學(xué)長(zhǎng)們,我會(huì)利用一些空閑時(shí)間來(lái)分析一下我們南京工業(yè)大學(xué)機(jī)械考研的重點(diǎn)和難點(diǎn)。 我希望它能幫助你。
1.復(fù)習(xí)參考書(shū)
1.機(jī)械原理與機(jī)械設(shè)計(jì)(第一卷)(第二版)。 范元?jiǎng)住埱嗑帲迦A大學(xué)出版社,2020.9
2.機(jī)械原理(第八版)。 孫歡、陳作模、葛文杰主編,高等教育出版社。

2.復(fù)習(xí)要點(diǎn)第一章簡(jiǎn)介(未測(cè)試)
1.機(jī)械原理、機(jī)械、機(jī)器、機(jī)構(gòu)的研究對(duì)象
2.機(jī)械原理課程內(nèi)容
三、機(jī)械原理課程的地位和作用
第二章 平面機(jī)械結(jié)構(gòu)分析(難度:2星)
一、研究組織結(jié)構(gòu)分析的目的
2.平面運(yùn)動(dòng)副及其分類(lèi)
3.平面機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖
4.平面機(jī)構(gòu)的自由度
焦點(diǎn):平面機(jī)構(gòu)自由度的計(jì)算
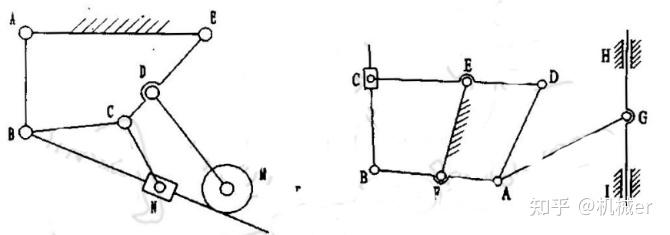
真題舉例: 1.計(jì)算下列機(jī)構(gòu)的自由度。 如有復(fù)合鉸鏈、局部自由度、虛約束等,應(yīng)明確指出; 并表明該機(jī)構(gòu)具有確定的運(yùn)動(dòng)條件。 (2005年真題第一題)
第三章 平面機(jī)構(gòu)運(yùn)動(dòng)分析(難度:3星)
一、制度運(yùn)動(dòng)分析的研究目的和方法
2.速度瞬時(shí)中心法及其在機(jī)構(gòu)速度分析中的應(yīng)用
3.采用相對(duì)運(yùn)動(dòng)圖法(基點(diǎn)法、重合點(diǎn)法)分析機(jī)構(gòu)的運(yùn)動(dòng)
要點(diǎn):利用瞬時(shí)中心法和相對(duì)運(yùn)動(dòng)圖法(擴(kuò)展分量法)進(jìn)行機(jī)構(gòu)運(yùn)動(dòng)分析
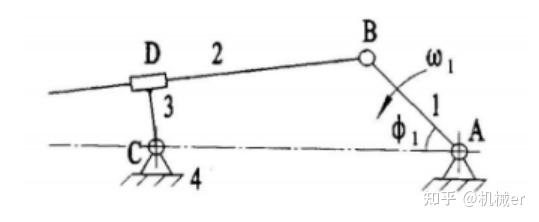
真題類(lèi)型:2、如圖所示機(jī)構(gòu)中斜面機(jī)械效率特點(diǎn),已知lAB=30mm,lAC=70mm,lCD=15mm,勻速角速度ω1=10rad/s,轉(zhuǎn)向方向如圖所示,Φ1=45°。
1、取μ1=1mm/mm,畫(huà)出機(jī)構(gòu)的簡(jiǎn)單運(yùn)動(dòng)圖;
2.用相對(duì)運(yùn)動(dòng)圖法求構(gòu)件3的角速度ω3和角加速度ε3。(20分)(2005年第2題)
第四章 平面連桿機(jī)構(gòu)及其設(shè)計(jì)(難度:三顆半)
1.平面連桿機(jī)構(gòu)的應(yīng)用及其設(shè)計(jì)中的基本問(wèn)題
2.平面四桿機(jī)構(gòu)的基本形式及演化
3、平面四桿機(jī)構(gòu)主要工作特性:行程速度變化系數(shù)、壓力角、傳動(dòng)角、死點(diǎn)
4、曲柄存在的條件
5.平面四桿機(jī)構(gòu)圖形化設(shè)計(jì)
重點(diǎn):平面四桿機(jī)構(gòu)的類(lèi)型和工作特性(壓力角、傳動(dòng)角、行程速度變化系數(shù))、曲柄存在條件、平面連桿機(jī)構(gòu)圖形設(shè)計(jì)。
真題型:3、如圖所示連桿機(jī)構(gòu)中,已知lAB=15mm,lBC=45mm斜面機(jī)械效率特點(diǎn),lCD=35mm,lAD=40mm,lCE=40mm,e=15mm,構(gòu)件1為原動(dòng)件部分。
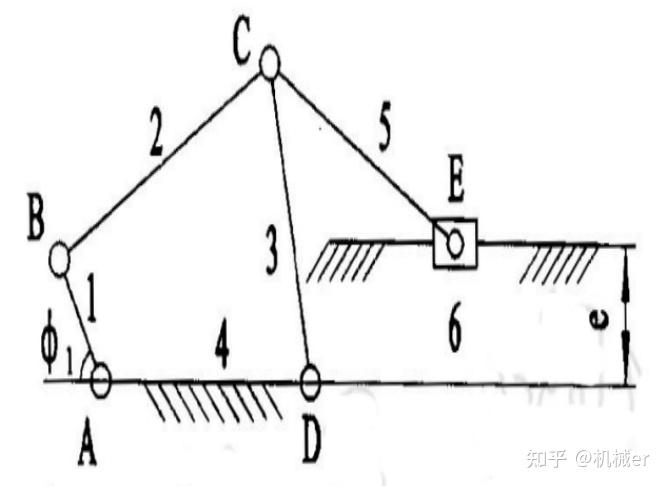
1、畫(huà)出Φ1=60°時(shí)機(jī)構(gòu)的運(yùn)動(dòng)示意圖,并標(biāo)出曲柄搖桿機(jī)構(gòu)ABCD的極角θ和滑塊的行程H。
2、如果要求滑塊6從左向右快速移動(dòng),試確定曲柄1的轉(zhuǎn)向方向(20分)。 (2005年問(wèn)題3)
第五章 凸輪機(jī)構(gòu)及其設(shè)計(jì)(難度:三顆星)
1.凸輪機(jī)構(gòu)的應(yīng)用及分類(lèi)
2.被驅(qū)動(dòng)部件的常見(jiàn)運(yùn)動(dòng)規(guī)律及運(yùn)動(dòng)特性
3.根據(jù)給定的運(yùn)動(dòng)規(guī)律——圖解法設(shè)計(jì)凸輪輪廓
4.凸輪機(jī)構(gòu)基本尺寸的確定、壓力角與基圓半徑的關(guān)系、滾子半徑的選擇
要點(diǎn):反演法設(shè)計(jì)凸輪輪廓的原理及應(yīng)用、凸輪機(jī)構(gòu)的運(yùn)動(dòng)特性、從動(dòng)件的運(yùn)動(dòng)規(guī)律與凸輪參數(shù)(壓力角、基蝸桿圓半徑、滾子半徑)的關(guān)系
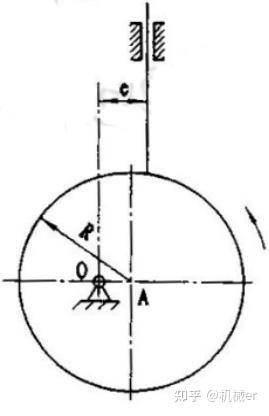
真題舉例: 4、凸輪機(jī)構(gòu)如圖所示。 凸輪為偏心輪,轉(zhuǎn)向如圖所示。 已知:R=32mm,lOA=10mm,e=15mm,試在圖上標(biāo)出:(20分) (1)凸輪基圓半徑ro; (2)圖中所示位置處從動(dòng)件的壓力角ɑ; (3)在從動(dòng)件最大行程時(shí),用反轉(zhuǎn)法確定從動(dòng)件與凸輪的相對(duì)位置,并在圖上標(biāo)出最大位移Smax。
4、凸輪機(jī)構(gòu)如圖所示。 凸輪為偏心輪,轉(zhuǎn)向如圖所示。 已知:R=32mm,lOA=10mm,e=15mm,試在圖上標(biāo)出:(20分) (1)凸輪基圓半徑ro; (2)圖中所示位置處從動(dòng)件的壓力角ɑ; (3)在從動(dòng)件最大行程時(shí),用反轉(zhuǎn)法確定從動(dòng)件與凸輪的相對(duì)位置,并在圖上標(biāo)出最大位移Smax。
第六章齒輪機(jī)構(gòu)及其設(shè)計(jì)(難度:三顆星)
一、齒輪機(jī)構(gòu)的應(yīng)用及分類(lèi)
2.平面齒輪機(jī)構(gòu)齒形嚙合的基本規(guī)律
3.漸開(kāi)線及其性質(zhì)
4.漸開(kāi)線齒形的嚙合及特點(diǎn)
5.漸開(kāi)線標(biāo)準(zhǔn)正齒輪基本參數(shù)及幾何尺寸
6.漸開(kāi)線直齒輪傳動(dòng)、齒輪安裝的嚙合過(guò)程及正確的嚙合條件
7.漸開(kāi)線齒輪傳動(dòng)的重合度
8.漸開(kāi)線齒輪傳動(dòng)的無(wú)齒隙嚙合
9.漸開(kāi)線齒形切削原理
10.漸開(kāi)線齒廓的根切、標(biāo)準(zhǔn)齒輪不根切的條件、齒輪位移
11.變速齒輪傳動(dòng)、無(wú)齒隙嚙合方程、位移齒輪傳動(dòng)參數(shù)計(jì)算
12.平行軸斜齒圓柱齒輪
13.蝸輪傳動(dòng)
14.錐齒輪機(jī)構(gòu)
要點(diǎn):傳動(dòng)原理、直齒、斜齒圓柱齒輪的特點(diǎn)及傳動(dòng)參數(shù)計(jì)算、重合度計(jì)算、變位齒輪原理及參數(shù)計(jì)算
真題舉例: 5、一對(duì)正嚙合的漸開(kāi)線標(biāo)準(zhǔn)外嚙合正齒輪機(jī)構(gòu),齒數(shù)z1=30,傳動(dòng)比i12=2.5,壓力角ɑ=20°,模數(shù)m =10mm,試求下列量的值:(1)齒輪2的節(jié)圓、基圓和齒根圓半徑r2、rb2、rf2; (2)齒厚s、基節(jié)距pb和標(biāo)準(zhǔn)中心距a; (3) 當(dāng)安裝中心距a'比標(biāo)準(zhǔn)中心距a大2mm時(shí),嚙合角a'和節(jié)圓半徑r1'、r2'。 (20分)
第七章齒輪系統(tǒng)及其設(shè)計(jì)(難度:2星)
1.齒輪系及其分類(lèi)
2.定軸輪系傳動(dòng)比計(jì)算及應(yīng)用
3.行星輪系傳動(dòng)比計(jì)算及應(yīng)用
4.復(fù)合輪系的傳動(dòng)比及應(yīng)用
焦點(diǎn):行星齒輪系和復(fù)合齒輪系的傳動(dòng)比計(jì)算
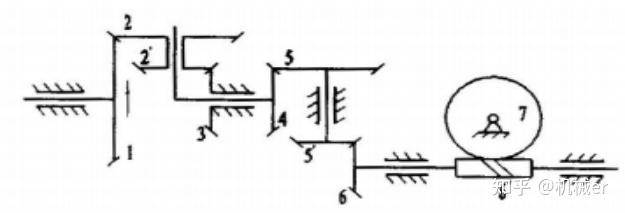
真題類(lèi)型:如圖所示的齒輪系中,已知每個(gè)輪的齒數(shù)為z1=60,z2=40,z2'=z3=20,z4=20,z5=40,z5' =z6,z7=60,蝸桿為z6'=1,旋轉(zhuǎn)方向如圖所示。 若輪1按圖中所示方向轉(zhuǎn)動(dòng),求出i17的尺寸,并在圖中標(biāo)出蝸輪7的轉(zhuǎn)動(dòng)方向。 (20分)
第八章 其他常用機(jī)構(gòu)(少量測(cè)試)(難度:一星)
1、萬(wàn)向聯(lián)軸器機(jī)構(gòu)和螺桿機(jī)構(gòu)
2.間歇運(yùn)動(dòng)機(jī)構(gòu)
3.非圓齒輪機(jī)構(gòu)
聚焦:常用間歇運(yùn)動(dòng)機(jī)構(gòu)及其特點(diǎn)
第九章 平面機(jī)構(gòu)受力分析(難度:3星半)
1.運(yùn)動(dòng)副摩擦力和反作用力的測(cè)定
2.平面機(jī)構(gòu)動(dòng)靜力分析
3.速度多邊形杠桿法
4、機(jī)構(gòu)的機(jī)械效率和自鎖性
重點(diǎn):考慮摩擦的運(yùn)動(dòng)副反作用力的確定、機(jī)構(gòu)的動(dòng)靜力分析方法、機(jī)械效率的分析計(jì)算。
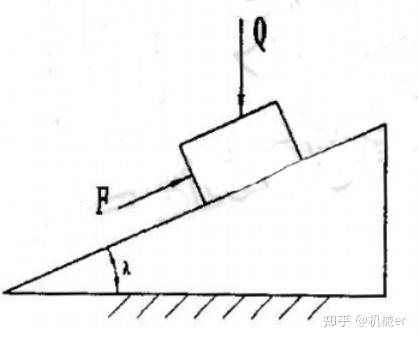
真題類(lèi)型: 7.如圖所示為斜面機(jī)構(gòu)。 滑塊在垂直力Q(包括重力)和平行斜面力F的作用下作勻速運(yùn)動(dòng)。 滑塊與斜面之間的摩擦系數(shù)為f。 試推導(dǎo): (1)滑塊 滑塊勻速上升時(shí)機(jī)構(gòu)的效率; (2)滑塊勻速下降時(shí)機(jī)構(gòu)的效率和自鎖條件。 (15分)(2005年真題)
第10章機(jī)械系統(tǒng)動(dòng)力學(xué)(難度:2星)
1.作用于機(jī)械的驅(qū)動(dòng)力和阻力的類(lèi)型
2.單自由度機(jī)械等效動(dòng)力學(xué)模型
3.運(yùn)動(dòng)類(lèi)型的機(jī)器方程及其解
4、機(jī)械速度波動(dòng)及其調(diào)整
5.機(jī)械運(yùn)轉(zhuǎn)平均速度及不均勻系數(shù)、飛輪設(shè)計(jì)
研究方向:?jiǎn)巫杂啥葯C(jī)械等效動(dòng)力學(xué)模型及等效參數(shù)計(jì)算、機(jī)械周期運(yùn)動(dòng)速度波動(dòng)的調(diào)節(jié)方法
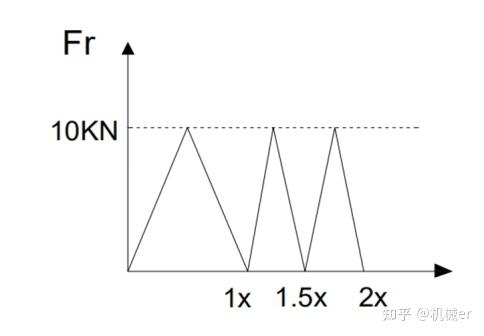
真題類(lèi)型:機(jī)器一個(gè)運(yùn)行周期內(nèi)的Fr如圖所示。 圖中的三角形都是等腰三角形。 已知有效質(zhì)量Mb=10kg,Lab=100mm,部件1的平均轉(zhuǎn)速Wm=25rad/s,δ=0.05,飛輪安裝在構(gòu)件11上,飛輪的轉(zhuǎn)動(dòng)慣量最小2.求最大角速度和最小角速度(2019真題)
第十一章 平面機(jī)構(gòu)的平衡(難度:2星)
1.平衡目的和分類(lèi)
2.剛性旋轉(zhuǎn)部件的平衡:靜、動(dòng)平衡的條件和方法
3、平面機(jī)構(gòu)的平衡
焦點(diǎn):剛性轉(zhuǎn)子平衡計(jì)算
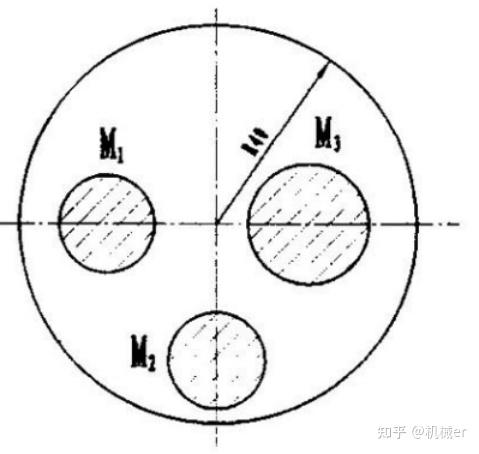
真題類(lèi)型:圖中為圓盤(pán)形旋轉(zhuǎn)零件,圓盤(pán)半徑R=40mm。 質(zhì)量分布在三個(gè)質(zhì)量塊上。 質(zhì)量為M1=100g,M2=140g,M3=160g。 M1和M3的質(zhì)心位于水平軸上。 ,M2的質(zhì)心在縱軸上,質(zhì)量塊質(zhì)心的矢量直徑為r1=50mm,r2=100mm,r3=75mm。 試求出需要添加的平衡質(zhì)量Mb的質(zhì)量和位置rb。 (2006年真題)

歡迎22名同學(xué)加入我們,共同探討專(zhuān)業(yè)課程的學(xué)習(xí)