動(dòng)量、沖量和動(dòng)量定律
(一)動(dòng)量
1、動(dòng)量:運(yùn)動(dòng)物體的質(zhì)量和速率的乘積稱(chēng)作動(dòng)量。是矢量,方向與速率方向相同;動(dòng)量的合成與分解,按平行四邊形法則、三角形法則。是狀態(tài)量;一般說(shuō)物體的動(dòng)量是指運(yùn)動(dòng)物體某一時(shí)刻的動(dòng)量,估算物體此時(shí)的動(dòng)量應(yīng)取這一時(shí)刻的瞬時(shí)速率。是相對(duì)量;物體的動(dòng)量亦與參照物的選定有關(guān),一般情況下,指相對(duì)地面的動(dòng)量。單位是kg·m/s;
2、動(dòng)量和動(dòng)能的區(qū)別和聯(lián)系
①動(dòng)量的大小與速率大小成反比,動(dòng)能的大小與速率的大小平方成反比。即動(dòng)量相同而質(zhì)量不同的物體,其動(dòng)能不同;動(dòng)能相同而質(zhì)量不同的物體其動(dòng)量不同。
②動(dòng)量是矢量,而動(dòng)能是標(biāo)量。為此,物體的動(dòng)量變化時(shí),其動(dòng)能不一定變化;而物體的動(dòng)能變化時(shí),其動(dòng)量一定變化。
③因動(dòng)量是矢量,故導(dǎo)致動(dòng)量變化的誘因也是矢量,即物體遭到外力的沖量;動(dòng)能是標(biāo)量,導(dǎo)致動(dòng)能變化的誘因亦是標(biāo)量,即外力對(duì)物體做功。
④動(dòng)量和動(dòng)能都與物體的質(zhì)量和速率有關(guān),二者從不同的角度描述了運(yùn)動(dòng)物體的特點(diǎn),且兩者大小間存在關(guān)系式:P2=2mEk
3、動(dòng)量的變化及其估算方式
動(dòng)量的變化是指物體末態(tài)的動(dòng)量除以初態(tài)的動(dòng)量,是矢量,對(duì)應(yīng)于某一過(guò)程(或某一段時(shí)間),是一個(gè)十分重要的數(shù)學(xué)量,其估算方式:
(1)ΔP=Pt-P0,主要估算P0、Pt在一條直線(xiàn)上的情況。
(2)借助動(dòng)量定律ΔP=F·t,一般拿來(lái)解決P0、Pt;不在一條直線(xiàn)上或F為恒力的情況。
(二)沖量
1、沖量:力和力的作用時(shí)間的乘積稱(chēng)作該力的沖量。是矢量,假如在力的作用時(shí)間內(nèi),力的方向不變,則力的方向就是沖量的方向;沖量的合成與分解,按平行四邊形法則與三角形法則。沖量除了由力決定,還由力的作用時(shí)間決定。而力和時(shí)間都跟參照物的選擇無(wú)關(guān),所以力的沖量也與參照物的選擇無(wú)關(guān)。單位是N·s;
2、沖量的估算方式
(1)I=F·t。采用定義式直接估算、主要解決恒力的沖量估算問(wèn)題。
(2)借助動(dòng)量定律Ft=ΔP。主要解決變力的沖量估算問(wèn)題,但要注意上式中F為合外力(或某一方向上的合外力)。
(三)動(dòng)量定律

1、動(dòng)量定律:物體遭到合外力的沖量等于物體動(dòng)量的變化。Ft=mv'-mv或Ft=p'-p;該定理由牛頓第二定理推論下來(lái):(質(zhì)點(diǎn)m在短時(shí)間Δt內(nèi)受合力為F合,合力的沖量是F合Δt;質(zhì)點(diǎn)的初、末動(dòng)量是mv0、mvt,動(dòng)量的變化量是ΔP=Δ(mv)=mvt-mv0。依據(jù)動(dòng)量定律得:F合=Δ(mv)/Δt
2、單位:牛·秒與千克米/秒統(tǒng)一:l千克米/秒=1千克米/秒2·秒=牛·秒;
3、理解:(1)上式中F為研究對(duì)象所受的包括重力在內(nèi)的所有外力的合力。
(2)動(dòng)量定律中的沖量和動(dòng)量都是矢量。定律的表達(dá)式為一矢量式,等號(hào)的兩側(cè)不但大小相同,但是方向相同,在小學(xué)階段,動(dòng)量定律的應(yīng)用只限于一維的情況。這時(shí)可規(guī)定一個(gè)正方向,注意力和速率的正負(fù),這樣就把大量運(yùn)算轉(zhuǎn)化為代數(shù)運(yùn)算。
(3)動(dòng)量定律的研究對(duì)象通常是單個(gè)質(zhì)點(diǎn)。求變力的沖量時(shí),可利用動(dòng)量定律求動(dòng)量定理的速度有方向嘛,不可直接用沖量定義式。
4、應(yīng)用動(dòng)量定律的思路:
(1)明晰研究對(duì)象和受力的時(shí)間(明晰質(zhì)量m和時(shí)間t);
(2)剖析對(duì)象受力和對(duì)象初、末速率(明晰沖量I合,和初、未動(dòng)量P0,Pt);
(3)規(guī)定正方向,目的是將矢量運(yùn)算轉(zhuǎn)化為代數(shù)運(yùn)算;
(4)依據(jù)動(dòng)量定律列多項(xiàng)式
(5)解多項(xiàng)式。
(四)動(dòng)量定律應(yīng)用的注意事項(xiàng)
1、動(dòng)量定律的研究對(duì)象是單個(gè)物體或可看作單個(gè)物體的系統(tǒng),當(dāng)研究對(duì)象為物體系時(shí),物體系的總動(dòng)量的增量等于相應(yīng)時(shí)間內(nèi)物體系所受外力的合力的沖量,所謂物體系總動(dòng)量的增量是指系統(tǒng)內(nèi)各個(gè)物體動(dòng)量變化量的矢量和。而物體系所受的合外力的沖量是指系統(tǒng)內(nèi)各個(gè)物體所受的一切外力的沖量的矢量和。
2、動(dòng)量定律公式中的F是研究對(duì)象所受的包括重力在內(nèi)的所有外力的合力。它可以是恒力,也可以是變力。當(dāng)合外力為變力時(shí)F則是合外力對(duì)作用時(shí)間的平均值。
3、動(dòng)量定律公式中的Δ(mv)是研究對(duì)象的動(dòng)量的增量,是過(guò)程終態(tài)的動(dòng)量除以過(guò)程始態(tài)的動(dòng)量(要考慮方向),切不能顛倒始、終態(tài)的次序。
4、動(dòng)量定律公式中的等號(hào)表明合外力的沖量與研究對(duì)象的動(dòng)量增量的數(shù)值相等,方向一致,單位相同。但考生不能覺(jué)得合外力的沖量就是動(dòng)量的增量,合外力的沖量是造成研究對(duì)象運(yùn)動(dòng)改變的內(nèi)因,而動(dòng)量的增量卻是研究對(duì)象受外部沖量作用后的必然結(jié)果。
5、用動(dòng)量定律解題,只能選定月球或相對(duì)月球做勻速直線(xiàn)運(yùn)動(dòng)的物體做參照物。忽略沖量和動(dòng)量的方向性,導(dǎo)致I與P正負(fù)取值的混亂,或忽略動(dòng)量的相對(duì)性,選定相對(duì)月球做變速運(yùn)動(dòng)的物體做參照物,是解題錯(cuò)誤的常見(jiàn)情況。
(一)動(dòng)量守恒定理
1、內(nèi)容:互相作用的物體,假若不受外力或所受外力的合力為零,它們的總動(dòng)量保持不變,即作用前的總動(dòng)量與作用后的總動(dòng)量相等。
2、動(dòng)量守恒定理適用的條件
①系統(tǒng)不受外力或所受合外力為零。
②當(dāng)內(nèi)力遠(yuǎn)小于外力時(shí)。
③某一方向不受外力或所受合外力為零,或該方向上內(nèi)力遠(yuǎn)小于外力時(shí),該方向的動(dòng)量守恒。
3、常見(jiàn)的表達(dá)式
①p'=p,其中p'、p分別表示系統(tǒng)的末動(dòng)量和初動(dòng)量,表示系統(tǒng)作用前的總動(dòng)量等于作用后的總動(dòng)量。
②Δp=0,表示系統(tǒng)總動(dòng)量的增量等于零。
③Δp1=-Δp2,其中Δp1、Δp2分別表示系統(tǒng)內(nèi)兩個(gè)物體初、末動(dòng)量的變化量,表示兩個(gè)物體組成的系統(tǒng),各自動(dòng)量的增量大小相等、方向相反。
其中①的方式最常見(jiàn),具體來(lái)說(shuō)有以下幾種方式
A、m1vl+m2v2=m1v'l+m2v'2,各個(gè)動(dòng)量必須相對(duì)同一個(gè)參照物動(dòng)量定理的速度有方向嘛,適用于作用前后都運(yùn)動(dòng)的兩個(gè)物體組成的系統(tǒng)。
B、0=m1vl+m2v2,適用于原先靜止的兩個(gè)物體組成的系統(tǒng)。
C、m1vl+m2v2=(m1+m2)v,適用于兩物體作用后結(jié)合在一起或具有共同的速率的系統(tǒng)。
(二)動(dòng)量守恒定理的理解
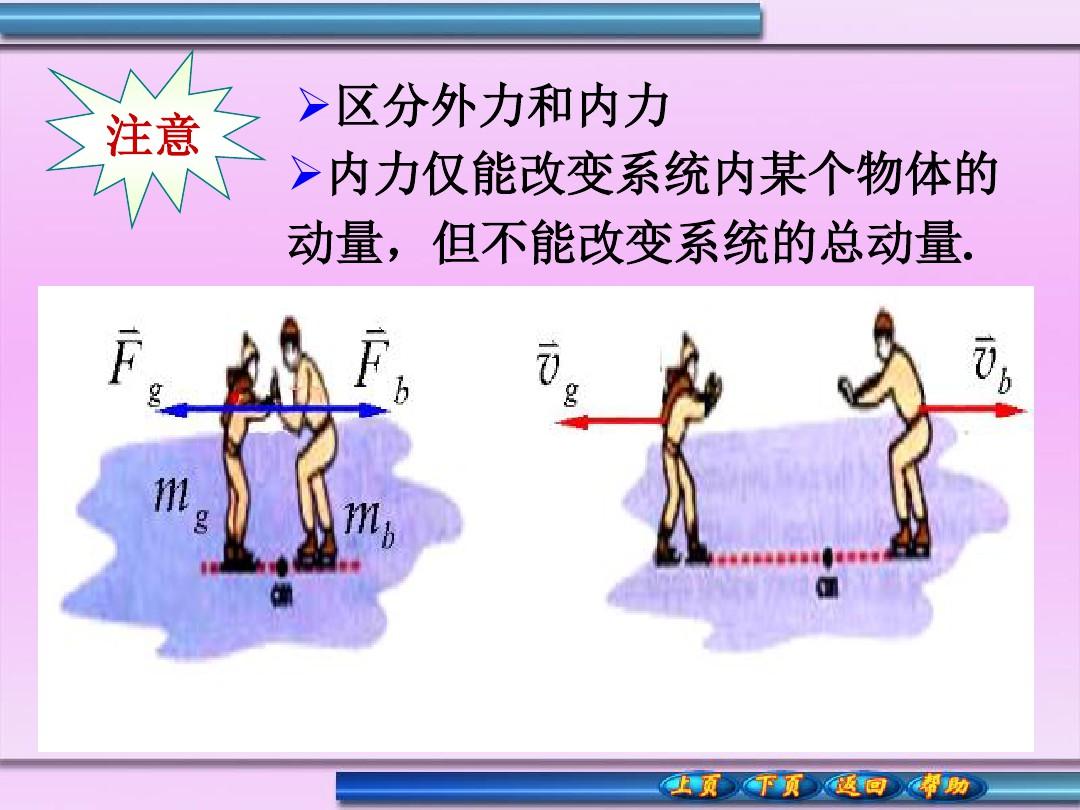
(1)動(dòng)量守恒定理是說(shuō)系統(tǒng)內(nèi)部物體間的互相作用只能改變每位物體的動(dòng)量,而不能改變系統(tǒng)的總動(dòng)量,在系統(tǒng)運(yùn)動(dòng)變化過(guò)程中的任一時(shí)刻,單個(gè)物體的動(dòng)量可以不同,但系統(tǒng)的總動(dòng)量相同。
(2)應(yīng)用此定理時(shí)我們應(yīng)當(dāng)選擇地面或相對(duì)地面靜止或勻速直線(xiàn)運(yùn)動(dòng)的物體做參照物,不能選擇相對(duì)地面作加速運(yùn)動(dòng)的物體為參照物。
(3)動(dòng)量是矢量,系統(tǒng)的總動(dòng)量不變是說(shuō)系統(tǒng)內(nèi)各個(gè)物體的動(dòng)量的矢量和不變。等號(hào)的涵義是說(shuō)等號(hào)的兩側(cè)不但大小相同,但是方向相同。