(廣州民航航天學(xué)院宇航大學(xué)上海使用磁扭力器控制俯仰軸帶有偏置動(dòng)量的衛(wèi)星的姿態(tài)時(shí),沿地磁場方向的控制轉(zhuǎn)矩難以保證。撓度控制策略借助磁扭力器形成控制轉(zhuǎn)矩,加速動(dòng)量矩矢量繞軌道法線方向的旋轉(zhuǎn)速率磁力矩器,使進(jìn)動(dòng)控制方向更快的與地磁場方向分離,步入進(jìn)動(dòng)控制的有利位置。針對(duì)運(yùn)行在太陽同步軌道的偏置動(dòng)量衛(wèi)星,推論了加入撓度控制項(xiàng)后,其俯仰軸磁矩的表達(dá)式。借助蟻群算法)對(duì)磁扭力器控制策略中進(jìn)動(dòng)反饋系數(shù),章動(dòng)反饋系數(shù)個(gè)系數(shù)進(jìn)行了尋優(yōu),借助優(yōu)化的結(jié)果進(jìn)行仿真實(shí)驗(yàn)。比較撓度控制策略和精典控制策略的仿真試驗(yàn)結(jié)果,證明在常年外部干擾轉(zhuǎn)矩下磁力矩器,采用剛制可以改善進(jìn)動(dòng)控制效率,提升姿態(tài)控制精度。飛行動(dòng)力學(xué)中圖分類號(hào)448。,),,rithm(。
;;均采用了上述方案。對(duì)地定向的近地軌道衛(wèi)星常常采用偏置動(dòng)量輪加磁扭力器進(jìn)行姿態(tài)控制。常見的布置方案之置動(dòng)量矩的方向指向俯仰軸的負(fù)方向,同時(shí)將磁扭力器裝在衛(wèi)星的俯仰軸上。此種方案通過調(diào)整動(dòng)量輪怠速來控制俯仰軸姿態(tài),同時(shí)借助磁扭力器能在滾轉(zhuǎn)2偏航平面內(nèi)輸出控制轉(zhuǎn)矩,可以控制滾轉(zhuǎn)軸和偏航軸姿態(tài)。我國風(fēng)云一號(hào)精典控制策略精典控制策略中對(duì)衛(wèi)星姿態(tài)的控制包括進(jìn)動(dòng)控制和章動(dòng)控制個(gè)部份。進(jìn)動(dòng)控制使衛(wèi)星動(dòng)量矩和軌道法線負(fù)方向重合,去除姿態(tài)誤差,章動(dòng)控制清除姿態(tài)角速率。收稿日期作者簡介,上海人,碩士生。com。:磁扭力器的撓度控制技術(shù)及應(yīng)用687進(jìn)動(dòng)控制。
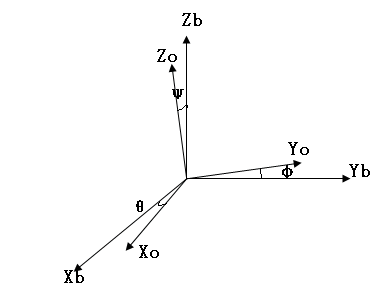
假定在外擾動(dòng)扭矩下,衛(wèi)星的動(dòng)量矩矢量方向以小姿態(tài)角偏離了軌道法線的負(fù)方向。由俯仰軸負(fù)方向看去,動(dòng)量矩矢量在座標(biāo)系中的位置如圖所示。進(jìn)動(dòng)控制方式就是使用控制轉(zhuǎn)矩將其控制回原點(diǎn)。knx和knz的定義與式精典控制策略缺點(diǎn)使用磁扭力控制衛(wèi)星姿態(tài)的基本原理是將其與衛(wèi)星所在位置的月球磁場硬度叉乘控制轉(zhuǎn)矩的方向是由磁矩方向和其所處空間的磁場硬度的方向和確定形成的控制轉(zhuǎn)矩的方向也是確定的所以控制轉(zhuǎn)矩的方向取決于磁場硬度的方向。這引起有些時(shí)侯磁扭力器所能提供的控制轉(zhuǎn)矩的方向與希望的控制轉(zhuǎn)矩的方向不一致球磁場方向合適時(shí)才會(huì)進(jìn)行控制。所以因?yàn)榈卮艌鑫茨芴峁┘皶r(shí)的控制轉(zhuǎn)矩控制過程中存在滯后撓度控制策略假定在外擾動(dòng)扭矩下衛(wèi)星偏航軸和滾轉(zhuǎn)軸各有小姿態(tài)角誤差。由俯仰軸負(fù)方向看去動(dòng)量矩矢量在座標(biāo)系中的位置見圖進(jìn)動(dòng)控制示意圖進(jìn)動(dòng)控制采用比列控制反饋扭矩大小和姿態(tài)誤差大小成反比。在小姿態(tài)角誤差的情況下取代。進(jìn)動(dòng)控制的轉(zhuǎn)矩為項(xiàng)分別代表施加在衛(wèi)星滾轉(zhuǎn)、俯仰和偏航軸上的控制轉(zhuǎn)矩;kpkpz分別是控制轉(zhuǎn)矩的比列系數(shù)。據(jù)悉因?yàn)楦┭鐾ǖ篮推渌麑⑵淇刂妻D(zhuǎn)矩假定為章動(dòng)控制。假定在外擾動(dòng)轉(zhuǎn)矩下衛(wèi)星偏航軸和滾轉(zhuǎn)軸有了小的姿態(tài)角速率誤差角速率矢量端點(diǎn)在座標(biāo)系中的投影位置如圖所示。
章動(dòng)控制方式就是使用控制轉(zhuǎn)矩將其控制回原點(diǎn)。用控制轉(zhuǎn)矩使動(dòng)量矩矢量進(jìn)動(dòng)到地磁場可以提供控制轉(zhuǎn)矩的方向上。這樣月球磁場可以在一個(gè)軌道周期內(nèi)盡可能多地提供進(jìn)動(dòng)控制和章動(dòng)控制轉(zhuǎn)矩。章動(dòng)控制示意圖撓度控制的轉(zhuǎn)矩為ksx取代。章動(dòng)控制的轉(zhuǎn)矩為的定義與式撓度控制設(shè)計(jì)方式控制轉(zhuǎn)矩情況選擇不同的kp可以得到不同的控制策略。得到精典控制策略中俯仰軸磁矩的表達(dá)式反饋系數(shù)選定撓度控制策略的動(dòng)力學(xué)多項(xiàng)式中包括kpz兩個(gè)時(shí)變參數(shù)通過其穩(wěn)定性條件來求解穩(wěn)定區(qū)域比較困難。在工程上個(gè)別解決方案是將各未知參數(shù)而且對(duì)于像太陽同步軌道這樣接近磁子午面的軌道