理論熱學滑動磨擦D6l物理好資源網(wǎng)(原物理ok網(wǎng))
一、靜滑動磨擦力1、定義:兩接觸物體,形成相對滑動D6l物理好資源網(wǎng)(原物理ok網(wǎng))
趨勢時,其接觸面形成制止物體相對運動趨勢的力叫靜(滑D6l物理好資源網(wǎng)(原物理ok網(wǎng))
動)磨擦力。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
(就是接觸面對物體作用的切向約束力)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
2、狀態(tài):①靜止:Fs=F;凡隨F的降低而降低,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
理論熱學滑動磨擦D6l物理好資源網(wǎng)(原物理ok網(wǎng))
一、靜滑動磨擦力1、定義:兩接觸物體,形成相對滑動D6l物理好資源網(wǎng)(原物理ok網(wǎng))
趨勢時滑動摩擦力的原理,其接觸面形成制止物體相對運動趨勢的力叫靜(滑D6l物理好資源網(wǎng)(原物理ok網(wǎng))
動)磨擦力。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
(就是接觸面對物體作用的切向約束力)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
2、狀態(tài):①靜止:Fs=F;凡隨F的降低而降低,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
但有一臨界值。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
|N②臨界:(將滑未滑)最大靜磨擦力D6l物理好資源網(wǎng)(原物理ok網(wǎng))
%""I_虹出x=Js*n靜滑動磨擦質(zhì)數(shù))D6l物理好資源網(wǎng)(原物理ok網(wǎng))
z/7/L/z所以減小磨擦力:①加***向壓力D6l物理好資源網(wǎng)(原物理ok網(wǎng))
的途徑為②加大靜磨擦乘數(shù)/s。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
3、特征:’大小:0V貝匕尤mx(平衡范圍)滿足£尤=0D6l物理好資源網(wǎng)(原物理ok網(wǎng))
靜磨擦力特征」方向:與物體相對滑動趨勢方向相反D6l物理好資源網(wǎng)(原物理ok網(wǎng))
定理:球飲=人?人D6l物理好資源網(wǎng)(原物理ok網(wǎng))
(兒只與材料和表面情況有關(guān),與接觸面積大小無關(guān)。)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
二、動滑動磨擦力(與靜滑動磨擦力不同的是形成了滑動)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
大小:F』=f?Fn(無平衡范圍)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
動磨擦力特征方向:與物體運動方向相反D6l物理好資源網(wǎng)(原物理ok網(wǎng))
定理:D6l物理好資源網(wǎng)(原物理ok網(wǎng))
偵只與材料和表面情況有關(guān),與接觸面積大小無關(guān)。)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
磨擦角與自鎖現(xiàn)象D6l物理好資源網(wǎng)(原物理ok網(wǎng))
—、摩擦角D6l物理好資源網(wǎng)(原物理ok網(wǎng))
①全約束力即Fr=Fn+Fs,它與接觸面的公法線成一偏D6l物理好資源網(wǎng)(原物理ok網(wǎng))
角伊,當物體處于臨界平衡狀態(tài),即靜磨擦力達到最大值D6l物理好資源網(wǎng)(原物理ok網(wǎng))
環(huán)穌時,偏角看到最大值伽全約束力與法線傾角的最大D6l物理好資源網(wǎng)(原物理ok網(wǎng))
值們稱作磨擦角。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
FrD6l物理好資源網(wǎng)(原物理ok網(wǎng))
maxD6l物理好資源網(wǎng)(原物理ok網(wǎng))
②計算D6l物理好資源網(wǎng)(原物理ok網(wǎng))
=上二fR廣磨擦角的余弦等D6l物理好資源網(wǎng)(原物理ok網(wǎng))
0Fn一Fn一人于靜磨擦乘數(shù)。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
當物塊的滑動趨勢方向改變時,全約束力作用線的方位也急劇改變;在臨界狀態(tài)下,F(xiàn)r的D6l物理好資源網(wǎng)(原物理ok網(wǎng))
作用線將畫出一個以接觸點A為頂點的工件,稱為磨擦錐。設(shè)物塊與支承面間沿任何方D6l物理好資源網(wǎng)(原物理ok網(wǎng))
向的磨擦質(zhì)數(shù)都相同,即磨擦角都相等,則磨擦錐將是一個內(nèi)角為卻的圓柱。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
③摩擦錐:內(nèi)角為2的錐體。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
④測定磨擦質(zhì)數(shù)的一種簡易方式D6l物理好資源網(wǎng)(原物理ok網(wǎng))
借助磨擦角測定耕磨擦質(zhì)數(shù)D6l物理好資源網(wǎng)(原物理ok網(wǎng))
20fD6l物理好資源網(wǎng)(原物理ok網(wǎng))
二、自鎖現(xiàn)象D6l物理好資源網(wǎng)(原物理ok網(wǎng))
物塊平衡時,靜磨擦力不一定達到最大值,可在零與D6l物理好資源網(wǎng)(原物理ok網(wǎng))
最大值Fmax之間變化,所以全約束力與法線間的傾角殖D6l物理好資源網(wǎng)(原物理ok網(wǎng))
在零與磨擦角饑之間變化滑動摩擦力的原理,即D6l物理好資源網(wǎng)(原物理ok網(wǎng))
0V"V饑D6l物理好資源網(wǎng)(原物理ok網(wǎng))
因為靜磨擦力不可能超過最大值,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
因而全約束力的作用線也不可能超D6l物理好資源網(wǎng)(原物理ok網(wǎng))
出磨擦角以外,即全約束力必在摩D6l物理好資源網(wǎng)(原物理ok網(wǎng))
擦角之內(nèi)。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
將磨擦錐反向,判定主動力是否D6l物理好資源網(wǎng)(原物理ok網(wǎng))
在反向磨擦錐內(nèi)來確定是否平衡。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
1、如果作用于物塊的全部主動力的D6l物理好資源網(wǎng)(原物理ok網(wǎng))
。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
這些現(xiàn)象稱為自鎖現(xiàn)象。由于在這些D6l物理好資源網(wǎng)(原物理ok網(wǎng))
情況下,主動力的合力Fr與法線間的D6l物理好資源網(wǎng)(原物理ok網(wǎng))
傾角。沖因而,F(xiàn)r和全約束力Fw必D6l物理好資源網(wǎng)(原物理ok網(wǎng))
能滿足二力平衡條件,且e=0v啊。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
由于在公法線上有SFv=OF^=D6l物理好資源網(wǎng)(原物理ok網(wǎng))
而4、=%sin。%costanQ=人tan。V%tan仞=虬期D6l物理好資源網(wǎng)(原物理ok網(wǎng))
所以在切線上必然平衡。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
2、如果全部主動力的合力ErD6l物理好資源網(wǎng)(原物理ok網(wǎng))
 D6l物理好資源網(wǎng)(原物理ok網(wǎng))
D6l物理好資源網(wǎng)(原物理ok網(wǎng))
的作用線在磨擦角伽之外,則D6l物理好資源網(wǎng)(原物理ok網(wǎng))
無論這個力如何小,物塊一定D6l物理好資源網(wǎng)(原物理ok網(wǎng))
會滑動。由于在這些情況下,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
e>收而ewe”支承面的D6l物理好資源網(wǎng)(原物理ok網(wǎng))
全約束力Fra和主動力的合力D6l物理好資源網(wǎng)(原物理ok網(wǎng))
Fr不能滿足二力平衡條件。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
應用這個道理,可以設(shè)法避D6l物理好資源網(wǎng)(原物理ok網(wǎng))
免發(fā)生自鎖現(xiàn)象。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
3、自鎖應用舉例D6l物理好資源網(wǎng)(原物理ok網(wǎng))
斜面的自鎖條件是斜面的夾角大于或等于磨擦角。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
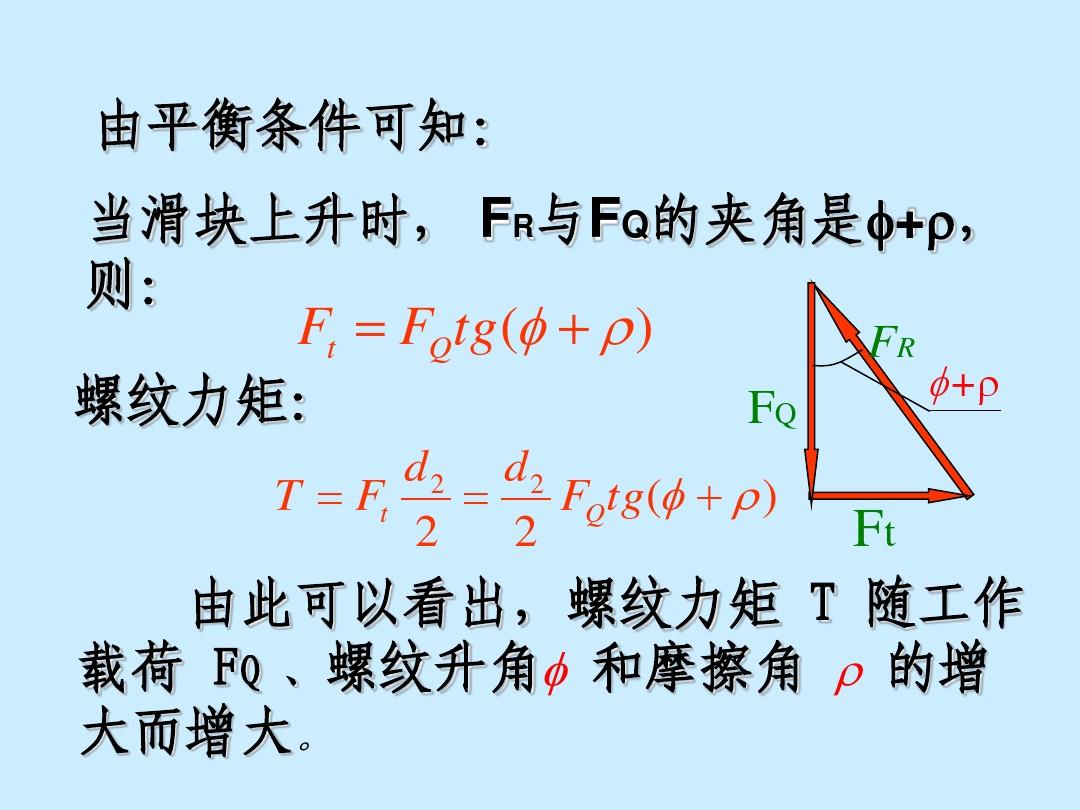
要使螺紋自鎖,必須使螺紋的升角。大于或等于磨擦角方。因而螺紋的自D6l物理好資源網(wǎng)(原物理ok網(wǎng))
斜面的自鎖條件就是螺紋的自鎖條件。由于螺紋可以看成為繞在一圓錐體上的斜面,螺D6l物理好資源網(wǎng)(原物理ok網(wǎng))
紋升角。就是斜面的夾角。螺絲相當于斜面上的滑塊4,加于螺絲的軸向荷載P,相當物D6l物理好資源網(wǎng)(原物理ok網(wǎng))
塊A的重力,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
鎖條件是D6l物理好資源網(wǎng)(原物理ok網(wǎng))
a斜面的自鎖條件是斜面的夾角大于或等于磨擦角。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
要使螺紋自鎖,必須使螺紋的升角。大于或等于磨擦角方。因而螺紋的自D6l物理好資源網(wǎng)(原物理ok網(wǎng))
斜面的自鎖條件就是螺紋的自鎖條件。由于螺紋可以看成為繞在一圓錐體上的斜面,螺D6l物理好資源網(wǎng)(原物理ok網(wǎng))
紋升角。就是斜面的夾角。螺絲相當于斜面上的滑塊4,加于螺絲的軸向荷載P,相當物D6l物理好資源網(wǎng)(原物理ok網(wǎng))
塊A的重力,D6l物理好資源網(wǎng)(原物理ok網(wǎng))
鎖條件是D6l物理好資源網(wǎng)(原物理ok網(wǎng))
a自鎖應D6l物理好資源網(wǎng)(原物理ok網(wǎng))
用實列D6l物理好資源網(wǎng)(原物理ok網(wǎng))
[例]水平梯子置于直角V形槽內(nèi),略去梯重,梯子與兩個斜D6l物理好資源網(wǎng)(原物理ok網(wǎng))
面間的磨擦質(zhì)數(shù)(磨擦角均為0),如人在梯子上走動,試D6l物理好資源網(wǎng)(原物理ok網(wǎng))
剖析不使梯子滑動,人的活動應限制在哪些范圍內(nèi)?D6l物理好資源網(wǎng)(原物理ok網(wǎng))
解:①作法線和D6l物理好資源網(wǎng)(原物理ok網(wǎng))
,B點的磨擦角啊D6l物理好資源網(wǎng)(原物理ok網(wǎng))
交E,G兩點D6l物理好資源網(wǎng)(原物理ok網(wǎng))
E,G兩點間的水平距D6l物理好資源網(wǎng)(原物理ok網(wǎng))
離CQ為人的活動范圍D6l物理好資源網(wǎng)(原物理ok網(wǎng))
證明:由幾何關(guān)系ZAEB=ZAGB=90。D6l物理好資源網(wǎng)(原物理ok網(wǎng))
AC=AEcos(30°+氣)=ABsD6l物理好資源網(wǎng)(原物理ok網(wǎng))