機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析本章要解決問題預(yù)制構(gòu)件組合具有確定相對運(yùn)動(dòng)的條件是哪些?如何勾畫機(jī)構(gòu)運(yùn)動(dòng)簡圖、機(jī)構(gòu)自由度的估算。何謂速率瞬心?速率瞬心有什么用途?基本要求自由度、運(yùn)動(dòng)副、瞬心、復(fù)合合頁、局部自由度、虛約束;能正確估算平面機(jī)構(gòu)的自由度;能勾畫簡單機(jī)械的機(jī)構(gòu)運(yùn)動(dòng)簡圖;能正確判斷瞬心。重點(diǎn)機(jī)構(gòu)自由度的估算;機(jī)構(gòu)運(yùn)動(dòng)簡圖勾畫。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析1-1運(yùn)動(dòng)副及其分類預(yù)制構(gòu)件與零件零件是機(jī)器中的一個(gè)獨(dú)立制造單元體;預(yù)制構(gòu)件是機(jī)器中的一個(gè)獨(dú)立運(yùn)動(dòng)單元體。從運(yùn)動(dòng)來看,任何機(jī)器都是由若干個(gè)預(yù)制構(gòu)件組合而成的。任何機(jī)器都是由許多零件組合而成的。汽缸體曲軸體曲軸頭凸輪蝸桿活塞預(yù)制構(gòu)件常常是由若干零件剛性地連接在一起的獨(dú)立運(yùn)動(dòng)的整體真實(shí)曲軸曲軸體曲軸頭螺釘螺絲螺帽機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析與動(dòng)力源組合機(jī)器的組成(從運(yùn)動(dòng)觀點(diǎn)看)由預(yù)制構(gòu)件組成(從制造觀點(diǎn)看)由零件組成機(jī)械機(jī)器機(jī)構(gòu)預(yù)制構(gòu)件零件通用零件專用零件原動(dòng)預(yù)制構(gòu)件從動(dòng)預(yù)制構(gòu)件零件預(yù)制構(gòu)件機(jī)構(gòu)機(jī)器靜連接動(dòng)連接(運(yùn)動(dòng)副)視頻:零件的加工方式機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析平面運(yùn)動(dòng)預(yù)制構(gòu)件的自由度自由度:把預(yù)制構(gòu)件相對于參考系具有的獨(dú)立運(yùn)動(dòng)參數(shù)的數(shù)量稱為自由度。
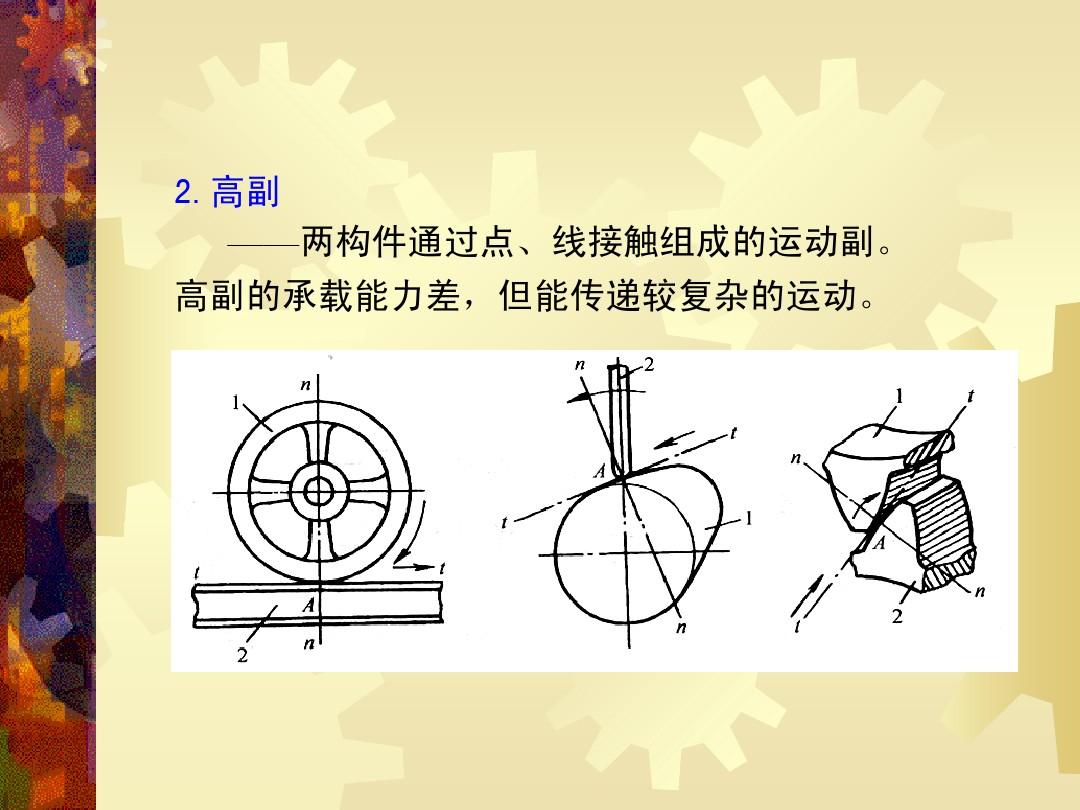
推論:一個(gè)作平面運(yùn)動(dòng)的自由預(yù)制構(gòu)件有三個(gè)自由度。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析二、運(yùn)動(dòng)副二、運(yùn)動(dòng)副運(yùn)動(dòng)副:兩預(yù)制構(gòu)件直接接觸而產(chǎn)生的可動(dòng)連接機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析運(yùn)動(dòng)副分類運(yùn)動(dòng)副分類按相對運(yùn)動(dòng)分類機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析按接觸方式分類:高副:點(diǎn)、線接觸平面低副空間低副空間低副平面低副平面低副機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析按相對運(yùn)動(dòng)分類:運(yùn)動(dòng)副的性質(zhì)(即運(yùn)動(dòng)副引入的約束)確定了兩預(yù)制構(gòu)件的相對運(yùn)動(dòng)按相對運(yùn)動(dòng)分類:轉(zhuǎn)動(dòng)副:相對轉(zhuǎn)動(dòng)——回轉(zhuǎn)副(合頁)聯(lián)通副:相對聯(lián)通螺旋副:螺旋運(yùn)動(dòng)球面副:球面運(yùn)動(dòng)機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析運(yùn)動(dòng)副類型小結(jié)平面低副:轉(zhuǎn)動(dòng)副、移動(dòng)副(面接觸)平面高副:蝸桿副、凸輪副(點(diǎn)、線接觸)空間低副:螺旋副、球面副、圓柱副(面接觸)空間高副:球和圓錐與平面、球與圓錐副(點(diǎn)、線接觸)運(yùn)動(dòng)副特點(diǎn):運(yùn)動(dòng)副一經(jīng)產(chǎn)生,組成它的兩個(gè)預(yù)制構(gòu)件間的可能的相對運(yùn)動(dòng)就確定。并且這些可能的相對運(yùn)動(dòng),動(dòng)副類型有關(guān),而與運(yùn)動(dòng)副的具體結(jié)構(gòu)無關(guān)。工程上常用一些規(guī)定的符號(hào)代表運(yùn)動(dòng)副機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析平面副低副:轉(zhuǎn)動(dòng)副、移動(dòng)副(面接觸)高副:蝸桿副、凸輪副(點(diǎn)、線接觸)機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析空間副高副:點(diǎn)、線接觸球面副螺旋副了解機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析運(yùn)動(dòng)鏈:兩個(gè)以上的預(yù)制構(gòu)件通過運(yùn)動(dòng)副聯(lián)接而構(gòu)成的系統(tǒng)。
閉式運(yùn)動(dòng)鏈()單封閉回路閉鏈(p為運(yùn)動(dòng)副數(shù),N為預(yù)制構(gòu)件數(shù))多封閉回路運(yùn)動(dòng)閉鏈(k為回路數(shù))開式運(yùn)動(dòng)鏈()開式運(yùn)動(dòng)鏈廣泛應(yīng)用于機(jī)械手和機(jī)器人中。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析2、機(jī)構(gòu)機(jī)構(gòu):在運(yùn)動(dòng)鏈上將一預(yù)制構(gòu)件固定為機(jī)架,而通過某種形式使其余預(yù)制構(gòu)件都具有確定運(yùn)動(dòng),則運(yùn)動(dòng)鏈便成為機(jī)構(gòu)。其余預(yù)制構(gòu)件運(yùn)動(dòng)是否確定?機(jī)構(gòu)滿足條件在另一個(gè)(或幾個(gè))預(yù)制構(gòu)件上加上已知運(yùn)動(dòng)固定一個(gè)預(yù)制構(gòu)件機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析同一運(yùn)動(dòng)鏈可以生成的不同機(jī)構(gòu):曲柄滑塊機(jī)構(gòu)搖塊機(jī)構(gòu)導(dǎo)桿機(jī)構(gòu)運(yùn)動(dòng)鏈的生成是創(chuàng)造、獲取新機(jī)構(gòu)的重要手段。運(yùn)動(dòng)鏈的設(shè)計(jì)只關(guān)注預(yù)制構(gòu)件數(shù)和連接那些預(yù)制構(gòu)件的運(yùn)動(dòng)副的數(shù)目和類型,所以又稱為機(jī)構(gòu)的型數(shù)綜合。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析從動(dòng)件機(jī)架機(jī)構(gòu)機(jī)架:固定不動(dòng)的預(yù)制構(gòu)件機(jī)構(gòu)中按給定的運(yùn)動(dòng)規(guī)律獨(dú)立運(yùn)動(dòng)的預(yù)制構(gòu)件。從動(dòng)件:其余的可動(dòng)預(yù)制構(gòu)件曲軸與連架桿:預(yù)制構(gòu)件的類型:起碼1個(gè)從動(dòng)件系統(tǒng)機(jī)構(gòu)機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析按照機(jī)構(gòu)中各預(yù)制構(gòu)件的相對運(yùn)動(dòng)是否在同一平面或平行平面內(nèi),可將機(jī)構(gòu)分為平面機(jī)構(gòu)和空間機(jī)構(gòu)。
空間RSRC機(jī)構(gòu)球面4R機(jī)構(gòu)空間RSSP機(jī)構(gòu)平面機(jī)構(gòu)是我們的主要研究對象。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析例題1-2平面機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析機(jī)構(gòu)各部份的運(yùn)動(dòng),取決于:原動(dòng)件的運(yùn)動(dòng)規(guī)律、各運(yùn)動(dòng)副的類型、機(jī)構(gòu)的運(yùn)動(dòng)規(guī)格(確定各運(yùn)動(dòng)副相對位置的規(guī)格)機(jī)構(gòu)運(yùn)動(dòng)簡圖:(表示機(jī)構(gòu)運(yùn)動(dòng)特點(diǎn)的一種工程用圖)用簡單腰線表示預(yù)制構(gòu)件規(guī)定符號(hào)代表運(yùn)動(dòng)副按比列定出運(yùn)動(dòng)副的相對位置與原機(jī)械具有完全相同的運(yùn)動(dòng)特點(diǎn)比較:機(jī)構(gòu)示意圖:沒嚴(yán)格依照比列勾畫的機(jī)構(gòu)運(yùn)動(dòng)簡圖用途:剖析現(xiàn)有機(jī)械,構(gòu)思設(shè)計(jì)新機(jī)械機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率分析三副預(yù)制構(gòu)件機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析聯(lián)通副轉(zhuǎn)動(dòng)動(dòng)漫1轉(zhuǎn)動(dòng)動(dòng)漫2聯(lián)通動(dòng)漫1聯(lián)通動(dòng)漫2聯(lián)通動(dòng)漫3繼續(xù)機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析續(xù)運(yùn)動(dòng)副的表示方式高副(蝸桿副、凸輪副)動(dòng)漫1動(dòng)漫2機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速度剖析圖上規(guī)格(mm)mm實(shí)際規(guī)格1)剖析機(jī)構(gòu),觀察相對運(yùn)動(dòng),數(shù)清所有預(yù)制構(gòu)件的數(shù)量;2)確定所有運(yùn)動(dòng)副的類型和數(shù)量;4)確定比列尺:5)用規(guī)定的符號(hào)和腰線勾畫成簡圖。(從原動(dòng)件開始畫)3)選擇合理的位置(即能充分反映機(jī)構(gòu)的特點(diǎn));機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析例1:運(yùn)動(dòng)簡圖的勾畫剖析大型壓力機(jī)編號(hào)原則:注意分辨位置重疊的不同預(yù)制構(gòu)件和同軸剛性連接的多個(gè)零件。
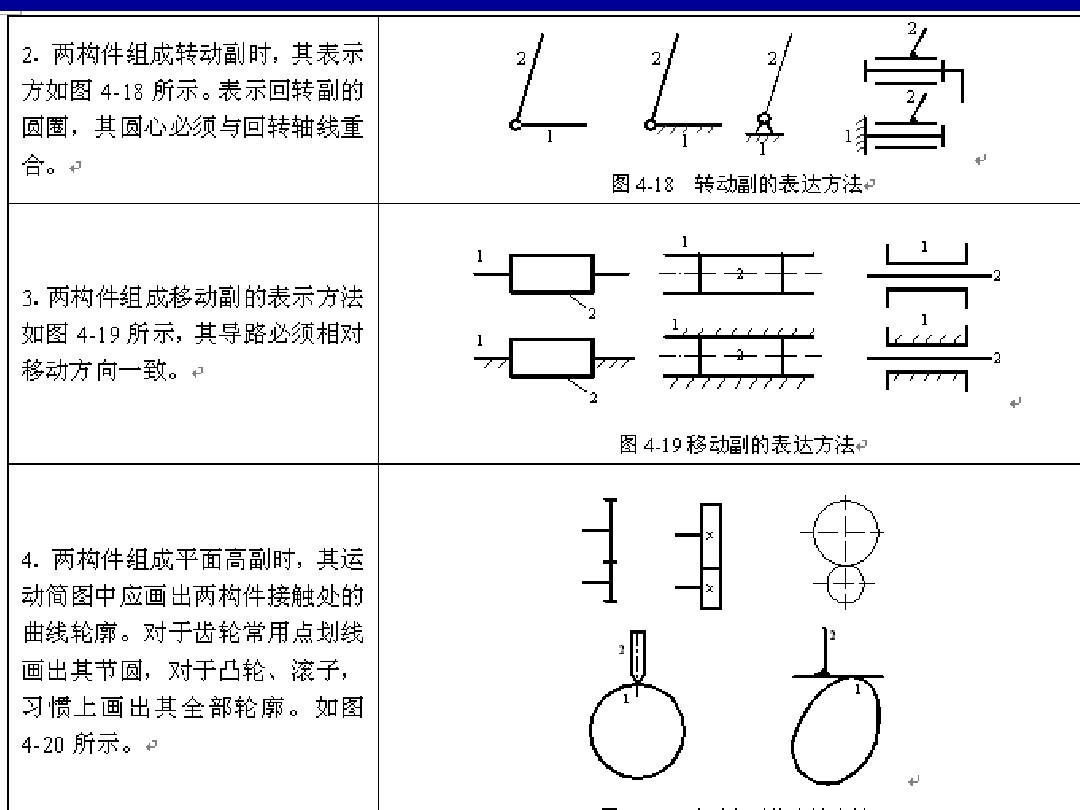
后者分別編號(hào),前者采用一個(gè)編號(hào),加`以示區(qū)別。1.剖析整個(gè)機(jī)構(gòu)的工作原理機(jī)構(gòu)組成動(dòng)作原理和運(yùn)動(dòng)情況偏心輪1蝸桿1`滑塊7壓頭8執(zhí)行預(yù)制構(gòu)件機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析2.順著傳動(dòng)路線,剖析相鄰預(yù)制構(gòu)件之間的相對運(yùn)動(dòng)關(guān)系,確定運(yùn)動(dòng)副的類型和數(shù)量。轉(zhuǎn)動(dòng)副聯(lián)通副平面高副機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析選擇適當(dāng)?shù)囊晥D平面選擇原則可以選擇其他視圖平面作為補(bǔ)充。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析繪圖選擇機(jī)架提取預(yù)制構(gòu)件的運(yùn)動(dòng)規(guī)格確定比列尺選擇機(jī)構(gòu)運(yùn)動(dòng)中的一個(gè)狀態(tài)確定各運(yùn)動(dòng)副位置,繪圖編號(hào):A、B、C…表示運(yùn)動(dòng)副…表示固定轉(zhuǎn)軸原動(dòng)件的運(yùn)動(dòng)方向動(dòng)漫機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析例2:勾畫內(nèi)燃機(jī)的機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析汽缸體1活塞2進(jìn)氣閥3排氣閥4曲軸5凸輪6曲軸7蝸桿10解:1)剖析運(yùn)動(dòng),確定預(yù)制構(gòu)件的類型和數(shù)目2)確定運(yùn)動(dòng)副的類型和數(shù)量3)選擇視圖平面4)選定比列尺,按照機(jī)構(gòu)運(yùn)動(dòng)規(guī)格,定出各運(yùn)動(dòng)副間的相對位置5)畫出各運(yùn)動(dòng)副和機(jī)構(gòu)符號(hào),并表示出各預(yù)制構(gòu)件機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析內(nèi)燃機(jī)工作原理機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析勾畫顎式破碎機(jī)的機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析勾畫圖示機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析勾畫圖示牛頭銑床主運(yùn)動(dòng)機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析例6:勾畫圖示水泵機(jī)構(gòu)運(yùn)動(dòng)簡圖機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析幾種特殊結(jié)構(gòu)的處理復(fù)合合頁局部自由度虛約束小結(jié)1-3平面機(jī)構(gòu)的自由度機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析平面運(yùn)動(dòng)預(yù)制構(gòu)件的自由度(預(yù)制構(gòu)件可能出現(xiàn)的獨(dú)立運(yùn)動(dòng))平面運(yùn)動(dòng)副引入的約束R(對獨(dú)立的運(yùn)動(dòng)所加的限制)自由度降低轉(zhuǎn)動(dòng)副(或合頁)兩預(yù)制構(gòu)件只能在一個(gè)平面內(nèi)作相對轉(zhuǎn)動(dòng)。
限制兩個(gè)自由度:(兩個(gè)聯(lián)通)保留一個(gè)自由度(轉(zhuǎn)動(dòng))機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析聯(lián)通副限制兩個(gè)自由度:(一個(gè)聯(lián)通,一個(gè)轉(zhuǎn)動(dòng))保留一個(gè)自由度(聯(lián)通機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析限制一個(gè)自由度:(一個(gè)聯(lián)通)保留兩個(gè)自由度(一個(gè)聯(lián)通,一個(gè)轉(zhuǎn)推論:平面低副引入兩個(gè)約束,平面高副引入一個(gè)約束。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析平面機(jī)構(gòu)自由度估算公式假如:活動(dòng)預(yù)制構(gòu)件數(shù):n未聯(lián)接前總自由度:3n聯(lián)接后引入的總約束數(shù):2p機(jī)構(gòu)自由度F:F=3n機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析機(jī)構(gòu)自由度舉例:機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析2-23-0=0機(jī)構(gòu)具有確定運(yùn)動(dòng)的條件如圖所示的平面三預(yù)制構(gòu)件運(yùn)動(dòng)鏈,其自由度表明該運(yùn)動(dòng)鏈中各預(yù)制構(gòu)件間已無相對運(yùn)動(dòng),只構(gòu)成了一個(gè)剛性桁架,因此不能成為機(jī)構(gòu)。注:要使所設(shè)計(jì)的運(yùn)動(dòng)鏈成為機(jī)構(gòu),組成運(yùn)動(dòng)鏈的各預(yù)制構(gòu)件之間必須具有確定的相對運(yùn)動(dòng)。不能形成運(yùn)動(dòng)或作無規(guī)則運(yùn)動(dòng)的運(yùn)動(dòng)鏈均不能成為機(jī)構(gòu)。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析3-25-0=-1表明該運(yùn)動(dòng)鏈因?yàn)榧s束過多,已成為超靜定桁架了,也不能成為機(jī)構(gòu)。
機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析3-24-0=若取預(yù)制構(gòu)件若取預(yù)制構(gòu)件11為原動(dòng)件,則預(yù)制構(gòu)件為原動(dòng)件,則預(yù)制構(gòu)件11時(shí)常轉(zhuǎn)過一個(gè)角度機(jī)械自由度計(jì)算例題詳解,預(yù)制構(gòu)件轉(zhuǎn)過一個(gè)角度,預(yù)制構(gòu)件22和預(yù)制構(gòu)件和預(yù)制構(gòu)件33便有便有一個(gè)確定的相對運(yùn)動(dòng),也就是說這一個(gè)確定的相對運(yùn)動(dòng),也就是說這個(gè)運(yùn)動(dòng)鏈能成為機(jī)構(gòu)。個(gè)運(yùn)動(dòng)鏈能成為機(jī)構(gòu)。假如同時(shí)使預(yù)制構(gòu)件假如同時(shí)使預(yù)制構(gòu)件3也成為原動(dòng)件,也成為原動(dòng)件,則運(yùn)動(dòng)鏈內(nèi)部的運(yùn)動(dòng)關(guān)系將發(fā)生矛則運(yùn)動(dòng)鏈內(nèi)部的運(yùn)動(dòng)關(guān)系將發(fā)生矛盾,最薄弱的預(yù)制構(gòu)件將毀壞盾,最薄弱的預(yù)制構(gòu)件將毀壞說明:要使自由度小于零的運(yùn)動(dòng)鏈成為機(jī)構(gòu),原動(dòng)件的數(shù)量不可少于運(yùn)動(dòng)鏈的自由度數(shù)。機(jī)械設(shè)計(jì)基礎(chǔ)—第1章平面機(jī)構(gòu)的自由度和速率剖析4-25-0=若同時(shí)取預(yù)制構(gòu)件若同時(shí)取預(yù)制構(gòu)件11和預(yù)制構(gòu)件和預(yù)制構(gòu)件44作為原動(dòng)件,則作為原動(dòng)件機(jī)械自由度計(jì)算例題詳解,則可以看出,預(yù)制構(gòu)件可以看出,預(yù)制構(gòu)件22和預(yù)制構(gòu)件和預(yù)制構(gòu)件3具有確定的運(yùn)動(dòng),具有確定的運(yùn)動(dòng),即該運(yùn)動(dòng)鏈能成為機(jī)構(gòu)。即該運(yùn)動(dòng)鏈能成為機(jī)構(gòu)。假如只取預(yù)制構(gòu)件1為原動(dòng)件,處于AB位置時(shí),