來自百度百科:
原文鏈接:
原文鏈接:///.html
一、凸透鏡,物距、像距、焦距、三者關系
物距為u,像距為v,焦距為f,兩者的關系為:1/v+1/u=1/f。
依據該關系,不同的物距、像距、焦距的關系促使成像特性不同:
1、當物距小于2倍焦距時,則像距在1倍焦距和2倍焦距之間,成倒立、縮小的虛像。此時像距大于物距,像比物小,物像異側。應用:拍照機、攝像機。
2、當物距等于2倍焦距時,則像距也在2倍焦距,成倒立、等大的虛像。此時物距等于像距,像與物大小相等,物像異側。應用:測焦距。
3、當物距大于2倍焦距、大于1倍焦距時,則像距小于2倍焦距初中凸透鏡成像規律表格,成倒立、放大的虛像。此時像距小于物距,像比物大,物像異側。應用:投影儀、幻燈機、電影放映機。
4、當物距等于1倍焦距時,則不成像,成平行光射出。
5、當物距大于1倍焦距時,則成正立、放大的實像。此時像距小于物距,像比物大,物像同側。應用:放大鏡。
二、凸透鏡光學成像模型
最上面一條從物體發出并平行于透鏡的光軸,經過透鏡折射后穿過另一側的焦點。
第二條光束穿過透鏡左側的焦點,經過折射,與光軸平行。
第三條光束直接穿過透鏡中心。因為透鏡垂直于主光軸并且厚度很小,當光透過其中心時,折射可以忽略不計。
其中u為物距,f為焦距,v為相距。兩者滿足關系式:
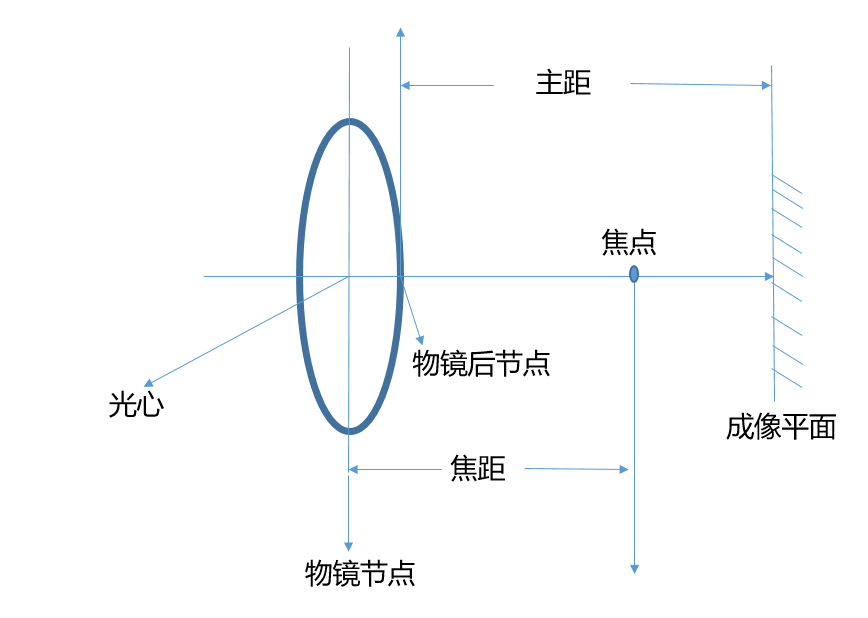
三、相機小孔成像模型
單反的鏡頭是一組透鏡,當平行于主光軸的光線穿過透鏡時,會聚到一點上,這個點稱作焦點,焦點到透鏡中心的距離稱作焦距f。數碼單反的鏡頭相當于一個凸透鏡,感光器件就處在這個凸透鏡的焦點附近,將焦距近似為凸透鏡中心到感光器件的距離時就成為小孔成像模型。小孔成像模型如圖所示。
四、相機模型四個座標系
數碼相機圖像拍攝的過程實際上是一個光學成像的過程。相機的成像過程涉及到四個坐標系:
世界座標系、相機座標系、圖像座標系、像素座標系以及這四個座標系的轉換。
①世界座標系:是客觀三維世界的絕對座標系,亦稱客觀座標系。由于數碼單反安放到三維空間中,我們須要世界座標系這個基準座標系來描述數碼單反的位置,而且用它來描述安放到此三維環境中的其它任何物體的位置,用(Xw,Yw,Zw)表示其座標值。
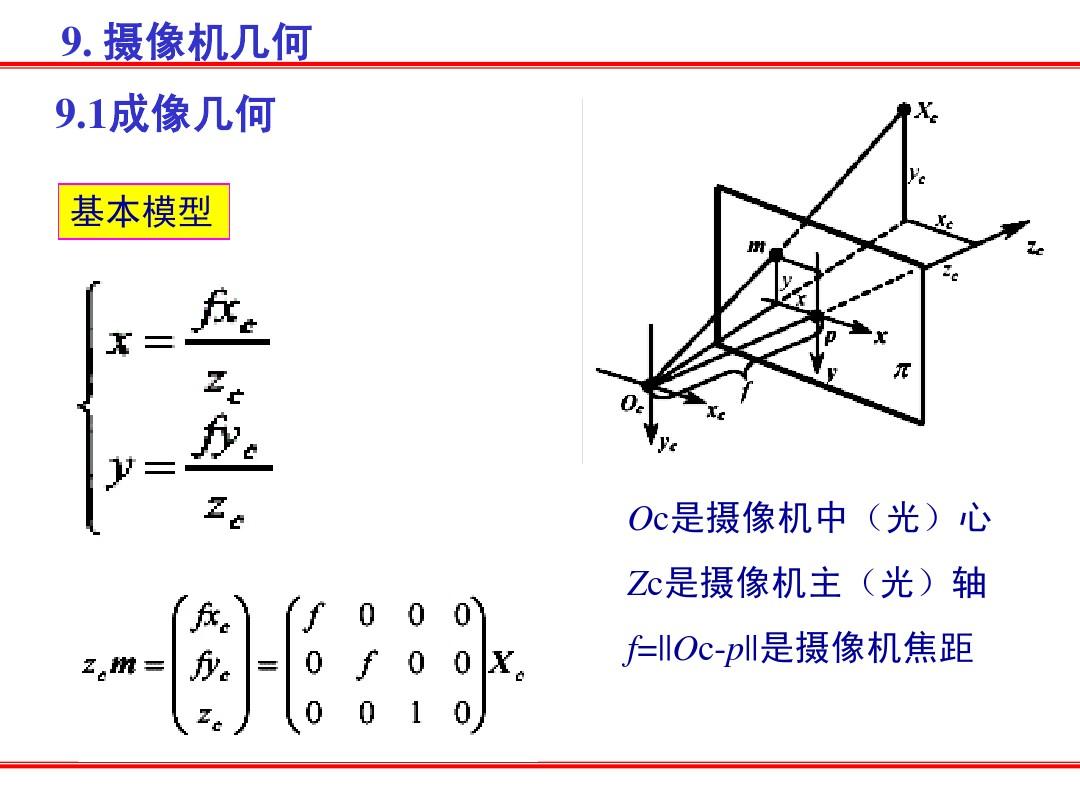
②相機座標系(光心座標系):以單反的光心為座標原點,X軸和Y軸分別平行于圖象座標系的X軸和Y軸,單反的光軸為Z軸,用(Xc,Yc,Zc)表示其座標值。
③圖像座標系:以CCD圖象平面的中心為座標原點,X軸和Y軸分別平行于圖象平面的兩條垂直邊,用(x,y)表示其座標值。圖象座標系是用化學單位(比如毫米)表示象素在圖象中的位置。
④像素座標系:以CCD圖象平面的左上角頂點為原點,X軸和Y軸分別平行于圖象座標系的X軸和Y軸,用(u,v)表示其座標值。數碼單反采集的圖象首先是產生標準聯通號的方式,之后再通過模數轉換變換為數字圖象。每幅圖象的儲存方式是M×N的字段,M行N列的圖象中的每一個元素的數值代表的是圖象點的灰度。這樣的每位元素叫象素,象素座標系就是以象素為單位的圖象座標系
1)、模型一
四個座標系的關系圖如右圖所示,其中M為三維空間點,m為M在圖象平面投影成的像點。
2)、模型二
四個座標系的關系圖如右圖所示,其中M為三維空間點,m為M在圖象平面投影成的像點。
3)、模型三
四個座標系的關系圖如右圖所示,其中P為三維空間點,p為P在圖象平面投影成的像點。
4)、模型四
四個座標系的關系圖如右圖所示,其中P為三維空間點,p為P在圖象平面投影成的像點。真實世界中的空間點
Pw(Xw,Yw,Zw),其對應的單反座標系座標為Pc(Xw,Yw,Zw),對應的圖象座標
系座標為P(x,y),對應的象素座標為p(u,v)。
五、像素座標系與圖象座標系
她們間的轉換公式,其中(u0,v0)是圖象座標系原點在象素座標系中的座標,dx和dy分別是每位象素在圖象平面x和y方向上的數學規格。
1、采用齊次座標再用矩陣方式將上式表示為
2、也可以寫成下邊
六、圖像座標系與單反座標系
其中f為焦距(像平面與單反座標系原點的距離)。用齊次座標系和矩陣表示上述關系:
七、相機座標系與世界座標系
單反座標系與世界座標系的變換為:
其中R為3×3正交旋轉矩陣,t為三維平移向量,綜合上去:
ax,ay分別是圖象水平軸和垂直軸的尺度因子。K的參數中只包含焦距、主點座標等只由單反的內部結構決定,因而稱K為內部參數矩陣,ax,ay,u0,v0稱作內部參數。M1中包含的旋轉矩陣和平移向量是由單反座標系相對于世界座標系的位置決定的,因而稱M1為單反的外部參數矩陣,R和t稱作外部參數,M叫投影矩陣。單反標定就是確定單反的內部參數和外部參數。
也可以寫成下邊的公式。
八、畸變標定
實際成像模型
理想的透視模型是針眼成像模型,物和像會滿足相像三角形的關系。并且實際上因為單反光學系統存在加工和裝配的偏差,透鏡就并不能滿足物和像成相像三角形的關系,所以單反圖象平面上實際所成的像與理想成像之間會存在畸變。畸變屬于成像的幾何失真,是因為焦平面上不同區域對圖象的放大率不同產生的畫面扭曲變型的現象,這些變型的程度從畫面中心至畫面邊沿依次遞增,主要在畫面邊沿反映比較顯著。為了減少畸變,拍攝圖片時應盡量避開用鏡頭焦距的最廣角端或最遠端拍攝。實際的單反成像模型如右圖所示。
其中mr(xr,yr)表示實際投影點的像平面座標系下的化學座標,mi(xi,yi)表示理想投影點的像平面座標系下的化學座標。鏡頭的畸變模型可表示為:
σx和σy是非線性畸變值,它包括徑向畸變和偏心畸變和薄棱鏡畸變等。
理論上來說鏡頭都存在徑向和切向畸變,而且一般徑向畸變較大,切向畸變較小。徑向畸變的模型可由下邊的模型來表示:
其中k1k2k3……示徑向畸變系數,,一般情況下徑向畸變系數只考慮到一階或二階就可以滿足精度需求了。
偏心畸變模型是因為多個光學鏡頭的光軸不能完全共線形成的,這些畸變是由徑向和切向畸變共同構成的,物理模型可表示如下:
其中p1,p2為切向畸變系數。薄棱鏡畸變是因為鏡頭設計制造缺陷和加工安裝所引起的,如鏡頭與單反成像平面有一個很小的夾角等。由于薄棱鏡畸變特別小,一般不考慮,這兒只考慮徑向畸變和偏心畸變,畸變總的可以表示為:
實際的成像模型為:
下邊的是另一個博客參考的,覺得不是這樣,我實際開發項目用的模型是里面的,采用opcv庫,獲取標定參數(下章節將提到怎樣標定,畸變校準)
,并且公式可以參考一下。
里面推論了單反投影成像的物理模型,這是在理想狀況下推論的,實際上因為單反
光學系統存在加工和裝配的偏差,透鏡就并不能滿足物和像成相像三角形的關系,所以
單反圖象平面上實際所成的像與理想成像之間會存在畸變。畸變屬于成像的幾何失真,
是因為焦平面上不同區域對圖象的放大率不同產生的畫面扭曲變型的現象,這些變型的
程度從畫面中心至畫面邊沿依次遞增,主要在畫面邊沿反映比較顯著。
單反的畸變可以由非線性模型來表示,因為公式比較復雜,對于推論過程,此處將
不再贅言,最后給出簡化后的畸變模型:
其中(X,Y,Z)為世界座標系下的座標,(x,y,x)為單反座標系下的座標初中凸透鏡成像規律表格,歸一化為(x’,y’),
(x’’,y’’)為加入畸變參數的歸一化座標,(u,v)為畸變模型下的象素座標。?K1,?2,?3,?4,?5,?6,為徑向畸變參數,?1,?2為切向畸變參數。