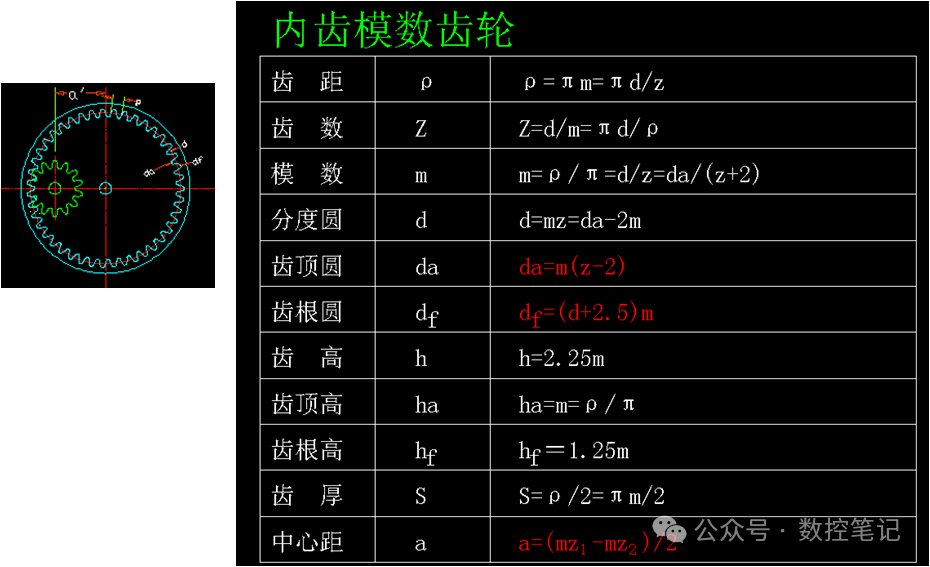
1. 內部模塊齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
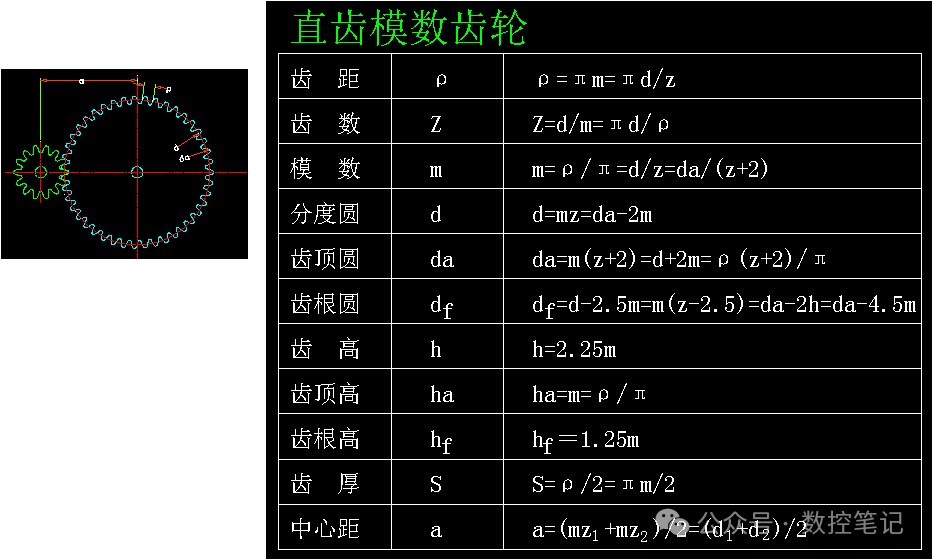
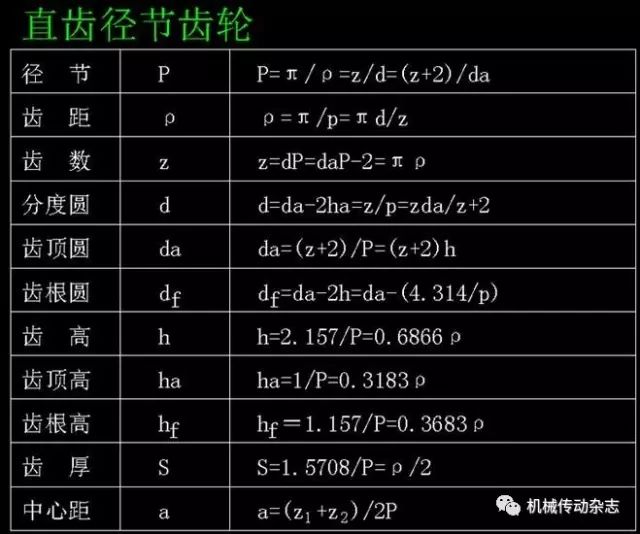
2. 直齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
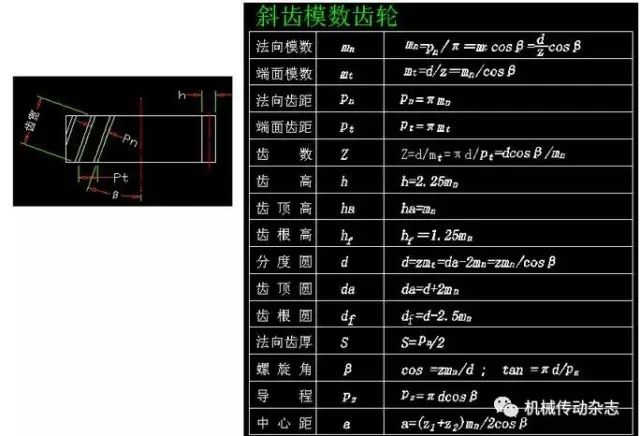
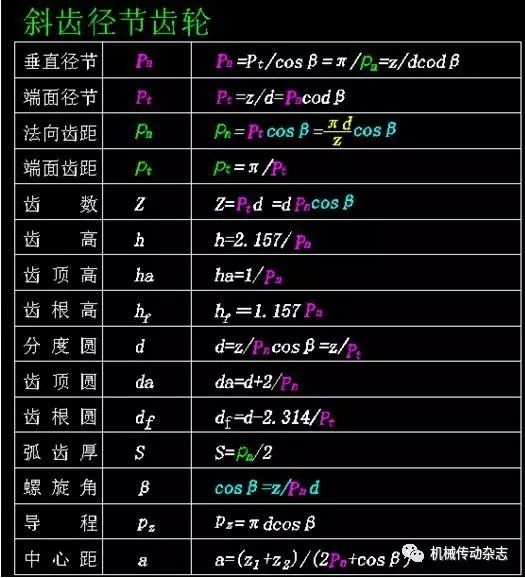
3.斜齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
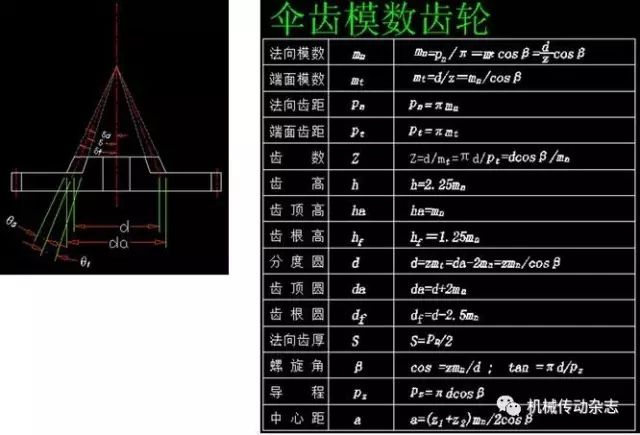
4. 錐齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
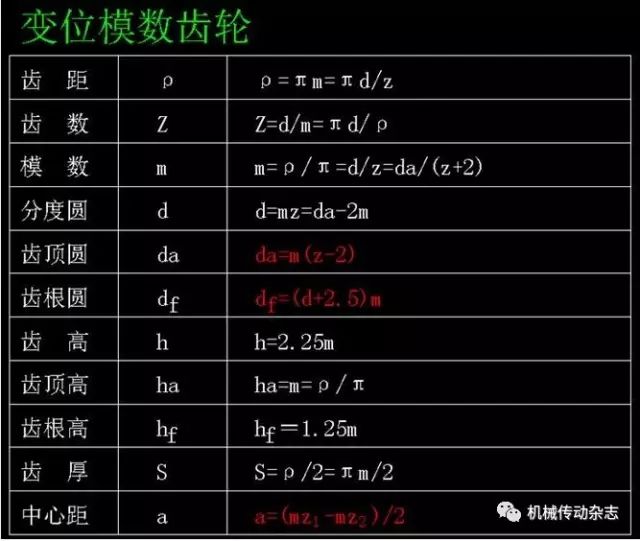
5. 模數齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
6. 正齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
7. 斜齒齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
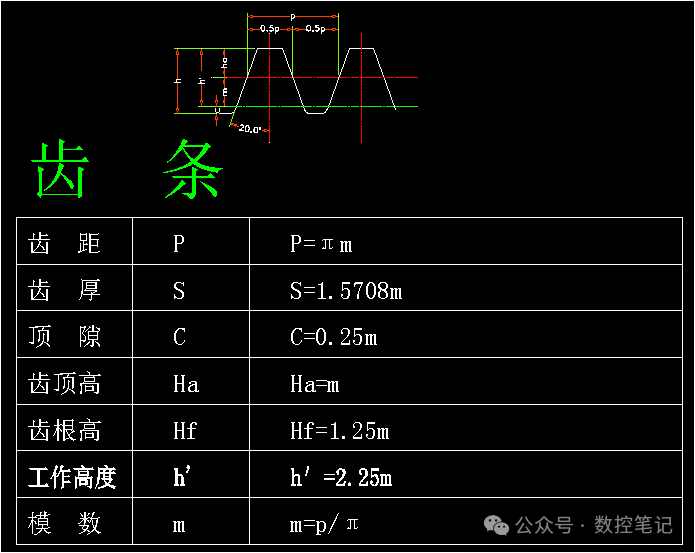
8. 機架9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
移動數控輔助軟件9GN物理好資源網(原物理ok網)
方便查詢和計算,歡迎下載!9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
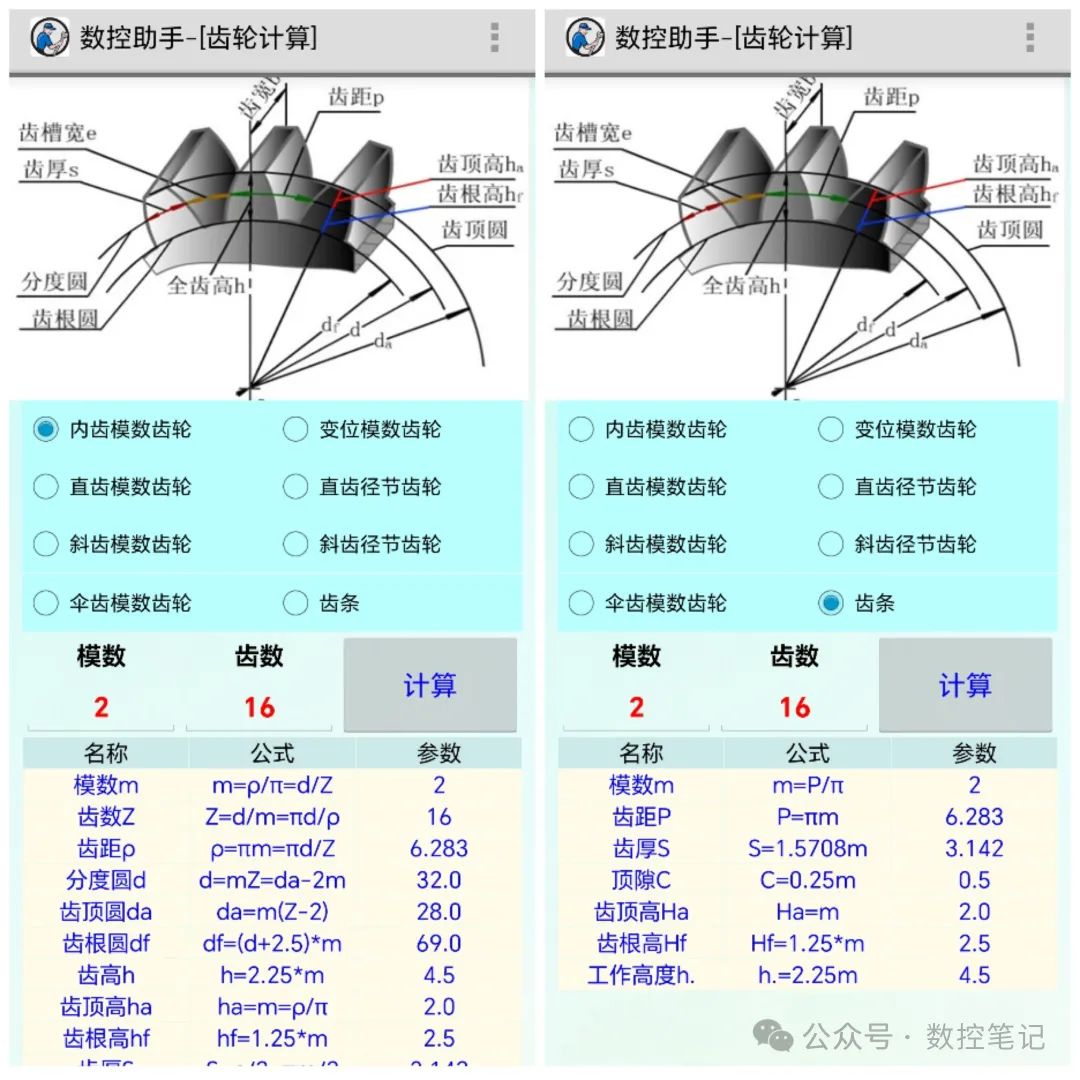
漸開線齒輪9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
計算公式:9GN物理好資源網(原物理ok網)
齒尖直徑 = (齒數 + 2) * 模數9GN物理好資源網(原物理ok網)
節圓直徑=齒數*模數9GN物理好資源網(原物理ok網)
齒根圓直徑 = 齒頂圓直徑 - 4.5 模數9GN物理好資源網(原物理ok網)
例如:M4 32齒9GN物理好資源網(原物理ok網)
尖端直徑 = (32 + 2) * 4 = 136 毫米9GN物理好資源網(原物理ok網)
節圓直徑=32*4=128mm9GN物理好資源網(原物理ok網)
齒根直徑=136-4.5*4=118mm9GN物理好資源網(原物理ok網)
模數 m = 節圓直徑 d / 齒數 z = 齒距 p / pi π9GN物理好資源網(原物理ok網)
模數是決定齒輪大小的因素,齒輪模數定義為模數齒輪齒數的基本參數,是人為抽象出來的一個數字,用來衡量齒輪齒數的大小,目的是為了標準化齒輪加工工具,降低成本。直齒輪、斜齒輪、錐齒輪的模數均可參考標準模數系列表。9GN物理好資源網(原物理ok網)
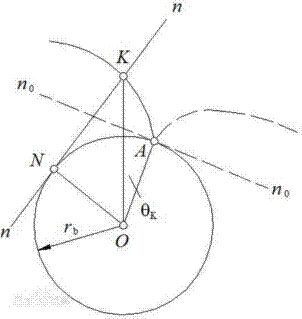
當直線單純沿圓滾動時,直線上任一點的運動軌跡稱為該圓的漸開線,該圓稱為漸開線的基圓,直線稱為母線。以漸開線為齒廓的齒輪稱為漸開線齒輪。漸開線齒輪能保持恒定的傳動比。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
AK:漸開線9GN物理好資源網(原物理ok網)
rb:基圓9GN物理好資源網(原物理ok網)
nn:發生行9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
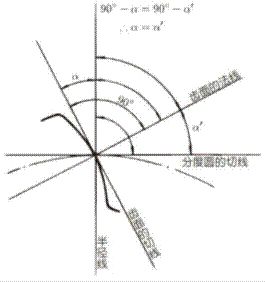
壓力角9GN物理好資源網(原物理ok網)
漸開線上任一點的法向壓力方向線(即該點的漸開線法線)與該點的速度方向之間的夾角稱為該點的壓力角。9GN物理好資源網(原物理ok網)
左下圖中αk為漸開線上K點的壓力角,從圖中可知:cosαk=ON/OK=rb/Rk。9GN物理好資源網(原物理ok網)
下圖中,壓力角是齒廓半徑線與切線之間的夾角。α為壓力角。由于α'=α,所以α'也是壓力角。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
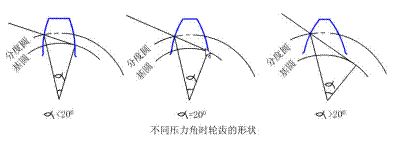
漸開線上各點的壓力角并不相等,基圓上的壓力角為零,齒頂圓上的壓力角最大。齒輪壓力角通常指節圓上的壓力角,用α表示。規定了節圓上壓力角的標準值,稱為標準壓力角。我國取α=20°。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
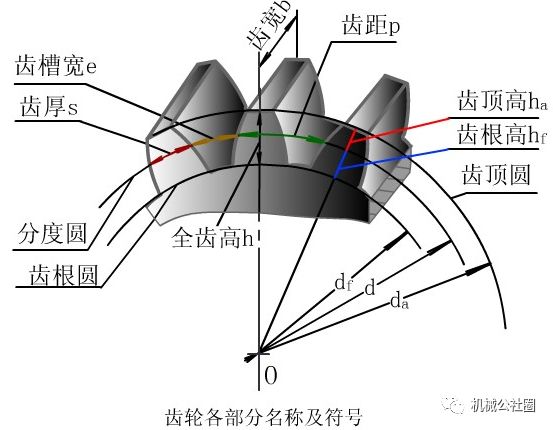
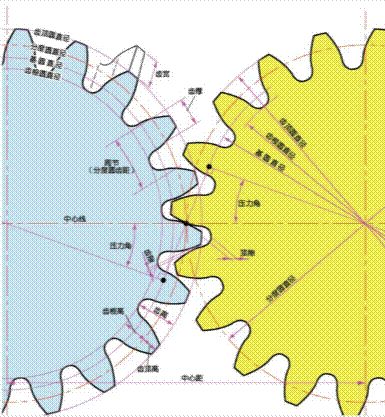
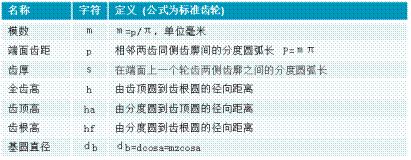
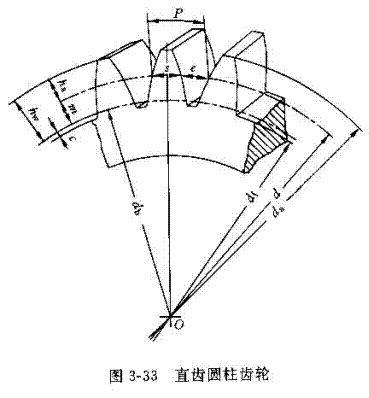
齒輪零件名稱及基本參數9GN物理好資源網(原物理ok網)
端面——垂直于齒輪軸線的平面9GN物理好資源網(原物理ok網)
法平面——垂直于齒線的平面9GN物理好資源網(原物理ok網)
齒線——齒面與分度圓柱面的交線9GN物理好資源網(原物理ok網)
基圓——漸開線母線在其上純滾動的圓9GN物理好資源網(原物理ok網)
齒寬b──輪齒沿軸向的尺寸9GN物理好資源網(原物理ok網)
參考齒條-按照標準齒輪規格切割的齒條稱為參考齒條9GN物理好資源網(原物理ok網)
節距:兩齒輪之間嚙合接觸點在中心線上留下的軌跡稱為節圓。9GN物理好資源網(原物理ok網)
Pitch:節距9GN物理好資源網(原物理ok網)
節圓--在齒頂圓與齒根圓之間,規定一個直徑為d的圓,作為計算齒輪各部分尺寸的依據。這個圓稱為節圓。節圓的尺寸由齒距和齒數決定。9GN物理好資源網(原物理ok網)
分界圓周長dπ=mz,d= pz/π9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
齒輪零件名稱及基本參數9GN物理好資源網(原物理ok網)
1. 節圓:齒輪上作為齒輪尺寸參考的圓,用d表示9GN物理好資源網(原物理ok網)
2、齒距:同一側相鄰兩齒的齒廓之間的節圓弧的長度,用p表示9GN物理好資源網(原物理ok網)
3.模數:齒距P與π的比值,以m表示9GN物理好資源網(原物理ok網)
4、壓力角:漸開線齒廓與節圓相交處的壓力角a。國家標準壓力角為20度。9GN物理好資源網(原物理ok網)
5、齒頂高:節圓至齒頂圓的徑向高度,以ha表示9GN物理好資源網(原物理ok網)
6、頂隙:兩齒輪裝配后,兩嚙合齒間沿徑向的間隙距離,用C表示。9GN物理好資源網(原物理ok網)
7、齒根高:齒節圓至齒根圓的徑向高度,用hf表示9GN物理好資源網(原物理ok網)
8、全齒高:齒頂圓至齒根圓的徑向高度,用h表示9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
★直齒輪的正確嚙合條件:等模數、等壓力角9GN物理好資源網(原物理ok網)
標準直齒輪尺寸計算公式表9GN物理好資源網(原物理ok網)
姓名9GN物理好資源網(原物理ok網)
象征9GN物理好資源網(原物理ok網)
計算公式9GN物理好資源網(原物理ok網)
齒距9GN物理好資源網(原物理ok網)
P=mπ9GN物理好資源網(原物理ok網)
齒厚9GN物理好資源網(原物理ok網)
s9GN物理好資源網(原物理ok網)
s=mπ/29GN物理好資源網(原物理ok網)
槽寬度9GN物理好資源網(原物理ok網)
埃9GN物理好資源網(原物理ok網)
e=mπ/29GN物理好資源網(原物理ok網)
齒高9GN物理好資源網(原物理ok網)
哈9GN物理好資源網(原物理ok網)
哈哈=哈哈※m9GN物理好資源網(原物理ok網)
齒根高9GN物理好資源網(原物理ok網)
高頻9GN物理好資源網(原物理ok網)
hf=(h??a※+C※)m9GN物理好資源網(原物理ok網)
全齒高9GN物理好資源網(原物理ok網)
h=(2ha※+C※)m9GN物理好資源網(原物理ok網)
節圓直徑9GN物理好資源網(原物理ok網)
d9GN物理好資源網(原物理ok網)
d = mz9GN物理好資源網(原物理ok網)
頂圓直徑9GN物理好資源網(原物理ok網)
大9GN物理好資源網(原物理ok網)
da=d±2ha9GN物理好資源網(原物理ok網)
根徑9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
自由度9GN物理好資源網(原物理ok網)
df=d±2hf9GN物理好資源網(原物理ok網)
基圓直徑9GN物理好資源網(原物理ok網)
D b9GN物理好資源網(原物理ok網)
db=dcosa=9GN物理好資源網(原物理ok網)
中心距9GN物理好資源網(原物理ok網)
a=m(Z2±Z1)/29GN物理好資源網(原物理ok網)
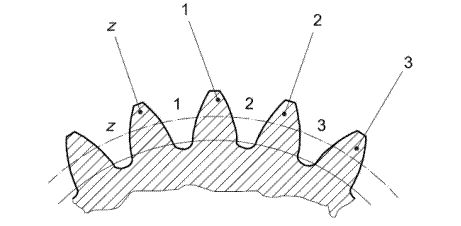
齒數及齒面9GN物理好資源網(原物理ok網)
齒數:從參考平面看,若按順時針方向測量,齒或槽定義為1、2、……,Z為總齒數。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
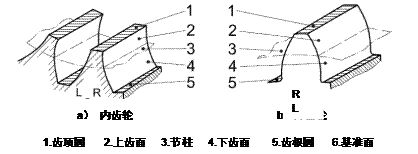
齒面:如何判斷齒面是左齒面還是右齒面?有2種方法:9GN物理好資源網(原物理ok網)
1、站在齒輪外面看齒,左手為左齒面,右手為右齒面。9GN物理好資源網(原物理ok網)
2、站在齒輪中心看齒槽,左手為左齒面,右手為右齒面。9GN物理好資源網(原物理ok網)
對于牙齒表面而言,無論采用哪種方法,結果都是一樣的。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
正常模塊和結束模塊9GN物理好資源網(原物理ok網)
法向模數是斜齒輪法向齒廓的模數;端部模數是斜齒輪端部齒廓的模數。9GN物理好資源網(原物理ok網)
法向模數(法向壓力角等)用于齒輪制造及強度校核,端部模數(端部壓力角等)用于結構尺寸計算。9GN物理好資源網(原物理ok網)
對于斜齒輪,端部模數mt與法向模數mn的換算公式為:9GN物理好資源網(原物理ok網)
(β:螺旋角)9GN物理好資源網(原物理ok網)
對于正齒輪:9GN物理好資源網(原物理ok網)
換擋9GN物理好資源網(原物理ok網)
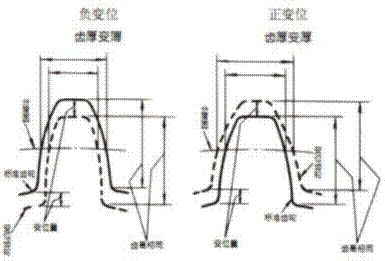
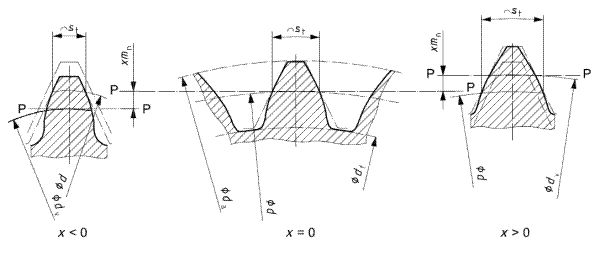
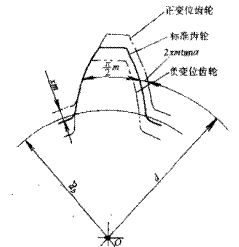
用展成法加工漸開線齒輪時,當齒條刀具中心線與齒坯節圓相切時,加工出的齒輪稱為標準齒輪。若其他條件不變,僅改變刀具與齒坯的相對位置壓力公式怎么算,使刀具中心線不再與齒坯節圓相切,加工出的齒輪稱為變位齒輪。9GN物理好資源網(原物理ok網)
齒條刀具中心線與齒輪毛坯節圓之間的距離稱為位移,用位移系數x與齒輪模數m的乘積來表示。當刀具距離齒輪中心較遠時,x>0,這樣的齒輪稱為正位移齒輪;反之,當刀具距離齒輪中心較近時,x>0。9GN物理好資源網(原物理ok網)
與標準齒輪相比,由于基圓不變壓力公式怎么算,所以齒廓曲線均為漸開線,但正排量齒輪采用曲率半徑較大的漸開線,而負排量齒輪采用曲率半徑較小的漸開線。9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
與標準齒輪相比,變位齒輪的模數、齒數、壓力角保持不變;9GN物理好資源網(原物理ok網)
對于正常的非錯位齒輪在節圓處:齒厚=齒隙寬度;對于錯位齒輪,由于加工時刀具的位置是改變的(比正常位置向外或向內),所以:齒厚≠齒隙寬度。9GN物理好資源網(原物理ok網)
當齒廓曲線向正偏時,遠離基圓,齒頂圓和齒根圓相應增大,齒根高減小,齒頂高增大,節圓齒厚和齒根圓齒厚增大,但齒頂有變尖的趨勢;9GN物理好資源網(原物理ok網)
當位移為負時,齒廓曲線段更接近基圓,齒頂圓和齒根圓也相應減小,齒根高增大,齒頂高減小,節圓齒厚和齒根圓齒厚均減小。9GN物理好資源網(原物理ok網)
PP:參考架的參考線9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
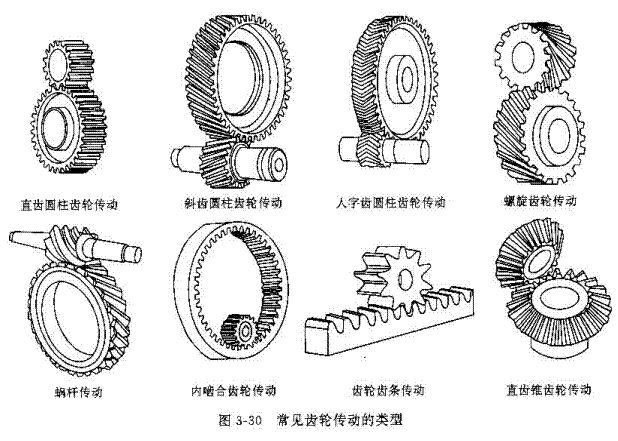
齒輪類型9GN物理好資源網(原物理ok網)
齒輪類型9GN物理好資源網(原物理ok網)
應用9GN物理好資源網(原物理ok網)
正齒輪、斜齒輪、人字齒輪9GN物理好資源網(原物理ok網)
平行軸傳動9GN物理好資源網(原物理ok網)
斜齒輪、蝸輪和蝸桿齒輪9GN物理好資源網(原物理ok網)
垂直交錯軸傳動9GN物理好資源網(原物理ok網)
內齒輪9GN物理好資源網(原物理ok網)
平行軸以相同方向驅動9GN物理好資源網(原物理ok網)
齒條和小齒輪9GN物理好資源網(原物理ok網)
旋轉運動與直線運動的轉換9GN物理好資源網(原物理ok網)
正錐齒輪9GN物理好資源網(原物理ok網)
相貫軸傳動9GN物理好資源網(原物理ok網)
 9GN物理好資源網(原物理ok網)
9GN物理好資源網(原物理ok網)
發表評論