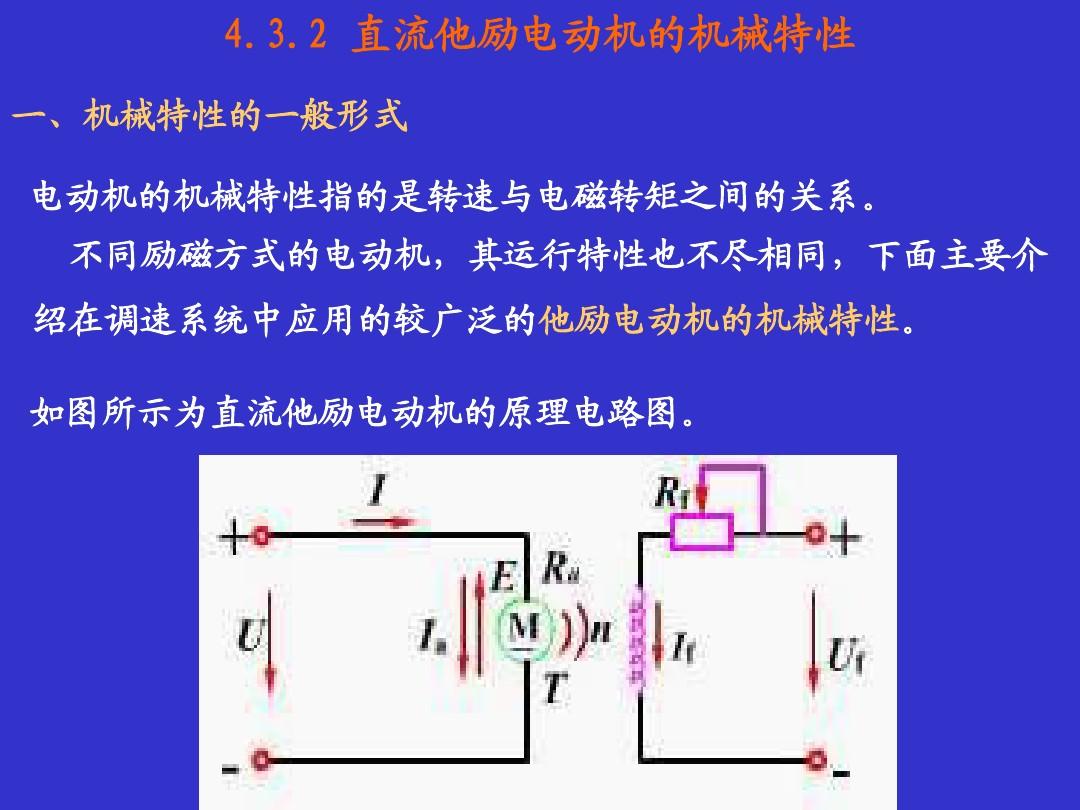
1、1、固有機械特點、固有機械特點2、人為機械特點、人為機械特點3、串勵和復(fù)勵直流電動機、串勵和復(fù)勵直流電動機第第7講講他勵直流電動機的機械特點他勵直流電動機的機械特點一、機械特點的通常表達(dá)式一、機械特點的通常表達(dá)式直流電動機的機械特點直流電動機的機械特點是指電動機在集電極電流是指電動機在集電極電流U、勵磁電壓、勵磁電壓If、電樞回路內(nèi)阻柵極回路內(nèi)阻Ra為恒值的條件下,即電動機處于穩(wěn)態(tài)運行時,電動機為恒值的條件下,即電動機處于穩(wěn)態(tài)運行時,電動機的怠速與電磁力矩之間的關(guān)系。的怠速與電磁力矩之間的關(guān)系。n=f(T)CnT()0eUnC2aeT
2、RRCC其中:其中:稱為理想空載怠速;稱為理想空載怠速;稱為機械特點的斜率。稱為機械特點的斜率。二、他勵直流電動機固有機械特點二、他勵直流電動機固有機械特點CC當(dāng)當(dāng)時的機械特點稱為固有機械特點:時的機械特點稱為固有機械特點:0NNUU,,R他勵直流電動固有機械特點有以下特征:他勵直流電動固有機械特點有以下特性:(1)電磁力矩越大,怠速越低,是一條下)電磁力矩越大,怠速越低,是一條下斜直線;斜直線;二、他勵直流電動機固有機械特點二、他勵直流電動機固有機械特點(3)斜率)斜率,其值很小,特點較平,為硬特點,力矩變,其值很小,特點較平,為硬特點
3、,力矩變化時,怠速變化很小,斜率大時,稱為軟特點。化時,怠速變化很小,斜率大時,稱為軟特點。2RCC(2)T=0時,時,為理想空載怠速。此時為理想空載怠速。此時Ia=0,Ea=UN;(4)當(dāng))當(dāng)T=TN直流電機啟動電流過大,n=nN,怠速差,怠速差為額定怠速差。為額定怠速差。二、他勵直流電動機固有機械特點二、他勵直流電動機固有機械特點(5)n=0時,即馬達(dá)啟動時,時,即馬達(dá)啟動時,,定子電壓,定子電壓稱為啟動電壓,稱為啟動電壓,電磁力矩電磁力矩稱為啟動扭矩。因為定子內(nèi)阻較小,稱為啟動力矩。因為定子內(nèi)阻較小,啟動電壓和占空比都比額定值大。啟動電壓和占空比都比額定值大
4、。tss以上剖析時機械特點在第一象限的情況,有:以上剖析時機械特點在第一象限的情況,有:0s0Na;0;二、他勵直流電動機固有機械特點二、他勵直流電動機固有機械特點(6)若)若TTs,nTs,則,則IaIs,即,即創(chuàng)立,只有創(chuàng)立,只有Ea0,n0,機械特點在第四靈限。,機械特點在第四靈限。;ITI(7)若)若Tn0,此時電磁力矩方向與怠速相反,由拖,此時電磁力矩方向與怠速相反,由拖動性變?yōu)閯x車性,此時動性變?yōu)閯x車性,此時IaUN,怠速,怠速nn0,機械特點在
5、第二象限,實際上他勵直流馬達(dá)的電磁功機械特點在第二象限,實際上他勵直流馬達(dá)的電磁功率率,輸入功率,輸入功率,馬達(dá)工,馬達(dá)工作在發(fā)電狀態(tài)。作在發(fā)電狀態(tài)。例題例題3-8;3-9(一)定子串內(nèi)阻時的人為機械特點(一)定子串內(nèi)阻時的人為機械特點特征:特征:()理想空載怠速()理想空載怠速n0不變不變()()n與與成反比成反比Rnn特點曲線為通過特點曲線為通過n0點的射線點的射線C=UN,=N,串內(nèi)阻串內(nèi)阻R三、他勵直流電動機人為機械特點三、他勵直流電動機人為機械特點當(dāng)改變當(dāng)改變或或或或得到的機械特點稱為人為機械特點。得到的機械特點稱為人為
6、機械特點。+R1Ra+R2固有固有人為人為(二)改變勵磁電流時的人為機械特點(二)改變勵磁電流時的人為機械特點Ra=N特征:特征:()()n0U()()n與與無關(guān)無關(guān)Un0n,一組平行線一組平行線三、他勵直流電動機人為機械特點三、他勵直流電動機人為機械特點CNaeet(三)減小磁路時的人為機械特點(三)減小磁路時的人為機械特點UN,Ra三、他勵直流電動機人為機械特點三、他勵直流電動機人為機械特點改變每極磁路的人為機械特點改變每極磁路的人為機械特點如圖所示,特點較軟。如圖所示,特點較軟。四、
7、根據(jù)馬達(dá)標(biāo)牌計算機械特點四、根據(jù)馬達(dá)標(biāo)牌計算機械特點(1)(1)依據(jù)經(jīng)驗計算依據(jù)經(jīng)驗計算EaN:093097aNN(-)E.UeNCaNE由理想空載怠速公式可得:由理想空載怠速公式可得:由上式可知,倘若能曉得額定勵磁電動勢由上式可知,倘若能曉得額定勵磁電動勢或或Ra,便可以,便可以求出求出,因而求出理想空載怠速,進(jìn)而求出理想空載怠速n0。依照理想空載點(依照理想空載點(n0,0)和額定工作點()和額定工作點(nN,TN)就可)就可以通過這兩點連成直線,就是馬達(dá)的固有機械特點曲線。以通過這兩點連成直線,就是馬達(dá)的固有機械特點曲線。
8、在馬達(dá)的標(biāo)牌數(shù)據(jù)中,可以曉得在馬達(dá)的標(biāo)牌數(shù)據(jù)中,可以曉得nN,而理想空載怠速,而理想空載怠速n0和額定力矩和額定扭矩TN卻是未知的。卻是未知的。四、根據(jù)馬達(dá)標(biāo)牌計算機械特點四、根據(jù)馬達(dá)標(biāo)牌計算機械特點具體步驟:具體步驟:(1)計算計算EaN或?qū)崪y(或計算)或?qū)崪y(或計算)Ra;(2)估算估算;eNC(3)估算理想空載怠速估算理想空載怠速n0:(4)估算估算TN;21223()IPRI(2)依據(jù)所選直流馬達(dá),實測或則計算定子回路內(nèi)阻依據(jù)所選直流馬達(dá),實測或則計算定子回路內(nèi)阻Ra:表示電動機額定運行時,定子銅耗占總耗損的表示電動機額定運行時,定子銅耗占總耗損的1/2到到1/
9、3。(二)人為特點的勾畫(二)人為特點的勾畫在固有機械特點多項式在固有機械特點多項式n=n0-T的基礎(chǔ)上,按照的基礎(chǔ)上,按照人為特點所對應(yīng)的參數(shù)人為特點所對應(yīng)的參數(shù)R或或U或或變化(感應(yīng)變化(感應(yīng)電動勢和電磁力矩等會相應(yīng)變化),重新估算電動勢和電磁力矩等會相應(yīng)變化),重新估算n0和和,之后得到人為機械特點方程式。,之后得到人為機械特點方程式。例題例題3-10四、根據(jù)馬達(dá)標(biāo)牌計算機械特點四、根據(jù)馬達(dá)標(biāo)牌計算機械特點解:解:(11)計算)計算RRa25250().IPRI(22)估算)估算CCeen
10、00.RCn五、串勵直流電動機的機械特點五、串勵直流電動機的機械特點如下圖為串勵直流電動機框圖,如下圖為串勵直流電動機框圖,當(dāng)當(dāng)IIaa較小,磁通不飽和時:較小,磁通不飽和時:馬達(dá)怠速可以表示為:馬達(dá)怠速可以表示為:其中,其中,電磁力矩等式可寫為:電磁力矩多項式可寫為:其中,其中,因而得到馬達(dá)怠速公式:因而得到馬達(dá)怠速公式:eefaf;aCCKRRRRICaffff;aIIKIKIIICKR五、串勵直流電動機的機械特點五、串勵直流
11、電動機的機械特點曲線如圖曲線如圖3,馬達(dá)怠速與扭矩平方根成正比,當(dāng)電磁馬達(dá)怠速與扭矩平方根成正比,當(dāng)電磁力矩減小,怠速增加很快,機械特點很軟。力矩減小,怠速增加很快,機械特點很軟。若電壓若電壓Ia太大,磁通飽和,太大,磁通飽和,基本不變,機械特點接近基本不變,機械特點接近于他勵直流電動機,機械特點變硬。于他勵直流電動機,機械特點變硬。總結(jié):總結(jié):(1)是一條非線性的軟特點;)是一條非線性的軟特點;(2)當(dāng)電磁力矩特別小時,)當(dāng)電磁轉(zhuǎn)矩十分小時,怠速很高所以不容許空載運行;怠速很高所以不容許空載運行;(3)電磁力矩與定子電壓的平)電磁力矩與定子電壓的平方成反比,因而啟動力矩方成反比,因而啟動力矩大,大,過載倍數(shù)強。過載倍數(shù)強。如圖為復(fù)勵直流電動機的如圖為復(fù)勵直流電動機的接線圖。若串勵和并勵定子的接線圖。若串勵和并勵定子的極性相同,稱極性相同,稱積復(fù)勵積復(fù)勵直流電機啟動電流過大,否則為,否則為差復(fù)勵差復(fù)勵。積復(fù)勵直流電動機的機械積復(fù)勵直流電動機的機械特點介于他勵和串勵直流電動特點介于他勵和串勵直流電動機特點之間,具有串勵電動機機特點之間,具有串勵電動機的啟動力矩大,過載倍數(shù)強,的啟動力矩大,過載倍數(shù)強,但空載怠速不高等優(yōu)點。但空載怠速不高等優(yōu)點。曲線如圖曲線如圖2。六、復(fù)勵直流電動機的機械特點六、復(fù)勵直流電動機的機械特點I-+串勵定子串勵定子并勵定子并勵定子