面的位置坐標滿足:
begin{} x_{1}(t)&=x^{primeprime}_{1}(t)+P_{1}(t)\ &=frac{m_{2}v_{0 }}{m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{frac {k(m_{1}+m_{2})}{m_{1}m_{2}}}t+frac{m_{1}v_{0}}{m_{1}+m_{2}}t \ x_{2}(t)&=x^{primeprime}_{2}(t)+P_{2}(t)\ &=-frac{m_{1}v_{0} {m_{1}+m_{2}}sqrt{frac{m_{1}m_{2}}{k(m_{1}+m_{2})}}sinsqrt{frac{ k(m_{1}+m_{2})}{m_{1}m_{2}}}t+frac{m_{1}v_{0}}{m_{1}+m_{2}}t+ L \ 結尾{} \