電動勢,是導體內電子運動的必要條件,也是電子運動趨勢的一種表現,因此具有一定的方向性。
電動勢的方向,規定為從電源的正極,經過電源內部指向電源的負極,即與電源兩端電流的方向相反。
反電動勢,是指由反抗電壓發生改變的趨勢而形成電動勢。
反電動勢通常出現在電磁線圈中,如熔斷器線圈、電磁閥、接觸器線圈、電動機、電感等。
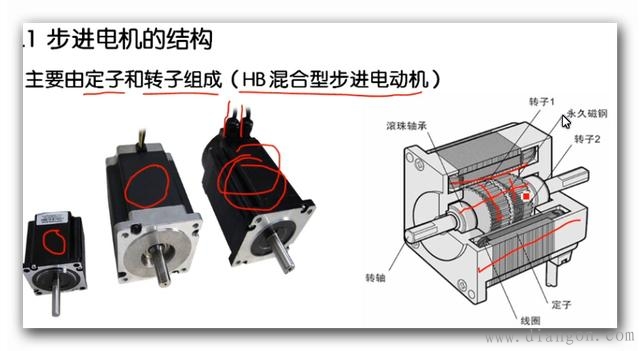
?對于電動機產品,轉子部份是電能的輸入端,而定子部份則是馬達做功的輸出端;通過轉子部份輸入的電能,一部份用于定子部份做功,另一部份則會消耗于線路電阻,以及其他耗損。
定子部份形成的反電動勢,即電動機做功的要素。反電動勢消耗了電路中的電能,但它并不是一種“損耗”,與反電動勢對應的那部份電能,將轉化為用電設備的能量輸入。
影響馬達反電動勢的誘因,包括轉子定子的阻值、轉子磁極形成的磁場、轉子角速率和轉子與定子之間的氣隙。
變壓器的輸出電流、繞線式定子馬達的定子開路電流,是比較直觀的可以檢測的感應電動勢,也是反電動勢;
對于永磁同步馬達,通過某種形式將定子拖動后,在轉子定子的接線端檢測馬達的反電動勢。
?馬達的反電動勢,是阻礙馬達電壓的要素,假若電動機運行時,因為負載過大、機械性故障等誘因而停轉,這時就沒有反電動勢,相當于阻值很小的定子線圈,直接被接在電源兩端,額定電流下的電壓會很大,電動機定子將會由于電壓過大而毀壞。
由此我們就可以較好地理解,馬達堵轉試驗、電機起動頓時,由于定子處于靜止狀態下,沒有反電動勢的抵抗,是造成電壓非常大的根本緣由。
?同樣的,對于馬達的輸入電流較低的情況,馬達定子難以轉動電機負載電流過大的原因,也無反電動勢形成,電動機也就很容易被燒掉。
步進馬達的一些特征:
1.通常步進馬達的精度為步進角的3-5%,且不累積。
2.步進馬達外表容許的最高氣溫。步進馬達體溫過低首先會使馬達的磁性材料退磁,進而造成扭力增長乃至于失步,因而馬達外表容許的最高氣溫應取決于不同馬達磁性材料的退磁點;通常來講,磁性材料的退磁點都在攝氏130度以上,有的甚至高達攝氏200度以上,所以步進馬達外表氣溫在攝氏80-90度完全正常。
3.步進馬達的轉矩會隨怠速的下降而升高。當步進馬達轉動時,馬達各相定子的電感將產生一個反向電動勢;頻度越高,反向電動勢越大。在它的作用下,馬達隨頻度(或速率)的減小而相電壓降低,進而造成扭力增長。
4.步進馬達低速時可以正常運轉,但若低于一定速率就沒法啟動,并伴有嘯喊聲。步進馬達有一個技術參數:空載啟動頻度,即步進馬達在空載情況下才能正常啟動的脈沖頻度,假如脈沖頻度低于該值,馬達不能正常啟動,可能發生丟步或堵轉。在有負載的情況下,啟動頻度應更低。假如要使馬達達到高速轉動,脈沖頻度應當有加速過程,即啟動頻度較低電機負載電流過大的原因,之后按一定加速度升到所希望的高頻(馬達怠速從低速升到高速)。
步進電動機以其明顯的特征,在數字化制造時代發揮著重大的用途。伴隨著不同的數字化技術的發展以及步進馬達本身技術的提升,步進馬達將會在更多的領域得到應用。
步進馬達廣泛應用于醫療機械、3D復印機等精密儀器上,是目前十分常見的馬達,而提到馬達驅動,不得不提及的就是TMC馬達驅動芯片了,美國推出的步進馬達驅動芯片在步進馬達行業中,仍然是頂級的存在。擁有多項專利技術,使步進馬達運行更靜音,更平穩,還有堵轉檢查及節能專利技術。