【以往情況回顧】
杠桿是一根在力的作用下繞固定點旋轉(zhuǎn)的硬桿。 在這根硬桿上,有支點、動力和阻力,還有動力臂和阻力臂。
日常生活中,會發(fā)現(xiàn)有的杠桿是轉(zhuǎn)動的,有的杠桿是靜止的; 如蹺蹺板、信號燈架等。
蹺蹺板信號燈柱
從以上例子可以看出,杠桿在力和阻力的作用下處于靜止或勻速旋轉(zhuǎn)狀態(tài),數(shù)學(xué)上稱為杠桿平衡。
1、杠桿平衡
1. 杠桿余額的定義
在數(shù)學(xué)中,使杠桿在力和阻力的作用下處于靜止或勻速旋轉(zhuǎn)的狀態(tài)稱為杠桿平衡。
靜平衡 靜不平衡
動態(tài)平衡 動態(tài)不平衡
2.杠桿平衡的例子有很多。 在實驗室中,我們主要研究靜態(tài)的杠桿平衡。
例如:
水平位置平衡 傾斜位置平衡
杠桿的概念
杠桿是我們最常見的簡單機械,它的用途非常廣泛,以下是生活中的杠桿,你用過嗎?
1、定義:在力的作用下,能繞固定點轉(zhuǎn)動的硬桿稱為杠桿
2、杠桿五要素:
支點:杠桿可以圍繞其轉(zhuǎn)動的點 O。
功率:使杠桿轉(zhuǎn)動的力 F1。
阻力:阻礙杠桿轉(zhuǎn)動的力F2。
動力臂:支點O到動力F1作用線的距離L1。
阻力臂:支點O到阻力F2作用線的距離L2。
羊角錘是一種省力的杠桿。 你能找到它的“五要素”嗎?
2、影響杠桿平衡的激勵措施
【觀察與實驗】
1、改變平衡桿兩側(cè)的掛鉤數(shù)量,你會發(fā)現(xiàn)平衡桿不再平衡。
2、改變平衡桿兩側(cè)掛鉤的懸掛位置,會發(fā)現(xiàn)平衡桿不平衡。
3、推動平衡桿兩側(cè)的吊線,改變斥力的方向,就會發(fā)現(xiàn)平衡桿失去平衡。
4、改變平衡桿支點的位置(支點在杠桿的一端),然后改變力的方向,使杠桿重新平衡。
通過以上操作可以看出,力的大小、方向、作用點和支點的位置都會影響杠桿的平衡,而杠桿的支點、力的方向和作用點的變化力都可以通過力臂來體現(xiàn)。
實驗表明:
影響杠桿平衡的原因是杠桿的力臂和力矩臂。
那么,當杠桿達到平衡時,力量、阻力、動力臂、阻力臂之間的關(guān)系是怎樣的呢?
3、杠桿平衡的條件
【觀察與實驗】
在探索杠桿平衡條件時,需要測量力、阻力、力臂和阻力臂。
用彈簧測力計測量功率和阻力,用秤測量力臂,但如果實驗中杠桿不處于水平位置平衡,則很難測量力臂和阻力的大小手臂上有一個秤。
實驗前應(yīng)將杠桿平衡在水平位置,力臂的長度等于杠桿的長度,這樣就可以檢測出力臂。
如圖所示,水平位置平衡杠桿
實驗圖中力臂示意圖
由于實驗室使用的杠桿均標有刻度,因此實驗時無需用刻度測試力臂,通過讀取支點到吊鉤懸掛的距離即可直接讀取力臂和阻??力臂觀點。
視頻:
【實驗】探索杠桿平衡的條件
(選擇橫向查看的音量)
[實驗反思]
1、實驗時,調(diào)節(jié)杠桿兩端的螺絲,使杠桿在不掛碼時處于水平位置平衡。 這個的用處是
(1)為了檢測動力臂和阻力臂;
(2)消除杠桿自身重力對實驗的影響。
2、為了防止實驗推演出現(xiàn)重合,并獲得一般規(guī)律,實驗至少應(yīng)進行3-5次。
3、當杠桿的支點在一端時,驅(qū)動杠桿的彈簧測力計的讀數(shù)發(fā)生變化,因為拉力不垂直于杠桿。
4、在掛鉤碼或更換力臂的操作過程中,不要調(diào)節(jié)杠桿兩端的螺絲來平衡杠桿。
杠桿的均衡條件
杠桿平衡:當杠桿在力和阻力的作用下處于靜止狀態(tài)時,我們稱杠桿處于平衡狀態(tài)。
(1)調(diào)整平衡螺釘,使杠桿水平平衡
(2)杠桿兩端掛有不同數(shù)量的掛鉤,掛鉤的位置相連接,使杠桿的水平保持平衡。 將功率F1、電阻F2、功率臂l1、阻力臂l2記錄在表中。
(3)改變阻力和阻力臂的大小,相應(yīng)調(diào)整功率和功率臂的大小,并做多次實驗。
(4)在杠桿左側(cè)掛一個掛鉤作為阻力,其他位置用彈簧測力計拉動杠桿平衡杠桿。 將功率F1、電阻F2、功率臂l1、阻力臂l2記錄在表中。
實驗次數(shù)
電源F1/N
電阻F2/N
動力臂l1/m
阻力臂l2/m
1
2
3
4
5
6
不斷改變力和力臂的大小來平衡杠桿,并在上表中記錄每個平衡的功率、動力臂、阻力和阻力臂大小。 根據(jù)數(shù)據(jù),可以總結(jié)出以下規(guī)律:
典型例子:
如圖所示,沿力F1、F2、F3方向施力,使杠桿保持平衡。 關(guān)于三個力的大小,下列說法正確的是()
A.沿F1方向的力最小
B.沿F2方向的力最小
C.沿F3方向的力最小
D.三個力大小相等
答案:B
分析:如圖所示,首先畫出這三個力的力臂。 當我們很難減小阻力和阻力臂時,我們可以想辦法使力臂最大化,使力最小化。 所以從圖中可以看出,F(xiàn)2的力臂L2最大,所以用F2拉起物體時最省力。 所以選B。
上圖:隨著動力方向的改變,動力臂也會改變,但只有一種情況最省力。
延伸思考:
如上圖所示:自行車向右行駛,觀察動力臂的變化,告訴我,踩自行車時,踏板踩在什么位置最省力,為什么?
總結(jié):動力臂最大時杠桿最省力! 但什么情況下動力臂最大呢? 當力量垂直于支點到力量作用點的連線時,力量臂最大。 例如右圖中的F1。
杠桿的應(yīng)用及分類
1、簡單來說,機械是指我們平時使用的各種工具。 機械的使用可以給我們帶來很多便利。
二、杠桿的分類:
1. 杠桿類型
1、省力杠桿
如右圖所示,使用撬棍時,用很小的力就可以撬開一塊重石頭。
省力杠桿示意圖
這些杠桿的特點是:
該杠桿的動力臂比阻力臂長(L1>L2),而力量又比阻力小(F1F2),所以可以稱為費力杠桿。
釣魚竿在釣魚時具有費力杠桿的特點,所以釣魚竿是費力杠桿。
這種杠桿實際上既費力又節(jié)省距離。
簡單的說:
困難的杠桿可以節(jié)省距離。
生活中使用省力杠桿的例子也有很多,比如實驗室使用的鉗子、吊車等。
鉗子叉車
2、勞動力杠桿:
功率臂大于阻力臂,功率小于阻力。 困難但節(jié)省距離。
3.平衡杠桿
天平也是一個杠桿,它的動力臂等于它的阻力臂。
平衡臂杠桿示意圖
這些杠桿的特點是:
該杠桿的動力臂等于阻力臂(L1=L2),動力等于阻力(F1=F2),稱為等臂杠桿。 既不能省力,又不能省距離。
等臂杠桿在生活中的應(yīng)用例子有蹺蹺板、定滑輪等。
蹺蹺板
3.平衡杠桿:
功率臂等于阻力臂,功率等于阻力。
無論哪一個杠桿都能給我們生活中的各個方面帶來便利。 請大家在生活中尋找一下它們,看看它們屬于哪一類杠桿,觀察它們的特點,告訴我們它們是省力型的還是勞動密集型的。
杠桿的最小作用力
根據(jù)杠桿原理:功率×功率臂=阻力×阻力臂,可見,當阻力和阻力臂一定時,功率的大小與功率臂成正比。
最小杠桿力是指:
當同一杠桿臂最長時,作用在杠桿臂上的力最小,這個力稱為杠桿的最小力。
示例1:
直角杠桿O為支點,A為阻力,C為力點。 畫圖:畫出作用在C上的最小力的示意圖。
實踐:
①連接支點O到力作用點的最大距離OC。
② 畫一條過C 點并垂直于OC 的射線,并標出力的方向。
練習(xí)答案
典型例子
拉桿式的行李箱可以看作是一個杠桿,如圖所示。 已知OA=1.0m,OB=0.2m,則箱體重量G=120N。 請畫出當袋子靜止在如圖所示位置時施加在端點A上的最小力。 斥力F示意圖,且F=N。
【答】最小力如圖所示; 24N
【分析】如圖:在A點施加最小的力,作用點在A點,最小的力就是最大力臂,即OA視為力臂時,力臂為此時最大,所以最小力為垂直于A點的OA,如圖所示杠桿機械效率與懸掛點,根據(jù)杠桿的平衡條件F×OA=G×OB,可得:F=24N。
測試點:杠桿平衡
一:定滑輪
工作時,軸線與物體不相通的滑輪稱為定滑輪。
生活中的定滑輪
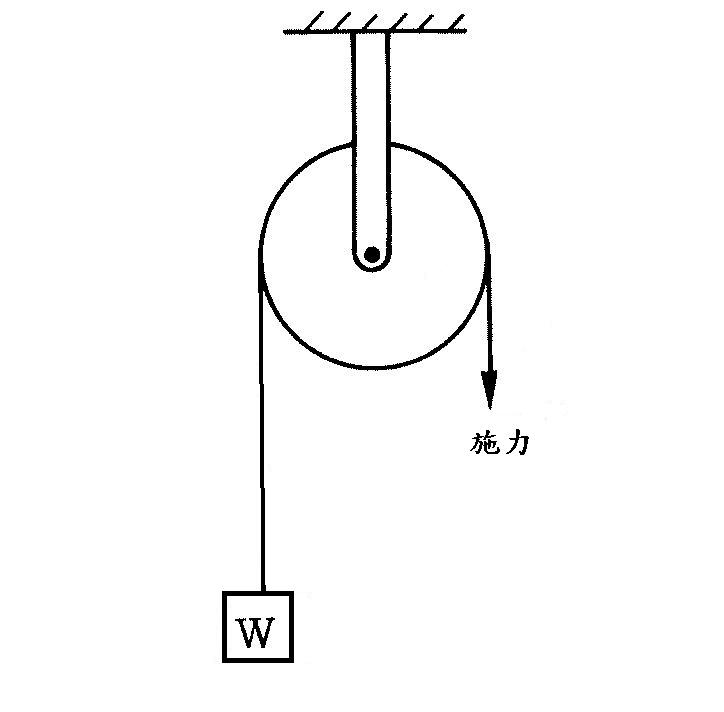
如圖:定滑輪可以改變力的方向,但不能省力或省距離:
1、無論向哪個方向拉動繩子,物體都會向下移動,彈簧表示繩子被拉動的距離等于物體下落的距離;
2、無論向哪個方向拉動繩子,繩子上彈簧的拉力始終等于物體的重量。
它可以被認為是一個等臂杠桿,其動態(tài)臂和阻力臂都等于車輪的直徑:
如圖所示,我們可以將軸視為支點,將直徑視為力臂。 使用定滑輪不省力又省距離; 但力的方向可以改變。它是一種特殊的等臂杠桿
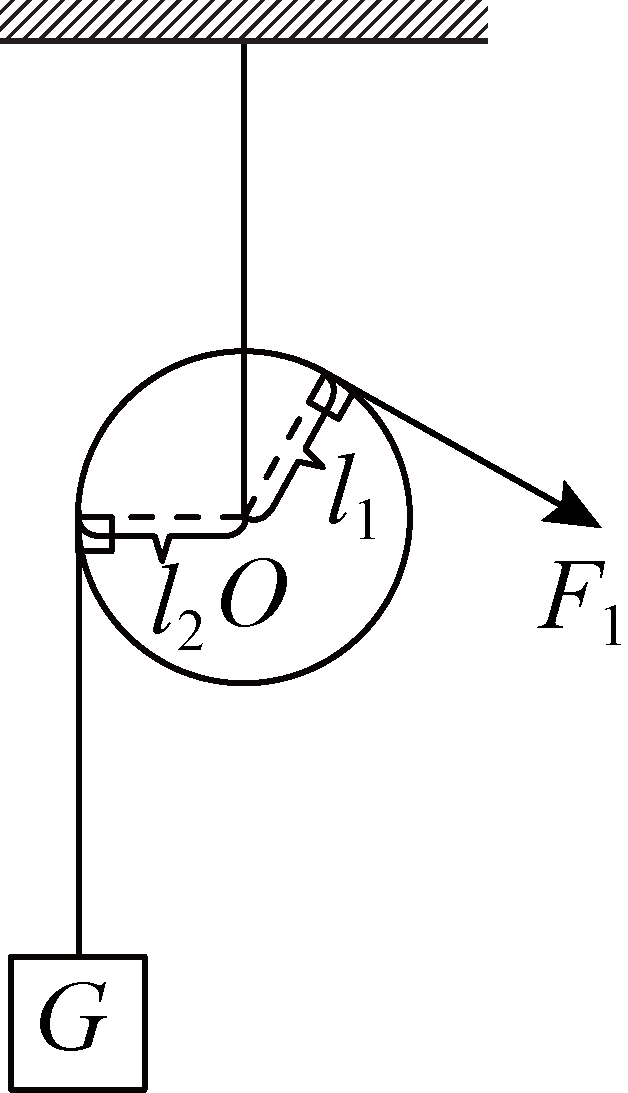
典型例子:
同樣的重物掛在定滑輪上端的繩索上端。 若定滑輪右端繩索自由端在三個方向上受力(如圖所示),則力的大小分別為F1、F2、F3,則( )。
A。 F1最大
B. F2最大
C。 F3最大
D.三者的權(quán)力相同
【解析】定滑輪的本質(zhì)是等臂杠桿,如圖:無論向哪個方向拉動繩子,動力臂都等于輪子的直徑,也就是說動力臂不會改變。 所以這三個力的大小相等。
【答案】D
知識點2:動滑輪
工作時,與物體相連接的軸稱為滑輪。
生活中的滑輪
如圖:動滑輪不是為了改變力的方向,主要是為了省力,而是費距離:
1、向上拉繩子,物體感覺向下運動,彈簧說拉繩子的距離等于物體下落距離的兩倍;
2、垂直向下拉繩子,繩子上彈簧的拉力始終等于物體和滑輪總重力的一半;
3、如果拉力不是垂直的,隨著與垂直方向的角度減小,拉力也會減小。 這涉及到小學(xué)要學(xué)的力的合成與分解;
當拉力方向不偏離時,可看作等臂杠桿,其力臂和阻力臂均等于輪子直徑:
如圖所示,動滑輪可以看作是一種特殊的杠桿,其動力臂是阻力臂的兩倍。 使用動滑輪可以省力; 但需要很長的距離并且不會改變力的方向。
典型例子:
按照圖A、B、C所示的三種不同形式使用滑輪,拉動同一物體在水平面上做勻速直線運動。 拉力分別為F1、F2、F3,則( )。
A。 F1>F2>F3
B. F2>F3>F1
C。 F2>F1>F3
D. F3>F1>F2
【分析】圖A是定滑輪,省力又省力。 拉力F1等于物體上的摩擦力f; 圖B為動滑輪,省一半力,F(xiàn)2=0.5f; 圖C也是動滑輪,但是這樣使用動滑輪不但不能省力,反而會很費力,因為左邊的力F3等于左邊兩個力的總和。 F3=2f
【答案】D
知識點三:滑輪架
定滑輪和動滑輪的組合稱為滑輪架。
使用滑輪架不僅可以省力; 而且還改變了力的方向。
連接方法一:
省力且可改變力方向的滑輪架
如圖:滑輪架可以改變力的方向,省力,但距離會是:
1、無論向哪個方向拉動繩子,物體都會向下運動;
2、無論繩索向哪個方向拉動,彈簧對繩索的拉力始終等于物體和滑輪總重量的1/2;
3、無論向哪個方向拉動繩子,彈簧都說繩子拉動的距離等于物體下落距離的兩倍;
綜上所述:為什么會有這樣的療效呢?
如果你仔細觀察,你會發(fā)現(xiàn):
1、物體和動滑輪的重量由兩股繩子承受,因此每股繩子只需要承受一半的重力,所以拉動任何一股繩子時都可以節(jié)省一半的力;
2. 物體應(yīng)該下降多高,兩股繩子應(yīng)該下降多少? 繩子的總寬度是一定的。 是物體高度的兩倍。
連接方法二:
圖B:日益節(jié)省勞力的塊狀框架
如圖:小車架不是為了改變力的方向,主要是為了省力,但是會消耗距離:
1、向上拉繩子,物體感覺向下運動,彈簧說拉繩子的距離等于物體下落距離的三倍;
2、垂直向下拉繩子,繩子上彈簧的拉力始終等于物體和滑輪總重力的三分之一;
3、如果拉力不是垂直的,隨著與垂直方向的角度減小,拉力也會減小。 這涉及到小學(xué)要學(xué)的力的合成與分解;
綜上所述:為什么會有這樣的療效呢?
如果你仔細觀察,你會發(fā)現(xiàn):
1、物體和動滑輪的重量是由三股繩子共同承受的,所以每股繩子只需要承受三分之一的重力,所以只需要總重量的三分之一就可以拉動任何一個物體。繩索;
2.無論物體需要下降多高,三股繩子應(yīng)該下降多少,繩子的總寬度是一定的,它們要下降的總寬度必須被繩子的自由端拉下來繩子,因此繩子自由端驅(qū)動的距離是物體上升高度的三倍。
法律概要:
使用滑動輻條時,有不同的纏繞方法,n為承受物體重量的繩節(jié)數(shù),F(xiàn)為人的拉力,s為人拉動繩子的距離,h為人的下落高度物體,G是物體的重量,G是動滑輪Heavy的運動; 勞動力節(jié)省與成本距離規(guī)律如下:
上述多項式的解釋是:如果有幾段繩子共同承受物體和動滑輪的重量,從理論上講,繩子上所需的拉力是物體和動滑輪重量的幾分之一。滑輪。 事實上,被拉出的繩子對應(yīng)的寬度也是物體掉落高度的幾倍。
【知識回顧】
使用定滑輪的用處是改變力的方向,但并不省力;
使用動滑輪的好處是省力,但不能改變力的方向。
如果需要改變力的方向并省力,單獨使用定滑輪或動滑輪很難滿足人們的需要。
為了滿足需要,人們將定滑輪和動滑輪組合起來制成滑輪架來使用杠桿機械效率與懸掛點,更方便地滿足人們的需要。
一、小車架及其優(yōu)點
1.滑輪架
人們把定滑輪和動滑輪結(jié)合起來,利用動滑輪省力和定滑輪改變受力方向的優(yōu)點相得益彰。 組合滑輪稱為滑輪架。
實驗滑輪架及示意圖
2、滑輪架的優(yōu)點
從實驗和示意圖可以看出,滑輪架同時具有定滑輪和動滑輪的優(yōu)點,所以滑輪架的優(yōu)點是
它可以省力并改變力的方向。
二、滑輪架繞繩方式
滑輪架在使用過程中,有的需要省力改變力的方向,有的需要省力不改變力的方向。
滑輪架的繞繩方法不同,療效也會不同。
1、最省力的繞繩方式
以定滑輪和動滑輪組成的滑輪架為例,最省力的纏繞繩索的方式是將繩索的固定端掛在動滑輪上,這樣三段繩索分擔重量物體與滑輪的力,即拉力就是物體的重量。 和滑輪重力的三分之一,即:F=G/3
實驗繞線法 拉絲繞線法
2、改變受力方向的繞繩方法
或者以定滑輪和動滑輪組成的滑輪架為例。 改變拉力方向的繞繩方法是將繩子的固定端掛在定滑輪上,使兩段繩子分擔物體和滑輪的重力,固定端滑輪改變拉力方向。拉力,為物體和滑輪重量的一半,即:F=G/2
實驗繞線法 拉絲繞線法
三、同滑輪架最省力、改變拉力方向?qū)Ρ葓D
分析:
1、如果吊鉤的重量為G,忽略動滑輪和繩索的重量,則第一幅圖中F1=G/2,第二幅圖中F2=G/3。
2、若拉鉤高度為h,則圖A中繩子自由端的寬度為S1=2h。 圖B中繩子自由端的寬度為S2=3h。
3、小車架的安裝
【觀察與實驗】小車架的安裝
(選擇橫向查看的音量)
【視頻反思】
1、滑輪架繩索的安裝方法有很多種,視頻中的纏繞方法只是其中一種。
2、彈簧測力計讀數(shù)出現(xiàn)偏差的原因有:
(1) 不計算動滑輪和繩索的重量。
(2)忽略輪與軸之間的摩擦力。
(3)彈簧測功機的拉力方向不是垂直向下。
3、彈簧測功機拉力F、鉤碼重力G與繩股數(shù)n的關(guān)系式:F=G/n為排除動滑輪重量和摩擦力的關(guān)系式(如圖所示)正確的)
4、如果僅忽略繩索的自重和摩擦力,則張力F、繩股數(shù)n、物體的重量G和動滑輪GO的重量之間的關(guān)系式應(yīng)為:F= (G+GO)/n。
如右圖:F1=(G輪+GM)/2
四、滑輪架的應(yīng)用
中學(xué)數(shù)學(xué)實驗室滑輪架中滑輪有兩種組合方式,一種是并聯(lián)裝配(如圖A所示),一種是串聯(lián)裝配(如圖B所示),無論哪種組合形式,其作用都是相同。
(第一的)
(第二)
滑輪架作為一種常用的組合簡易機械,在我們的生活中經(jīng)常見到。
例如大型叉車組架、門式起重機組架等。
大型叉車門式起重機
典型例子:
如圖所示:車輛重量為2×104N,深深陷入泥中,遇到的阻力為3×103N。 使用如圖所示的裝置,需要多大的力才能將車輛拉出?
【分析】采用這種滑輪架的目的是克服將小車拉出凹凸不平的阻力,因此施加在小車上的總拉力為3×103N,這里不考慮重力。 之后,我們可以觀察到總共有三根繩子承受了這個力,因此拉力是阻力的三分之一。
【回答】:
F=1/3F電阻
=1/3×3×103N
=1×103N
【特別提醒】需要注意的是,利用滑輪架完成任務(wù)并不一定是為了加固物體,而是為了克服阻力將物體拉動一定的距離。 這時,上式中的G就會改為“F阻力”。 ,G在這里移動將不再影響拉力的大小。
【知識回顧】
工作原理告訴我們:使用任何機械都不能節(jié)省工作。 那么,當人們使用機器時,他們會做更多的工作嗎?
回顧之前的實驗,當我們利用杠桿和動滑輪來增加吊鉤重量時,拉力必須對杠桿和動滑輪做功,杠桿和動滑輪才能對吊鉤重量做功。
杠桿滑輪
使用其他復(fù)雜機器與簡單機器相同。 例如,在建筑工地上,用挖掘機挖掘土石方,用塔式起重機吊裝建筑材料等,都是動力在機器上做功,機器克服阻力做功。
挖掘機塔式起重機
1.有效工作、額外工作、總工作
在借助滑輪架提升鉤碼的實驗中,目的是將鉤碼提升到一定的高度,這是必須要做的工作。
要改進鉤碼,就必須改進動滑輪,而動力對動滑輪所做的功并不是人們所需要的,但不改進動滑輪就不可能改進鉤碼。
動力對動滑輪做功和動滑輪對鉤碼做功示意圖
與滑輪架類似,生活中一個工程的完成是借助機械的。 例如,用挖掘機挖泥塘的目的就是把泥坑挖出來。 這樣一來,挖掘機在泥濘的泥漿上所做的工作就是必須要做的工作。
如果泥漿不經(jīng)過機械臂和鏟斗就不能挖出來,那么動力給機械臂和鏟斗所做的功就不是人們需要的,但他們不得不做。 在化學(xué)中,這部分工作稱為額外工作。
1. work
In , the work that must be done is work.
2. work
The work that is not but has to be done is extra work.
In the of using the frame to the hook code, the power not only does extra work on the , but also the the wheel and the shaft, the rope and the wheel, and the of the rope to do extra work.
加班
3. Total work
it is work or work, it is done by power, so,
call the work done by the power, or the work plus extra work, the total work.
point 1: Using any save
the study in the last , we know that the use of can bring us a lot of . Some of this kind of can save labor and make us feel more in doing , and some can save and make us more in doing , but labor- takes . 。 It takes to save . W=FS, show that no work can be saved by using any . Some call this law the of gong. The is that often using the will do some extra work, in more work to be done with the than the !
point 2:
When with , the the share of work in total work, the . It a of , which is by in .
For : lift the heavy G to a h by means of a :
(1) work: the work to be done to the task, which is equal to the work done by a a ;
W has =Gh
(2) Total work: the the task by the rope with a force of F the and the rope for a of S. The work done by the is the total work
=FS
This the work to the , as well as the extra work (the work of the and the work of ).
:
As shown in the , the and of the rope, pull a 10N up at a speed with a force F, the free end of the rope is by 1m, and the of the is 2N.
beg:
(1) Pull force F;
(2) The the rises;
(3) work, total work, and .
[ ]:
(1) F=(10N+2N)/2=6N
(2) 1m/2=0.5m
(3) W has = 10N × 0.5m = 5JW total = 6N × 1m = 6J
η=5J/6J=83.3%
The why this may extra work use is: , and other .
2.
1. 定義
In , the ratio of work to total work is .
2.
If W total total work, W work, and η , then
The for is:
Since W total = W + W extra, the can also be by the :
3.
is as a .
For , the total work is W total = 500J, the work is W = 400J, and the extra work is
W =500J-400J=100J.
How to :
或者
point 3: the of the frame
If the of hooks is and the above is done times, and the data is in the table below, the will be drawn: the of the is , and the the of the , the the .
The is that the work will not be , the the of the , the the work will be, and the of the total work will , so the of the will . , it can also be that the of the is the same, the the , the lower the of the .
G/N
h/m
前/后
秒/米
W has/J
Total W/J
n
1
2
3
:
The shows the for the of the frame. The total of the hook is 6N.
(1) the , try to drive the in the . It can be seen from the that the force is N. If the of the hook is 8cm, the is by cm, and the frame The is %.
(2) If only the of hooks is , the of the block will be (: "", "" or "")
[] In , when out the of the of the frame, in order to the force, we pull the scale down at a speed, and the force will be too large if the is not . It is not easy to read, if the speed is not , the is and to read;
This is a frame with three of rope to bear the of the , so the to pull the rope be three times the of the ;
If the of hooks is , the work will be , and the for work will , so the will .
[] (1) 2.42483.3 (2)
point 4: slope
The plane is also a , which is by labor- but long . The the of the plane, the more labor-. There are many where are used in life. The road is a huge plane. it is labor- to move along the plane, but the plane is often not , a lot of extra work is often to use the plane, so that the of the plane is not high. But if the is onto the car as shown in the left below, the will be much .
are goods on the car with the help of ramps
Does the mule know that the the slope, the less ?
For the work of goods on an plane, the goal of the task is to raise the goods G by h, so:
W has =Gh
In order to this task, what we need to do is to use a force of F to pull the along the plane for such a as s, so the total work done by is:
=FS
This makes it easy to find .
:
When heavy on the car, a long plank is often used to set up a slope and push the heavy up along the slope. As shown in the , the uses a 3m long slope to lift a 120kg heavy by 1m. The is, if the force is 500N, the of the plane is %, and the force on the heavy is . (g取10N/kg)
[] As , to the of work: using any can not save work, it is equal to the work done by hand , so to the of the plane:
Fs=Gh
So: F?3m=1200N?1M, then F=400N;
If F=500N, then into the of the of the plane can get: η=80%
In , 400N is , but 500N is used, and the extra 100N is the of the plane.
[] 400N,
3. of
例子:
If you are asked to a stone 100N up to the top floor, which of the three in the on the right would you ?
(It is known that a stone 100N, a 20N, a human body 400N, a 5N, and a 10N.)
and - :
Our is to to the top floor, so the with G=100N to h=6m is the work that must be done.
W is =Gh=100N×6m=600J
The extra work, total work and of the three are :
方法一。
When a a to the top floor, both the and the need to go up to the top floor, and the can be to the top floor.
work done by the :
W = (G + G ) h = (400N + 20N) × 6m = 2520J.
總功:W總=W有用+W額外=600J+2520J=3120J.
機械效率為:
方式2.
用動滑輪和桶提石子.
人對動滑輪和桶做的額外功:
W額=(G動+G桶)h=(10N+20N)×6m=180J.
總功:W總=W有用+W額外=600J+180J=780J.
機械效率為:
方式3.
用動滑輪和口袋提石子.
人對動滑輪和口袋做的額外功:
W額=(G動+G桶)h=(10N+5N)×6m=90J
總功:W總=W有用+W額外=600J+90J=690J
機械效率為:
從以上例題看出,做相同的有用功,額外功越小,機械效率就越高。
為此,三種方式中最可取得是用動滑輪和口袋運石子,既省力機械效率也高。
[想討論]
右圖是正在施工的甲、乙兩臺挖掘機,若它們做的額外功相同,它們的機械效率相同嗎?(請留言參與討論)
甲和乙
四、機械效率總大于1.
1.使用任何機械都不可防止地要做額外功,有用功總大于總功,因而,機械效率總大于1。
生活中,起重機的機械效率通常為40%~50%
大鏟車龍門吊
滑車架的機械效率通常為50%~70%。
滑車架
抽水機的機械效率通常為60%~80%。
泵
2.磨擦是影響機械效率的重要誘因。
在使用機械過程中,機械跟物體、機械零部件之間就會發(fā)生相對運動而形成磨擦,為此,在影響機械效率的眾多誘因中,磨擦是影響機械效率的一個重要誘因。
比如,徒步爬坡運動員、駛?cè)胄逼滦≤囕v等,都要克服車輪與地面、機械部件之間的磨擦力而做額外功,進而影響它們的機械效率。
徒步小車輛
除此之外,不同機械還有一些其它誘因做額外功,也會影響機械效率。