1. 了解傳感器
1. 傳感器
(1)定義:傳感器是指能夠感知力、溫度、光、聲音、化學(xué)成分等物理量傳感器的原理,并能根據(jù)需要將其轉(zhuǎn)換成另一種易于傳輸和處理的物理量的元件。按照一定的規(guī)則(通常是電壓、電流等電量),或者轉(zhuǎn)換成電路的通斷。
生活中的例子

(2)基本特點(diǎn):將非電量轉(zhuǎn)換為易于測量、傳輸、處理和控制的電量。
2、傳感器的工作原理:傳感器通過敏感元件感知的通常是非電量,而利用轉(zhuǎn)換元件輸出的通常是電量,如電壓、電流、電荷等。
傳感器一般由敏感元件、轉(zhuǎn)換元件、轉(zhuǎn)換電路和輔助電源四部分組成。 其工作原理如圖所示。
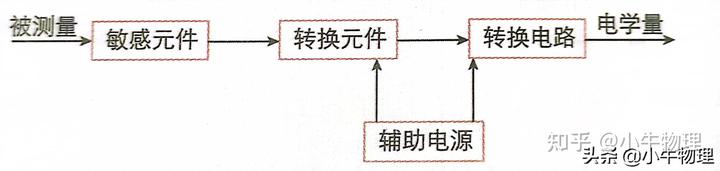
敏感元件直接感知被測量,輸出與被測量有確定關(guān)系的物理量信號; 轉(zhuǎn)換元件將敏感元件輸出的物理量信號轉(zhuǎn)換為電信號; 轉(zhuǎn)換電路負(fù)責(zé)對轉(zhuǎn)換元件輸出的電信號進(jìn)行放大和調(diào)制; 轉(zhuǎn)換元件和轉(zhuǎn)換電路一般還需要輔助電源。
?靈敏原干簧管的結(jié)構(gòu)及原理
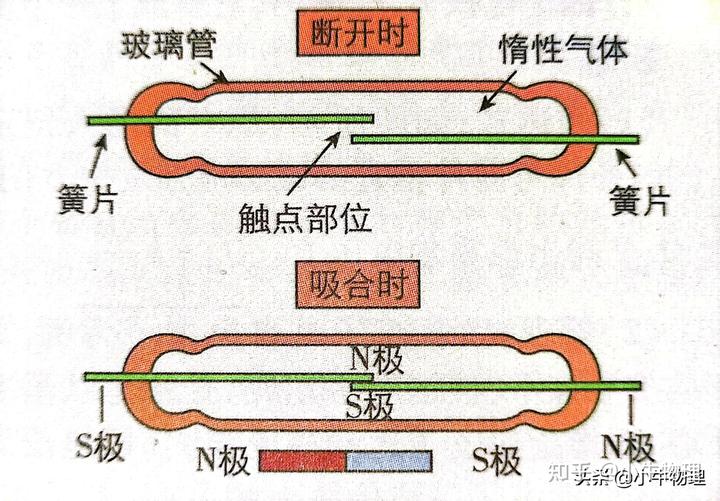
如圖所示,它由密封在玻璃管內(nèi)的兩片軟磁材料制成的簧片組成。 當(dāng)磁鐵靠近干簧管時(shí),兩個(gè)干簧管被磁化并相連,因此干簧管可以起到開關(guān)的作用。 操縱開關(guān)的是磁場這只看不見的“手”。 干簧管是一種可以感應(yīng)磁場的傳感器,廣泛應(yīng)用于電氣設(shè)備、電子設(shè)備中。
3、傳感器特點(diǎn)
小型化、數(shù)字化、智能化、多功能、系統(tǒng)化、網(wǎng)絡(luò)化是實(shí)現(xiàn)自動(dòng)檢測和自動(dòng)控制的首要環(huán)節(jié)。 傳感器的存在和發(fā)展賦予物體“觸覺”、“味覺”和“嗅覺”等感覺,使物體慢慢“活起來”。
4、傳感器的分類
(1)按用途可分為:壓力傳感器、位置傳感器、液位傳感器、能耗傳感器、速度傳感器、加速度傳感器、輻射傳感器、熱傳感器、雷達(dá)傳感器等。
(2)按其原理可分為:振動(dòng)傳感器、濕度傳感器、磁傳感器、氣體傳感器、真空傳感器、生物傳感器等。
(3)按其輸出信號可分為: 模擬傳感器——將被測量的非電量轉(zhuǎn)換成模擬電信號;
數(shù)字傳感器——將被測非電量轉(zhuǎn)換成數(shù)字輸出信號(包括直接和間接轉(zhuǎn)換);
數(shù)字傳感器——將被測信號轉(zhuǎn)換為頻率信號或短周期信號(包括直接和間接轉(zhuǎn)換);
開關(guān)傳感器——當(dāng)測量信號達(dá)到一定閾值時(shí),傳感器相應(yīng)地輸出設(shè)定的低電平或高電平信號。
(4)按其測量目的可分為:物理傳感器、化學(xué)傳感器、生物傳感器。
多個(gè)傳感器中的敏感元件
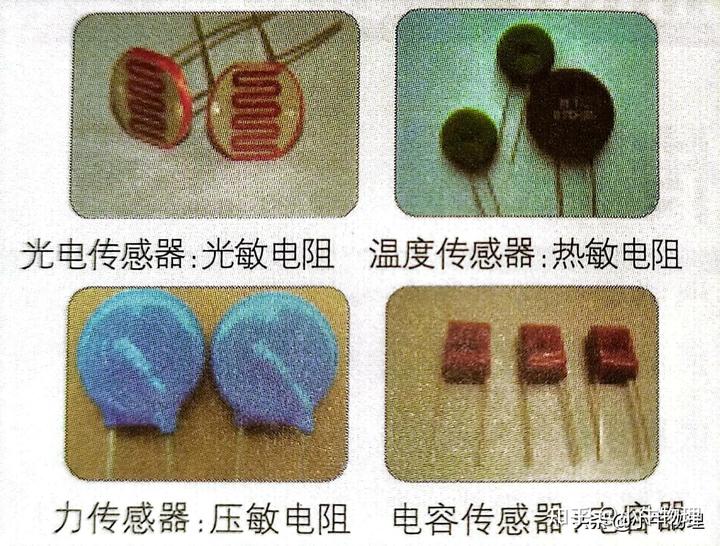
2. 敏感元件的了解
1、光敏電阻:是一種阻值隨入射光強(qiáng)弱而變化的電阻器。
(1)特點(diǎn):用不同的光照射光敏電阻時(shí),會(huì)得到不同的阻值。 從實(shí)驗(yàn)數(shù)據(jù)可以看出,一般光照強(qiáng)度越強(qiáng),電阻越小。
(2)本質(zhì):一般構(gòu)成光敏電阻的材料是半導(dǎo)體材料。 無光時(shí),載流子很少,導(dǎo)電性差。 隨著光照的增加,載流子增多,導(dǎo)電性變強(qiáng),電阻減小。 小的。
(3)作用:將光強(qiáng)度的光學(xué)量轉(zhuǎn)換成電阻的電量,就像人眼可以感知光的強(qiáng)度一樣。 光敏電阻可用來制作光電計(jì)數(shù)器。
?路燈、河流、海洋的信標(biāo)必須夜間開啟,白天關(guān)閉。 利用半導(dǎo)體的電學(xué)特性來制作自動(dòng)照明和熄滅裝置,實(shí)現(xiàn)自動(dòng)控制。 這是利用半導(dǎo)體的光敏性。
2.熱敏電阻和金屬熱電阻
(1)熱敏電阻
① 采用半導(dǎo)體材料制成的利用溫度變化來改變半導(dǎo)體導(dǎo)電性能的電子元件。 一般來說,熱敏電阻的阻值隨著溫度的升高而降低。
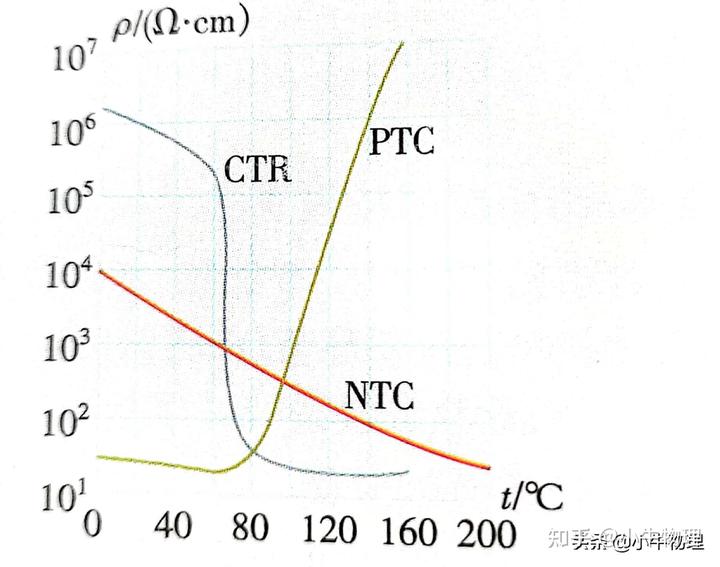
②分類:熱敏電阻是敏感元件的一種。 根據(jù)溫度系數(shù)不同,分為正溫度系數(shù)熱敏電阻(PTC)、負(fù)溫度系數(shù)熱敏電阻(NTC)和臨界溫度熱敏電阻(CTR)。 正溫度系數(shù)熱敏電阻阻值隨溫度升高而增大; 負(fù)溫度系數(shù)熱敏電阻的電阻隨著溫度的升高而減小(這是最常見的熱敏電阻,例如側(cè)邊欄 RT 圖像中的熱敏電阻); 臨界溫度熱敏電阻具有負(fù)阻突變特性。 在一定溫度下傳感器的原理,電阻值隨著溫度的升高而急劇下降,并具有較大的負(fù)溫度系數(shù)。 它們的電阻率隨溫度變化,如側(cè)邊圖中的 ρ-t 圖所示。 如圖所示。
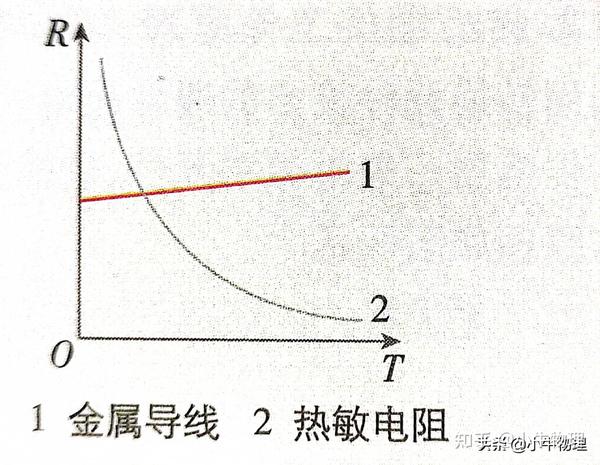
?金屬熱敏電阻、熱敏電阻的RT特性曲線
?各種熱敏電阻的電阻率如何隨溫度變化
(2)金屬熱電阻:金屬的電阻率隨溫度升高而增大。 利用這種特性,金屬線也可以制成熱傳感器,稱為熱電阻。 一般來說,金屬熱電阻的靈敏度較差。
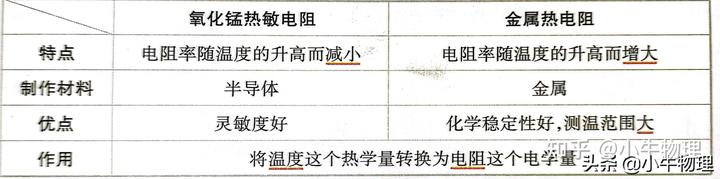
(3)氧化錳熱敏電阻與金屬熱電阻的比較
3.霍爾元件
1、霍爾元件:如圖所示,在一個(gè)小的矩形半導(dǎo)體(如砷化銦)片上制作四個(gè)電極E、F、M、N,就成為霍爾元件。
2. 霍爾電壓
(1)表達(dá)式:如圖所示,當(dāng)E和F之間通過恒定電流I,并施加垂直于板材的磁感應(yīng)強(qiáng)度為B的磁場時(shí),MN之間出現(xiàn)霍爾電壓UH,UH= kIB/天。
(2)原理:以載流子為自由電子為例,霍爾電壓推導(dǎo)如下: 根據(jù)左手定則,讓磁力線垂直穿過手掌,四個(gè)手指指向電子運(yùn)動(dòng)的相反方向(即電流方向)。
拇指指向電子受洛倫茲力的方向。 電子因洛倫茲力而偏轉(zhuǎn)并積聚在左右表面上。 然后左表面積累負(fù)電荷,右表面積累等量的正電荷。 即表面右側(cè)電位較高,會(huì)形成電場。 當(dāng)電子上的電場力與洛倫茲力平衡時(shí),左右兩側(cè)的電壓就會(huì)穩(wěn)定。
?霍爾元件的分類
霍爾元件可分為兩類:一類是金屬霍爾元件,其載流子是自由電子;另一類是金屬霍爾元件,其載流子是自由電子。 另一種是半導(dǎo)體霍爾元件,其載流子是空穴(可以認(rèn)為是帶正電的粒子)。
假設(shè)M、N左右板間距離為h,E、F上下板間距離為d,則eE場=eU/h=evB,又知導(dǎo)體中的電流I = nevS = nev·hd,聯(lián)立方程為U= IB/ned。 由于ne是由霍爾元件本身的材料決定的,所以我們稱kIB/d為霍爾系數(shù),用k表示,這樣UH=kIB/d,其中d為片材的厚度。
3. 霍爾電位水平的判斷
由左手定則確定帶電粒子受力的方向,得到帶電粒子的偏轉(zhuǎn)方向。 正電荷聚集的表面為高電位表面,負(fù)電荷聚集的表面為低電位表面。
?霍爾潛力判斷要點(diǎn)
在判斷霍爾電勢高低時(shí),一定要注意載流子是正電荷還是負(fù)電荷。 無論載流子是正電荷還是負(fù)電荷,四個(gè)手指指的是電流的方向,即正電荷定向運(yùn)動(dòng)的方向,與負(fù)電荷定向運(yùn)動(dòng)的相反方向(當(dāng)電流的方向是恒定的,無論載流子是正電荷還是負(fù)電荷,作用在載流子上的力的方向是相同的)。
4.霍爾元件的作用
霍爾元件的厚度d和霍爾系數(shù)k是固定值。 如果電流I保持恒定,則霍爾電壓U與磁感應(yīng)強(qiáng)度B成正比。因此,霍爾元件可以將磁感應(yīng)強(qiáng)度的磁量轉(zhuǎn)換成電壓,這是一個(gè)電量,因此霍爾元件也稱為磁傳感器。
?霍爾傳感器技術(shù)在汽車行業(yè)有著廣泛的應(yīng)用物理資源網(wǎng),包括動(dòng)力、車身控制、牽引力控制和防抱死制動(dòng)系統(tǒng)。 為了滿足不同系統(tǒng)的需求,霍爾傳感器有開關(guān)式、模擬式和數(shù)字式三種形式。