以下內容大部分基于高中知識
電容電路中導體棒的運動是高中電磁感應問題的經典模型。 其加工方法技術性很強,但也比較固定。
一、傳統方法處理幾種基本情況 1、有初速度且無外力(即有初始電荷)
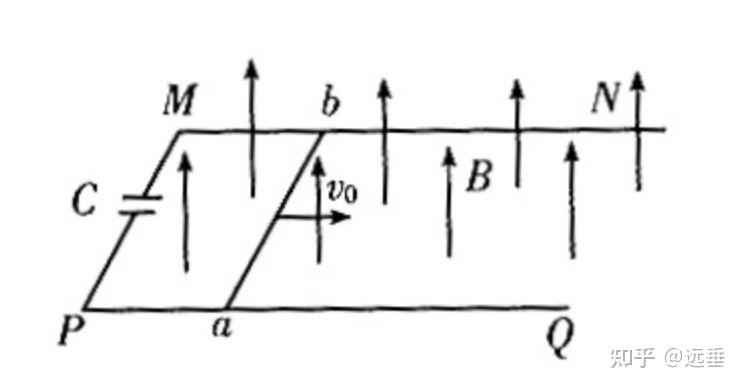
對于這種情況,可以使用直觀的動力學分析
ma=BiL
然后將等式兩邊求和。 這是一個經典的技術。
sum_{}^{}{maDelta t}=sum_{}^{}{BLiDelta t}
請注意,加速度的積分是速度的變化安培力方向判斷,電流的積分是通過的電荷量。
mDelta v=BLDelta q
引入初始條件和最終條件
初始電量為0
BLv_{微}=U_{十};q_{十}=CU_{十}
組織良好
v_{End}=frac{mv_{0}}{m+B^{2}L^{2}C}
此時,導體棒的速度將趨于恒定值
2、有外力但無初速度。
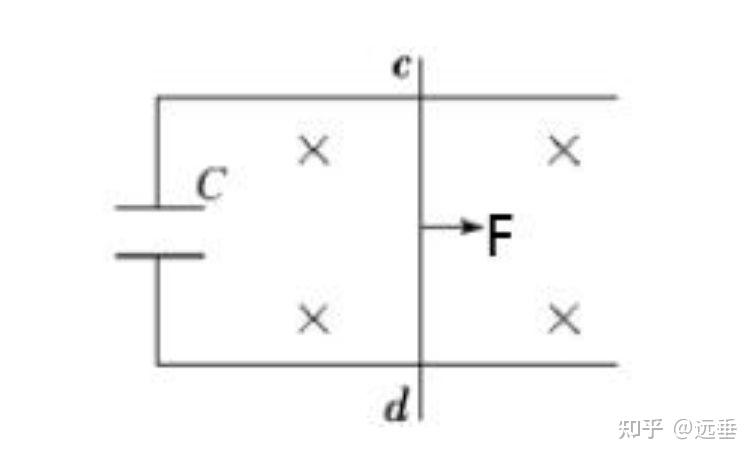
這時就可以利用安培力的沖量來進行處理。 當然,動態分析的效果也是一樣的。
安培力脈沖
F_{安}=BiL
F_{安}Delta t=BLiDelta t
sum_{}^{}{}F_{安}Delta t=sum_{}^{}{}BLiDelta t
I_{安}=BLDelta q
所以對于導體棒的動量定理
mDelta v=-I_{安}+Ft
同樣的原因
Delta q=CDelta U=BLCDelta v
組織良好
Delta v=frac{F}{m+B^{2}L^{2}C}t
此時,導體棒將以勻加速直線運動。
3.有外力和初速度。
這種情況其實和第二種情況類似,但是在和朋友討論的時候,筆者注意到,此時在某些情況下,很容易在判斷安培力的方向時出現錯誤。
我們看下面的例子
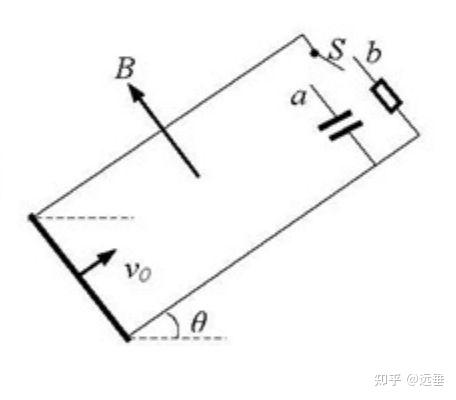
如圖所示,有一條足夠長的光滑平行軌道,其間距為L,與水平方向的夾角為θ。 該軌道以電容器和固定值電阻器終止。 磁場強,磁感應強度為B。將單刀雙擲開關接至a點。 質量為 m 的導體棒,無論電阻如何,在軌道底部獲得初速度 v_{0} 并沿軌道向上移動。 當到達最高點時,單刀雙擲開關與b點接通。 點后,一段時間后導桿返回軌道底部。 已知定值電阻的阻值為R,電容器的電容量為C,重力加速度為g,不包括軌道電阻。beg
(1) 當導體棒獲得初速度v_{0}時,電容器的充電量;
(2) 導體棒向上滑動過程中加速度的大小;
(3) 已知導體棒到達軌道底部的速度為v,求導體棒滑動過程中定值電阻產生的熱量和導體棒的運動時間。
我們直接看第二個子問題,是研究導體棒向上滑動的過程。 這個問題的關鍵是確定安培力的方向。 筆者在網上尋找答案時,發現了兩種不同的說法。
如果我們簡單地將導體棒視為電源,根據右手定則,電流的方向是逆時針方向,安培力的方向是向下的。
但這個判斷忽略了電容的放電
在每個小時間間隔內,由于導體棒首先發生減速,因此電容器的電壓(前一時刻的動態電壓)大于導體棒切割磁力線時產生的電壓(前一時刻的動態電壓)。下一刻)。
U_{C}=BLv_{t}
U_{棒}=BLv_{t+Delta t}
由于減速
v_{t+Delta t}">v_{t}>v_{t+Delta t}
U_{棒}"> U_{C}>U_{棒}
因此,電容器的右極板為正極,電流方向為順時針方向,安培力方向為向上。
確定了安培力的方向后,就可以使用與上一類似的步驟來解決問題。
mgsintheta-BiL=ma
sum_{}^{}{}mgsinthetaDelta t-sum_{}^{}{}BLiDelta t=sum_{}^{}{}maDelta t
mgsinthetacdot Delta t-BLDelta q=mDelta v
又Delta q=CDelta U=BLCDelta v
組織良好
Delta v=frac{mgsintheta}{m+B^{2}L^{2}C}t
導體棒也作勻加速(減速)直線運動。
我們可以看到,上述三種情況得到的表達式的分母都是相同的,我們可以據此來驗證結果。
2、電容電路節能研究
在學習物理的過程中,我們經常發現使用守恒方程進行計算可以避免很多復雜的分析。 下面我們介紹一下電容器的能量公式進行研究。
儲存在電容器中的能量
從電容器的定義來看
U=frac{q}{C}
電功率還有一個表達方式
Delta W=UDelta q
W=sum_{0}^{q}{frac{q}{C}Delta q}
這里可以簡單積分得到表達式,或者利用函數圖像面積的物理意義(類比彈簧彈性勢能公式)
W=frac{q^{2}}{2C}=frac{C}{2}U^{2}
我們以上面的第三種情況為例
以初始時刻為引力勢能零點,初始能量為
E_{1}=frac{1}{2}mv_1^{2}+frac{1}{2}CU_{1}^{2}+0
假設沿導軌方向的運動x,則此時的能量為
E_{2}=frac{1}{2}mv_2^{2}+frac{1}{2}CU_{2}^{2}+mgsintheta cdot x
且U=BLv; E_1=E_2
組織良好
2cdotfrac{mgsin theta }{m+B^2L^2C}cdot x=v_1^2-v_2^2
導體棒作勻加速度直線運動安培力方向判斷,其結果與動力推導相同。
我們可以發現,用能量守恒定律進入問題可以避免判斷安培力的方向,并且只需要無腦公式。 電容能量雖然是超等知識,但理解起來并不困難,可以作為驗證的手段。
3. 阻力不容忽視的非理想情況
高中時,我們討論過電容問題中忽略電阻的情況。 如果電阻不能忽略,簡單的微量元素法就會失敗。
我們將環路電阻等同于 R,然后我們就得到了整個環路的基爾霍夫方程
U_桿=Ri+u_C
代入 U_rod=BLv;u_C=frac{q}{C}
BLv=Ri+frac{q}{C}
對方程兩邊求導
BLfrac{dv}{dt}=Rfrac{di}{dt}+frac{1}{C}frac{dq}{dt}
從 i=frac{dq}{dt}
BLfrac{dv}{dt}=Rfrac{di}{dt}+frac{1}{C}i (star)
還有動力學方程
ma=F-BiL
寫成微分形式
mfrac{dv}{dt}=F-BLi
同時 star 表達式消除了包含 v 的項
mRCfrac{di}{dt}+(m+B^2L^2C)i-BLCF=0
frac{di}{dt}+frac{m+B^2L^2C}{mRC}i=frac{BLF}{mR} (starstar)
這是使用常變分法的一階線性微分方程
frac{di}{i}=-frac{m+B^2L^2C}{mRC}dt
lni=-frac{m+B^2L^2C}{mRC}t+
i=cdot e^{-frac{m+B^2L^2C}{mRC}t}
i=u(t)cdot e^{-frac{m+B^2L^2C}{mRC}t}
\frac{di}{dt}=u^{'}(t)cdot e^{-frac{m+B^2L^2C}{mRC}t}-frac{m+B^2L^ 2C}{mRC}u(t)cdot e^{-frac{m+B^2L^2C}{mRC}t}
代入starstar公式,可得
frac{du}{dt}=frac{BLF}{mR}cdot e^{frac{m+B^2L^2C}{mRC}t}
u(t)=frac{BLCF}{m+B^2L^2C}cdot e^{frac{m+B^2L^2C}{mRC}t}+
所以
i=cdot e^{-frac{m+B^2L^2C}{mRC}t}+frac{BLCF}{m+B^2L^2C}
當t=0時,電容沒有充電(需要一個充電過程),所以有
i_0=frac{BLv_0}{R}
可確定常數
=frac{BLv_0}{R}-frac{BLCF}{m+B^2L^2C}
返回 mfrac{dv}{dt}=F-BLi
frac{dv}{dt}=frac{F}{m}-frac{BL}{m}(cdot e^{-frac{m+B^2L^2C}{mRC}t}+ frac{BLCF}{m+B^2L^2C})
a=frac{F}{m+B^2L^2C}-frac{BL}{m}cdot e^{-frac{m+B^2L^2C}{mRC}t}
當t很大時,加速度趨于恒定值。 注意,這個固定值是忽略阻力時的加速度。
不可缺少的
v=v_0+frac{F}{m+B^2L^2C}t+frac{BLCR}{m+B^2L^2C}cdot e^{-frac{m+B^2L^2C}{ mRC}t}
當R很小時,指數趨于負無窮大,指數函數值趨于0,這是勻加速的情況,這與忽略阻力的計算一致。