你好,我之前也有這個問題,然后我自己推導(dǎo)一下,供你參考。 如果我錯了,請告訴我。
Step1,我們先明確一下,這個電路中的變量有哪些? 我認(rèn)為有三個,1.輸入電流i; 2、感應(yīng)電動勢e; 3、端電壓u,其他參數(shù)如匝數(shù)、電感、磁通量等要么是固定值,要么是由其他參數(shù)推導(dǎo)出來的。 不影響我們的分析。 你的問題是,為什么感應(yīng)電動勢和自感應(yīng)電動勢方向相反? 在這三個變量中,只有輸入電流是自變量和“原因”。 另外兩個是這個自變量的“結(jié)果”。 注意:在電容器電路中,情況正好相反。
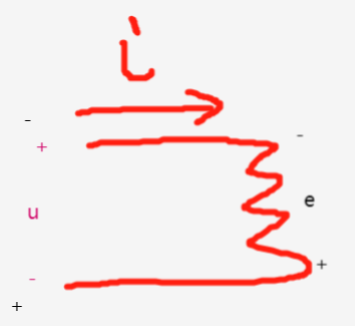
步驟2:明確因果關(guān)系后,我們自己畫出電路,首先定義自變量i的方向為向右(也可以向左,這對結(jié)果沒有影響,可以推導(dǎo)出自己做吧)。 那么電感感應(yīng)出的電動勢就可以看成是一個電源,方向是正向下,負(fù)向上,因為電動勢:非靜電力使正電荷從負(fù)極移動到正極。電池做功,規(guī)定了電池內(nèi)部負(fù)極到正極(低電位到高電位)。 方向是積極的。
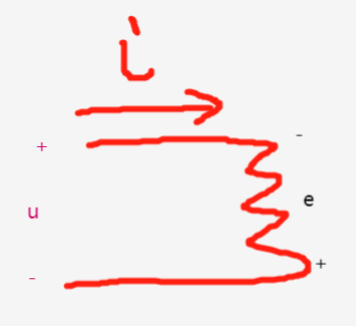
步驟3:此時定義端電壓u的方向,根據(jù)關(guān)聯(lián)方向定義,正向上,負(fù)向下。 所以根據(jù)基爾霍夫電壓定律。 u = -e,根據(jù)e=-Lfrac{di}{dt},所以u=Lfrac{di}{dt}。 但請注意,這個公式代表的是參考方向,u和e是等價且相反的。 我們以電流i為正弦函數(shù)為例來分析整個過程的實際方向。
Step4,假設(shè)i=sint,t≥0,則曲線如下圖所示,共有ABCD4個面積。 黃色虛線表示當(dāng)前斜率 di/dt。
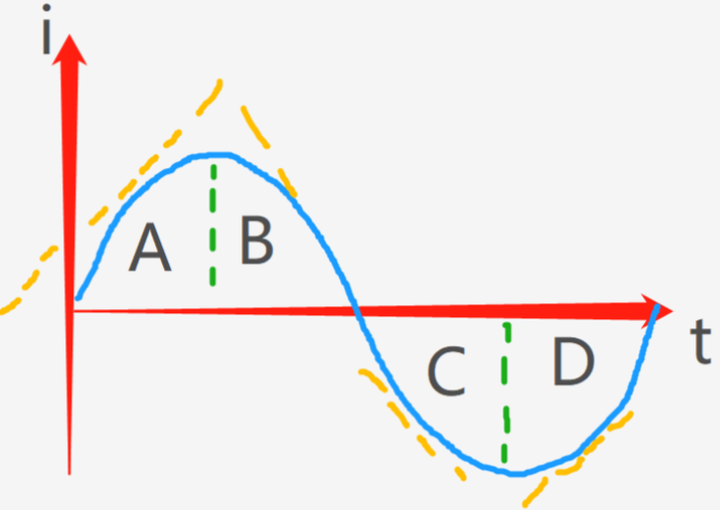
步驟4
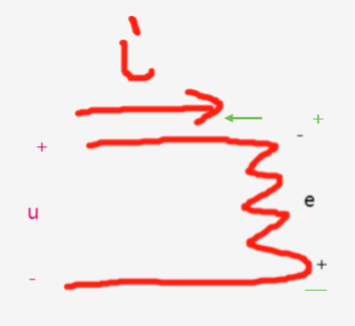
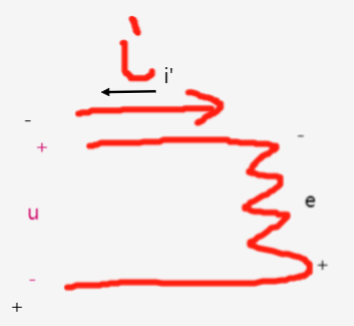
Step5、A區(qū),0,di/dt>0">i>0,di/dt>0,表示實際電流i(red i)在關(guān)聯(lián)參考方向,即向右,但是有逐漸增大的趨勢,根據(jù)楞次定律,為了抵消這種增大,電感感應(yīng)電動勢e會產(chǎn)生一個與e的參考方向相反的感應(yīng)電動勢,所以是正上負(fù)下(見綠色部分,虛擬感應(yīng)電流如綠色箭頭所示),但端電壓u的方向仍然是正負(fù)(相對于感應(yīng)電動勢,相當(dāng)于負(fù)載)。實際的 u 和實際的 e 相等且方向相反(原因是基爾霍爾電壓定律)。
步驟5
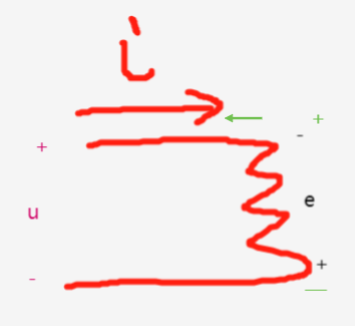
Step6、B區(qū),0,di/dti>0,di/dt,表明實際電流i在相關(guān)參考方向上,即向右,但有逐漸減小的趨勢。 根據(jù)楞次定律,電感感應(yīng)電動勢 e 為抵消這種減小,將產(chǎn)生與參考方向相同方向的感應(yīng)電動勢,因此它是向上且負(fù)的(黑色部分),但端電壓的方向u向上,負(fù)值(相對于感應(yīng)電動勢,相當(dāng)于負(fù)載)。 見下文。 從這個圖中我們可以看出,實際的u和實際的e也是相等且方向相反的(原因是基爾霍夫電壓定律)。
步驟6
Step7、區(qū)域C中,i表示實際電流i處于非關(guān)聯(lián)參考方向,即向左,即i',但有逐漸增大的趨勢(持續(xù)增大到負(fù)幅值)。 根據(jù)楞次定律感應(yīng)電動勢和感應(yīng)電流,為了抵消這種增加,電感器的感應(yīng)電動勢e將產(chǎn)生與e相同參考方向的感應(yīng)電動勢,因此向上且為負(fù)且低于正(黑色部分),但是端電壓u的方向為上、下正。 (左邊黑字相當(dāng)于負(fù)載相對于感應(yīng)電動勢)。 見下文。 從這個圖中我們可以看出,實際的u和實際的e也是相等且相反的。
步驟7
Step8,在D區(qū)域,0">i0,表示實際電流i在非關(guān)聯(lián)參考方向,即向左,即i',但有逐漸減小的趨勢(不斷減小到0根據(jù)楞次定律,為了抵消這種減少,電感感應(yīng)電動勢e會產(chǎn)生一個與e的參考方向相反的感應(yīng)電動勢,所以是正上負(fù)(綠色部分)感應(yīng)電動勢和感應(yīng)電流,但方向是e。端電壓u正上負(fù)(相對于感應(yīng)電動勢,相當(dāng)于負(fù)載),從這個圖中我們可以看出,實際的u和實際的e也是相等且相反的。
步驟8
綜上所述,在簡化的電路網(wǎng)絡(luò)中,端電壓u和感應(yīng)電動勢e必須具有相等且相反的參考方向,因為
1. 等價的根本原因:基爾霍夫電壓定律。 該電路中只能有一個電源,即感應(yīng)電動勢e,和一個負(fù)載,即端電壓u。 兩者必須相等。
2、方向相反的根本原因:電流i、端電壓u、感應(yīng)電動勢e的參考方向選擇不同。
然而,在實際電路中,根據(jù)電流的方向及其隨時間的微分,感應(yīng)電勢e和端電壓u的實際方向與相應(yīng)的相關(guān)方向不一定相同。